
Professional Documents
Culture Documents
로보스타 - CONTROLLER
로보스타 - CONTROLLER
Uploaded by
choihero3329Copyright:
Available Formats
You might also like
- Sconi 2250 ADocument2 pagesSconi 2250 A반기서No ratings yet
- 01 Varistor KorDocument29 pages01 Varistor Kor이태규No ratings yet
- 용성Document22 pages용성박건호 (잼디아)No ratings yet
- MS Servo PDFDocument29 pagesMS Servo PDFdae hee hanNo ratings yet
- MD모터사양서V14GDocument77 pagesMD모터사양서V14Gsangwoo jungNo ratings yet
- Neopis Epic-M2500 Kor Cat V2.5Document8 pagesNeopis Epic-M2500 Kor Cat V2.5jundong choNo ratings yet
- Curve จานหมุน Over voltage Type GVO-CD1Document5 pagesCurve จานหมุน Over voltage Type GVO-CD1หนุ่ม วัยทองNo ratings yet
- LS2107PF-LW1152PF - 매뉴얼 - 240513 v2Document8 pagesLS2107PF-LW1152PF - 매뉴얼 - 240513 v2kimgangmin1003No ratings yet
- K-PAM DG3300 사양서 (V2.01)Document72 pagesK-PAM DG3300 사양서 (V2.01)marron66666No ratings yet
- Curve จานหมุน Under Voltage Type GVU-CD1Document4 pagesCurve จานหมุน Under Voltage Type GVU-CD1หนุ่ม วัยทองNo ratings yet
- VS (Ver 4.3) (041-060)Document20 pagesVS (Ver 4.3) (041-060)NikoNo ratings yet
- Tokimec Eha Catalog - 20210209Document10 pagesTokimec Eha Catalog - 20210209박채영No ratings yet
- EM 계전 VIPAM3300-F K-2017Document23 pagesEM 계전 VIPAM3300-F K-2017marron66666No ratings yet
- E50S Cat Kor 160408Document3 pagesE50S Cat Kor 160408머신비전No ratings yet
- 스텝모터원리Document58 pages스텝모터원리jinriNo ratings yet
- (※별첨1.) Dc Acb Catalog Ko 202102Document92 pages(※별첨1.) Dc Acb Catalog Ko 202102LS ELECTRIC INDIANo ratings yet
- CDHD2 KR 2019 V1.0Document2 pagesCDHD2 KR 2019 V1.0viptrungkienNo ratings yet
- Technical Description Cat Kor 160704Document6 pagesTechnical Description Cat Kor 160704머신비전No ratings yet
- Battery Charger (Tdc-9030a) ManualDocument15 pagesBattery Charger (Tdc-9030a) Manualauto etrustNo ratings yet
- 부품목록Document3 pages부품목록originalappleNo ratings yet
- 인버터 원리Document14 pages인버터 원리kim minNo ratings yet
- 서지보호기 spd k 1107Document40 pages서지보호기 spd k 1107조성철No ratings yet
- RDS3□30시리즈 (5포트파일럿타입솔레노이드밸브) 직접배관형 190909 (품번원위치)Document8 pagesRDS3□30시리즈 (5포트파일럿타입솔레노이드밸브) 직접배관형 190909 (품번원위치)정재엽No ratings yet
- AT8PSN AT8PMN W Cat 150310Document3 pagesAT8PSN AT8PMN W Cat 150310liser0604shsonNo ratings yet
- 설계04. AD - DA 컨버터 응용 전기회로 설계Document12 pages설계04. AD - DA 컨버터 응용 전기회로 설계댕댕이No ratings yet
- Shinhanelec 22990 ZzltryDocument7 pagesShinhanelec 22990 ZzltryMohammad AbdullahNo ratings yet
- 사용설명서 배전반용디지털집합계기 (KDX-300) 광성계측기 (상세)Document28 pages사용설명서 배전반용디지털집합계기 (KDX-300) 광성계측기 (상세)blackhandNo ratings yet
- EM 계전 VIPAM3500 K 2017Document41 pagesEM 계전 VIPAM3500 K 2017marron66666No ratings yet
- Tob Lance RHDocument9 pagesTob Lance RHazza aghniyaNo ratings yet
- EORC CatalogDocument4 pagesEORC Catalogducnam502No ratings yet
- Rectifier of Ballast Water - 150107 (다원시스)Document6 pagesRectifier of Ballast Water - 150107 (다원시스)Justice KNo ratings yet
- Alt 6400Document14 pagesAlt 6400Jeonghyeon KimNo ratings yet
- InsulationDocument1 pageInsulationRodel PelimianoNo ratings yet
- Eocr Total KR 2014-Press2Document150 pagesEocr Total KR 2014-Press2정정호No ratings yet
- VFD-M 한글메뉴얼 PDFDocument131 pagesVFD-M 한글메뉴얼 PDF조현의No ratings yet
- Sungho SHF 60Document2 pagesSungho SHF 60Nguyễn Quốc KhaNo ratings yet
- Sungho SHF-60Document2 pagesSungho SHF-60Nguyễn Quốc KhaNo ratings yet
- 02.Soft Starter 자료Document13 pages02.Soft Starter 자료rony andrewNo ratings yet
- Cam Switch 02Document70 pagesCam Switch 02Nguyễn Anh TuấnNo ratings yet
- 12. 수소연료전지 특성 측정 2Document23 pages12. 수소연료전지 특성 측정 2김찬우No ratings yet
- 사업계획서 에이스Document15 pages사업계획서 에이스Zephyr ArchangelNo ratings yet
- motrex, 폭스바겐Document47 pagesmotrex, 폭스바겐gilljung730No ratings yet
- 계통전압제어Document66 pages계통전압제어KI OHNo ratings yet
- OZBV Ver 2.0 시리즈 BLDC 드라이버 사용 설명서: Ozsystems OZNO 2011.09.01Document30 pagesOZBV Ver 2.0 시리즈 BLDC 드라이버 사용 설명서: Ozsystems OZNO 2011.09.01TEKNISI FREELANCENo ratings yet
- 실생활 전기전자회로-3주차-자동스위치Document40 pages실생활 전기전자회로-3주차-자동스위치skej sNo ratings yet
- Spac-S9: Sequence Power SupplyDocument4 pagesSpac-S9: Sequence Power Supplytrung nguyenNo ratings yet
- MDA7000 Catalogue (국문)Document5 pagesMDA7000 Catalogue (국문)Esau HernandezNo ratings yet
- DataSheet L12-XXPT-3 Rev1.2Document8 pagesDataSheet L12-XXPT-3 Rev1.2M Ilman NuryakusumahNo ratings yet
- Eocr Eocr-PdmDocument3 pagesEocr Eocr-PdmtalibanindonesiaNo ratings yet
- Sconi SL DSCDocument3 pagesSconi SL DSCfarscapefeatNo ratings yet
- Kasys Relay Socket - KoreaDocument44 pagesKasys Relay Socket - Koreatuanvutt0% (1)
- XGT 특수 - V21 -Document146 pagesXGT 특수 - V21 -sklee0730No ratings yet
- 세기전자정비메뉴얼 (구형) 노랑색Document28 pages세기전자정비메뉴얼 (구형) 노랑색최영진No ratings yet
- VFD-F 한글메뉴얼 PDFDocument142 pagesVFD-F 한글메뉴얼 PDF조현의No ratings yet
- Vse002 05 - Ko KRDocument3 pagesVse002 05 - Ko KRkoths202010807No ratings yet
- 정류기 운영 Manual - - REV01Document24 pages정류기 운영 Manual - - REV01Justice KNo ratings yet
- Mep Villla Da NangDocument37 pagesMep Villla Da NangVõ Thế QuyềnNo ratings yet
- Eocr ArDocument2 pagesEocr ArM25 PatrickNo ratings yet

























































로보스타 - CONTROLLER
로보스타 - CONTROLLER
Uploaded by
choihero3329Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
로보스타 - CONTROLLER
로보스타 - CONTROLLER
Uploaded by
choihero3329Copyright:
Available Formats
Single-Axis Controller
1-Axis Linear Controller Servo Driver
RCS7000D Series 주요 특징
32Bit 고속 DSP를 채용한 고성능 고기능의 AC Servo Drive
최대 0.05um 고분해능의 리니어 엔코더 사용으로 고정밀 제어가 가능
자극 센서가 없는 모터의 Sensorless 제어가 가능
초소형, 초경량 전원 일체형 디자인으로 최상의 시스템 구성이 가능합니다
Model Designation
RCS - 70 01 D - L S N N S
Motor Capa Motor
01 : 100W L : Linear Motor
02 : 200W R : Rotary Motor S : Standard
Single Axis 7000 04 : 400W S : Serial Rotary S : Standard
Drive C : Position N : N Common N : Standard
Robot Controller Series 05 : 500W Motor E : CE
control only
08 : 750W X : Sensorless
10 : 1KW Linear Motor
H
F F
Small Capacity Middle Capacity Small Capacity Middle Capacity
(RCS-7001D~7004D) (RCS-7005D~7010D) (RCS-7001D~7004D) (RCS-7005D~7010D)
Model A B C D E F G H I
RCS-7001D-7004D 199.5 178 73 134 R2.75 R2.75 R2.75 15 30
RCS-7005D-7010D 231.5 210 81 195 R2.75 R2.75 R2.75 15 40
Specifications (기본 사항)
Model RCS-7000D Series
Item 7001D / 7002D 7004D 7005D 7008D 7010D
Input Power 단상 AC220-230V, 50~60Hz 단상/3상 AC220-230V, 50~60Hz
power Power Capa.(KVA) 0.8 1.3 1.5 1.8 2.1
Weight(kg) 1.2 1.4 2.0 2.2 2.4
Regenerative resistor(W/Ω) - 50W / 50Ω 140W / 50Ω 140W / 50Ω 140W / 50Ω
Cooling System Natural Convection Cooling
Control System Sine wave pwm system
Position Feedback Differential line receive (Position, Magnetic pole)
Output Signal Differential line drive
Monitor Accurancy 5μm, 1μm, 0.5μm, 0.1μm, 0.05μm
Monitor output DC 5[V], under 0.3[A]
7-Segment Servo State Display, Alarm, Parameter Editing, Variables Monitoring
Protection Function Over current, Over load, Over voltage, Under voltage, Over speed, Follow error, Encoder error
Protection Available(operation condition settable)
Dymatic Bake
Function
Regenerative Resistor Possible to attach Eternal regenerative resistor for 400W motor
DA Output(option) position / Speed / Torque command and feedback error, etc. (max, ±5V)
1. Linear scale (A, A, B, B) / Incremental Converter with Hall sensor
286 Robostar Product Information
Single-Axis Controller
Series
RM
1-Axis Linear Controller Servo Driver
( Clean )
Series
RM
RCS7000D Series 주요 특징
(Tap 취부)
Series
32Bit 고속 DSP를 채용한 고성능 고기능의 AC Servo Drive
RS
최대 0.05um 고분해능의 리니어 엔코더 사용으로 고정밀 제어가 가능
자극 센서가 없는 모터의 Sensorless 제어가 가능
초소형, 초경량 전원 일체형 디자인으로 최상의 시스템 구성이 가능합니다
( Clean )
Series
RC
Model Designation
(판너트 취부)
RCS - 70 01 D - L S N N S
Series
RJ
Motor Capa Motor
01 : 100W L : Linear Motor
02 : 200W R : Rotary Motor S : Standard
Single Axis 7000 04 : 400W S : Serial Rotary S : Standard
RK Series
Drive C : Position N : N Common N : Standard
Robot Controller Series E : CE
Belt-
05 : 500W Motor control only
08 : 750W X : Sensorless
10 : 1KW Linear Motor
RS Series
Belt-
H
RJ Series
Belt-
ZW Unit
Combina-
F F
Bracket
tion
Small Capacity Middle Capacity Small Capacity Middle Capacity
(RCS-7001D~7004D) (RCS-7005D~7010D) (RCS-7001D~7004D) (RCS-7005D~7010D)
Model A B C D E F G H I
Robot
Linear
RCS-7001D-7004D 199.5 178 73 134 R2.75 R2.75 R2.75 15 30
RCS-7005D-7010D 231.5 210 81 195 R2.75 R2.75 R2.75 15 40
Gantry
Robot
Specifications (기본 사항)
Model RCS-7000D Series
Item 7001D / 7002D 7004D 7005D 7008D 7010D
Stage
Input Power 단상 AC220-230V, 50~60Hz 단상/3상 AC220-230V, 50~60Hz
power Power Capa.(KVA) 0.8 1.3 1.5 1.8 2.1
Weight(kg) 1.2 1.4 2.0 2.2 2.4
SCARA
Robot
Regenerative resistor(W/Ω) - 50W / 50Ω 140W / 50Ω 140W / 50Ω 140W / 50Ω
Cooling System Natural Convection Cooling
Desktop
Control System Sine wave pwm system
Robot
Position Feedback Differential line receive (Position, Magnetic pole)
Output Signal Differential line drive
Monitor Accurancy 5μm, 1μm, 0.5μm, 0.1μm, 0.05μm
Servo
Press
Monitor output DC 5[V], under 0.3[A]
7-Segment Servo State Display, Alarm, Parameter Editing, Variables Monitoring
Parallel
Over current, Over load, Over voltage, Under voltage, Over speed, Follow error, Encoder error
Robot
Protection Function
Protection Available(operation condition settable)
Dymatic Bake
Function
Regenerative Resistor Possible to attach Eternal regenerative resistor for 400W motor
Controller
DA Output(option) position / Speed / Torque command and feedback error, etc. (max, ±5V)
1. Linear scale (A, A, B, B) / Incremental Converter with Hall sensor
Accessory
Global Leader in Robotics & Automation 287
Single-Axis Controller
1 Axis Linear Servo Driver
RCS-7000D Series Wiring Diagram
RCS-7000D
MCCB MCL High voltage stage
AC220~230V L1 U
50/60Hz NF L2 V
EMC SM
*1) L3 W
UNIT
FG
*3)
P *2) r
B t
Regenerative E
discharge
CN2
N B
resistor 18 ENCA C R
15 / ENCA O A
D K
16 ENCB E E
CN1 INPUT 13 / ENCB R
+24VIN 48 14 ENCZ
- + 11 / ENCZ
SVONEN 36
5 ENCU
SPD1/GEAR1 13 6 / ENCU
3 ENCV
SPD2/GEAR2 37 4 / ENCV
1 ENCW
SPD3/MODE 14
2 / ENCW
DIR 38 19 5V
9 0V
LMT+ 16 case
Input signal
LMT - 39
CN1 INPUT
AFLMT 40
7 PAO
ARST/PCLR 18 32 / PAO
6 PBO
ESTP 17 31 / PBO Pulse output
5 PZO
PI/P 15
30 / PZO
STOP/START 41
46
RDY
SREF 27 45
Speed command INPOS / INSPD
(0 to ±10[V]) *4) GND
20
ZSPD
Force command FREF 28 19
BRK
(0 to ±10[V]) *4) GND
47
ALARM
PFIN 9 Output signal
22
/ PFIN 10 ALM1
Command pulse
(Use 250kpps or smaller) PRIN 11 24
ALM2
/ PRIN 12
23
FG 50 ALM3
21
FLMT
Twist pair 43
GND24
Note
*1) Under RCS-7004D is prohibited to use L3 terminal.
*2) For under RCS-7004D, there is no r, t terminal.
*3) It is used only for CE type.
*4) Use one of 1, 3, 8, 26, 34 to use GND terminal.
1. When using the 200V single-phase, use under 400W connected to the L1, L2 terminal.
2. Connect ZNR(DIODE) to each sides of the brake, for brakes other than 24V use external relays.
288 Robostar Product Information
Single-Axis Controller
Series
RM
1-Axis Servo Controller
( Clean )
Series
RM
RCS7000C Series 주요 특징
(Tap 취부)
Series
Full Digital 제어
RS
로봇 프로그램 실행 중 프로그램 및 파라미터 확인 가능
이동 중 위치, 속도, 토크 제어 가능
RS-485 Multipoint 통신운전, CC-link
( Clean )
Series
RC
미쯔비시 PLC에 직접연결하여 PLC I/O공유, PLC Ladder 프로그램에 의한 운전
Model Designation
(판너트 취부)
Series
RCS - 70 01 C - R S N N S
RJ
N : 표준_선택품목 없음
Motor Capa C : CC-Link (V2.0)
01 : 100W I : Incremental F : CC-Link (V3.0)
RK Series
Single Axis 7000 02 : 200W Controller Motor S : Standard N : N Common S : Standard
Belt-
B : Profibus
Robot Controller Series 04 : 400W A : Absolute L : Line Drive P : P Common E : CE
05 : 500W Motor D : DeviceNet
08 : 750W E : EX I/O B/D
P : Pulse Counter
RS Series
Belt-
RJ Series
H
Belt-
ZW Unit
Combina-
Bracket
F F
tion
Small Capacity Middle Capacity CC-LINK CARD installed RTS-9100(A)
(RCS-7001C~7004C) (RCS-7005C~7008C)
Robot
Model A B C D E F G H I
Linear
RCS-7001-7004 199.5 178 73(97) 134 R2.75 R2.75 R2.75 15 30
RCS-7005-7010 231.5 210 81(108) 195 R2.75 R2.75 R2.75 15 40
※( ) CC-Link B/D 부착 시
Gantry
Robot
Specifications (기본 사항)
Model RCS-7000 Series
Item 7001C / 7002C 7004C 7005C 7008C
Stage
Motor(W) 100W / 200W 400W 500W 750W
power 단상 AC220-230V, 50~60Hz 단상/3상 AC 220-230V, 50~60Hz
Power Capacity(KVA) 0.8 0.9 1.1 1.8
SCARA
Robot
Regenerative resistor(W/Ω) - 50W / 50Ω - 140W / 50Ω
Weight(kg) 1.44 1.48 2.34 2.38
Desktop
Encoder Optical Incremental Encoder(15Line, 9Line)
Robot
Programming Teach pendent, PC communication program
I/O Input 16 / Output 16
Program Storage Robot Program 8EA, PLC program 4EA : 1000 Step for each Program
Servo
Press
Protection Function Over Current, Overheat Voltage, Over Load, Following error, IPM error
EMG stop, Line error, Program error, Memory error etc.
Cooling System
Parallel
Natural Convention Cooling
Robot
Running Temp / Humidity 0~45℃, 85%RH (Non-condensing)
Storage Temp / Humidity -15~65℃, 90%RH (Non-condensing)
Controller
Teach Pendant RTS-9100 (AB)
1. Encoder 15Line use Panasonic MINAS AC servo motor Standards, also compatable for Panasonic 10 line type
Accessory
Global Leader in Robotics & Automation 289
Single-Axis Controller
1 Axis Servo Controller
RCS-7000C Wiring Diagram
Single Phase
AC220V RCS-7000C Series
50/60Hz
CN3 SERIAL CN2 ENC
+12V 1 1 W
RxD 2 2 /W
TxD 3 3 V SM
-12V 4 4 /V
ENCODER
GND 5 5 U
EMG 6 6 /U
FG 11 7 -
RDA 12 8 - Brake
RDB 13 9 GND(5V)
BDA 14 10 -
SDB 15 11 /Z
12 SHIELD
13 /B
14 Z
15 /A
16 B
17 -
18 A
19 +5v
20 -
BRAKE / OUTPUT
SYS INPUT INSTALLING <*4> 50 BRAKE+
ROB-RUN 25 BRAKE-
CN1 INPUT 2 / APHASE_OUT
PCL-RUN EMG+ 23
STOP 3 APHASE_OUT
EMG- 48 4 / BPHASE_OUT Encoder
RESET PCOM(ICOM0) 18 27 BPHASE_OUT output
SVON B000 14 28 / CPHASE_OUT
SVOFF B001 39 29 CPHASE_OUT
ORIGIN B002 15 24 PCOM(INCOM0)
STEP B003 40 26 AIN_COM
PGM_SEL B004 16 49 FG
PGM_SEL 0~2 B005 41 1 GND
JOG +/- B006 17 9 NCOM(OUTCOM0)
JOG_SET 0,1 B007 42 5 B030
JOG_MODE PCOM(ICOM1) 43 30 B031
IOPOS 0~7 B010 19 6 B032
B011 44 31 B033
IOSPD 0,1
B012 20 7 B034
CW S/W
B013 45 32 B035
CCW S/W B014 21
ORIGIN S/W 8 B036
B015 46 33 B037
B016 22 34 NCOM(OUTCOM1)
MOVT_ST B017 47 10 B040
SYS OUTPUT INSTALLING 35 B041
ALARM CC-Link CC-LINK(OPTION) 11 B042
READY DA 1 36 B043
Master
ORIGIN_OK DB 2 12 B044
IN_POS DG 3 37 B045
SLD 4 13 B046
ALARM ø~3
FG 5 38 B047
BRAKE
1. When using the 200V single-phase, use under 400W connected to the R, S terminal.
2. Using the RS 232/422 Converter, driving multiple Controllers using RS422 can be driven with a single PC or Controller.
3. Connect ZNR(DIODE) to each sides of the brake, for brakes other than 24V use external relays.
4. SYSTEM I/O must use the user I/O contact points.
5. For PNP type, refer to the diagram in red letters.
290 Robostar Product Information
N1 Controller
Series
RM
N1 Controller Series
( Clean )
Series
RM
(Tap 취부)
Series
RS
System Configuration
CC-link
( Clean )
Cne Profibus
Series
RC
DeviceNet
I/O
(판너트 취부)
Series
RJ
RK Series
Belt-
Teaching Pendant
RS Series
Accessory Feature
Belt-
Standard Part별 모듈화 설계로 착탈이 가능하여 Slot 단위 A/S 가능
1. T/P 더미 19" Rack 타입 설계로 Panel 부착 용이 (일반 4축 기준)
RJ Series
2. 표준 I/O 커넥터 RTOS를 통한 실시간 Multi Tasking 제어
Belt-
(System 1ea, User Input 1ea, User Output 1ea) Full Digital 방식의 Servo 제어 Driver 적용
3. 전원 케이블 Servo 제어용 Process를 별도 적용하여 제어 성능 향상
Option 17Bit Encorder 채용에 따른 위치 정밀도 향상
ZW Unit
1. Teach Pendant 다채널 분리 (로봇2채널+제어용1채널)로 멀티 로봇 구동 가능
2. I/O 단자대, I/O 단자대 케이블 Job, Point 저장 공간 확장 및 안정성 상향
다양한 Fieldbus 채용 (CC-Link, Profibus, Device-Net, Cnet)
Combina-
Bracket
Controller Specification
tion
Item N1 CE N1 KCs
CPU spec 300MHz, 1,800MIPS, 64Bit
Task Processing Method Max 3channel (Robot 2ch + I/O 1ch)
Robot
Linear
Controllable Axis Up to 6 Axis
Control System PTP, CP, ARC, Sealing, Palletizing, Linear, Circular, Semi-PLC
Drive System Digital AC servo / 1 Board : 2 Axis
Max motor capacity per axis 750W (1Kw - under development)
Gantry
Robot
Panasonic A4 Series (Abs) 17Bit, (Inc) 2500PPR, A5 Series (Abs) 17Bit
Controllable Motor
Sewoo Linear Motor, Yaskawa Linear Motor (Under development)
Panasonic, Tamagawa Protocol
Encoder Protocol
LinearDigital Encoder (Under development)
Stage
Program (JOB / Step) 200program / 2000step
Point (Local / Global) 2000point / 1024point
Data Backup Uni-Host
Teaching Method Remote, Direct, MDI
SCARA
Robot
Error Display 7-Segment / Teaching pendant
Protection Function O.C, O.L, O.V, U.V, Position Error, Encoder Error, IPM Error
System + User Input : 24, Output : 12 / Input : 16, Output : 16
Standard I/O
Desktop
Limit±, Origin (Per axis)
Robot
Robot
Position Latch 2ea (Per 2axis)
Communication
RS-232C C-NET, Uni-Host (115200bps)
Interface
Option Slots Digital I/O (Input 64, Output 64),
Servo
Press
(Max 2slots) CC-LINK, DeviceNet, Profibus-dp
Temperature Storage / Running -15~60℃ / 0~45℃
Humidity Storage / Running 10~90% / 20~65% RH less (No condensation)
Safety Category Safety category 1 Safety category 4
Parallel
Robot
Main Single-phase AC 220V(±10%, 50/60Hz)
Power Source Single-phase AC 220V(±10%, 50/60Hz)
Control Single-phase AC 220V(±10%, 50/60Hz)
Degree of Protection IP20 (CE)
Controller
2 axis : 344 X 245 X 183 / 10Kg
Dimension (W X H X D) / Weight 4 axis : 440 X 245 X 183 / 12Kg 4 axis : 583 X 255 X 208 / 12Kg
6 axis : 536 X 245 X 183 / 15Kg 6 axis : 676 X 255 X 208 / 14Kg
Available Robots Cartesian, Scara Robot
Accessory
Global Leader in Robotics & Automation 291
N1 Controller
Controller
2축 CE형
4/6축 CE형
4/6축 KCs형
ROBOT Ordering method
1. Series 2. Motor 3. I/O 4. Option1 5. Option2 6. Case 7. MAIN 8. Power 9. Safety 10. Version
N1 8442XX N C X Q X G C1 S11
1 N1 Series Model 명
S : 50W 1 : 100W 2 : 200W 4 : 400W 8 : 750W
2 8442XX Motor cap acity
A : 1kW B : 2kW C : 2kW D : 3kW E : 5kW
3 N I/O N : NCOM P : PCOM
I : 확장 I/O NCOM C : CCLINK D : DEVICENET
4 C Option1
P : PROFIBUS R : RTEX A : AIO X : 없음
I : 확장 I/O NCOM C : CCLINK D : DEVICENET
5 7X Option2
P : PROFIBUS R : RTEX A : AIO X : 없음
6 Q Case Q : 4축 CASE H : 6축 CASE R : RTEX
7 X Main BD E : ETHERNET U : USB F : ETHERNET+USB X : 없음
8 G Power G : 단일전원 U : 전원분리
9 C1 Safety C1 : 안전등급1 C3 : 안전등급4
10 C1 Version S11 : CE S12 : KCs
Teach Pendant
RTM-9100 Teaching Method
적용 제어기 : N1 Remote Teaching JOG KEY로 목적 위치까지 이동시켜 티칭
지원 언어 : 영어 Direct Teaching : 서보 오프 상태에서 로봇을 손으로 움직여 티칭
오른손 잡이 전용으로 제작 팬던트입니다 MDI(man data input) Teaching : 좌표값을 수치 입력하여 티칭
Teaching 기능
Teaching Point, Integer, Float 편집 및 저장
Job Program, Parameter 편집 및 저장
I/O, Task Monitoring, I/O Output On/Off
292 Robostar Product Information
Accessory
Series
RM
System Diagram & Accessory
( Clean )
Series
RM
(Tap 취부)
Series
RS
System Diagram
( Clean )
GP RTM-9100
Series
PC
RC
(판너트 취부)
Series
RJ
2 Axis Robot
RS 232/422 Converter
RK Series
Belt-
Servo Controller
N1 Seires (2 Axis Controller)
RS Series
Belt-
IO Terminal
RJ Series
Belt-
ZW Unit
Accessory
① ② ③ ④ ⑤
Combina-
Bracket
tion
Robot
Linear
⑥ ⑦ ⑧ ⑨ ⑩
Gantry
Robot
Stage
⑪ ⑫ ⑬
SCARA
Robot
Desktop
Robot
Specifications
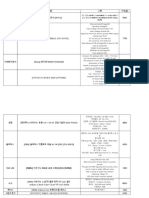
NO Product Description NO Product Description
1 RCS, N1 공용 System I/O Connector 10 BODY HARNESS : 일반 표준 MSMR용
Servo
Press
2 RCS용 I/O Terminal 11 RCS 1축 USER INPUT 19점, OUTPUT 16점(혼합) Connector
3 N1용 System+User I/O Terminal 12 N1용 USER INPUT 16점 Connector
4
Parallel
13
Robot
1축 비가동 케이블 (5M~10M) : RCS-7000C Series용 N1용 USER OUTPUT 16점 Connector
5 1~6축 가동 케이블 (5M~10M) : N1용
6 RS-232 통신 케이블
Controller
7 RCS 1축 TEACH PENDANT : RTS-9100
8 N1_CE형 2/4축 TEACH PENDANT : RTM-9100
9 N1_KCs형 4/6축 TEACH PENDANT : RT6-9000
Accessory
Global Leader in Robotics & Automation 293
You might also like
- Sconi 2250 ADocument2 pagesSconi 2250 A반기서No ratings yet
- 01 Varistor KorDocument29 pages01 Varistor Kor이태규No ratings yet
- 용성Document22 pages용성박건호 (잼디아)No ratings yet
- MS Servo PDFDocument29 pagesMS Servo PDFdae hee hanNo ratings yet
- MD모터사양서V14GDocument77 pagesMD모터사양서V14Gsangwoo jungNo ratings yet
- Neopis Epic-M2500 Kor Cat V2.5Document8 pagesNeopis Epic-M2500 Kor Cat V2.5jundong choNo ratings yet
- Curve จานหมุน Over voltage Type GVO-CD1Document5 pagesCurve จานหมุน Over voltage Type GVO-CD1หนุ่ม วัยทองNo ratings yet
- LS2107PF-LW1152PF - 매뉴얼 - 240513 v2Document8 pagesLS2107PF-LW1152PF - 매뉴얼 - 240513 v2kimgangmin1003No ratings yet
- K-PAM DG3300 사양서 (V2.01)Document72 pagesK-PAM DG3300 사양서 (V2.01)marron66666No ratings yet
- Curve จานหมุน Under Voltage Type GVU-CD1Document4 pagesCurve จานหมุน Under Voltage Type GVU-CD1หนุ่ม วัยทองNo ratings yet
- VS (Ver 4.3) (041-060)Document20 pagesVS (Ver 4.3) (041-060)NikoNo ratings yet
- Tokimec Eha Catalog - 20210209Document10 pagesTokimec Eha Catalog - 20210209박채영No ratings yet
- EM 계전 VIPAM3300-F K-2017Document23 pagesEM 계전 VIPAM3300-F K-2017marron66666No ratings yet
- E50S Cat Kor 160408Document3 pagesE50S Cat Kor 160408머신비전No ratings yet
- 스텝모터원리Document58 pages스텝모터원리jinriNo ratings yet
- (※별첨1.) Dc Acb Catalog Ko 202102Document92 pages(※별첨1.) Dc Acb Catalog Ko 202102LS ELECTRIC INDIANo ratings yet
- CDHD2 KR 2019 V1.0Document2 pagesCDHD2 KR 2019 V1.0viptrungkienNo ratings yet
- Technical Description Cat Kor 160704Document6 pagesTechnical Description Cat Kor 160704머신비전No ratings yet
- Battery Charger (Tdc-9030a) ManualDocument15 pagesBattery Charger (Tdc-9030a) Manualauto etrustNo ratings yet
- 부품목록Document3 pages부품목록originalappleNo ratings yet
- 인버터 원리Document14 pages인버터 원리kim minNo ratings yet
- 서지보호기 spd k 1107Document40 pages서지보호기 spd k 1107조성철No ratings yet
- RDS3□30시리즈 (5포트파일럿타입솔레노이드밸브) 직접배관형 190909 (품번원위치)Document8 pagesRDS3□30시리즈 (5포트파일럿타입솔레노이드밸브) 직접배관형 190909 (품번원위치)정재엽No ratings yet
- AT8PSN AT8PMN W Cat 150310Document3 pagesAT8PSN AT8PMN W Cat 150310liser0604shsonNo ratings yet
- 설계04. AD - DA 컨버터 응용 전기회로 설계Document12 pages설계04. AD - DA 컨버터 응용 전기회로 설계댕댕이No ratings yet
- Shinhanelec 22990 ZzltryDocument7 pagesShinhanelec 22990 ZzltryMohammad AbdullahNo ratings yet
- 사용설명서 배전반용디지털집합계기 (KDX-300) 광성계측기 (상세)Document28 pages사용설명서 배전반용디지털집합계기 (KDX-300) 광성계측기 (상세)blackhandNo ratings yet
- EM 계전 VIPAM3500 K 2017Document41 pagesEM 계전 VIPAM3500 K 2017marron66666No ratings yet
- Tob Lance RHDocument9 pagesTob Lance RHazza aghniyaNo ratings yet
- EORC CatalogDocument4 pagesEORC Catalogducnam502No ratings yet
- Rectifier of Ballast Water - 150107 (다원시스)Document6 pagesRectifier of Ballast Water - 150107 (다원시스)Justice KNo ratings yet
- Alt 6400Document14 pagesAlt 6400Jeonghyeon KimNo ratings yet
- InsulationDocument1 pageInsulationRodel PelimianoNo ratings yet
- Eocr Total KR 2014-Press2Document150 pagesEocr Total KR 2014-Press2정정호No ratings yet
- VFD-M 한글메뉴얼 PDFDocument131 pagesVFD-M 한글메뉴얼 PDF조현의No ratings yet
- Sungho SHF 60Document2 pagesSungho SHF 60Nguyễn Quốc KhaNo ratings yet
- Sungho SHF-60Document2 pagesSungho SHF-60Nguyễn Quốc KhaNo ratings yet
- 02.Soft Starter 자료Document13 pages02.Soft Starter 자료rony andrewNo ratings yet
- Cam Switch 02Document70 pagesCam Switch 02Nguyễn Anh TuấnNo ratings yet
- 12. 수소연료전지 특성 측정 2Document23 pages12. 수소연료전지 특성 측정 2김찬우No ratings yet
- 사업계획서 에이스Document15 pages사업계획서 에이스Zephyr ArchangelNo ratings yet
- motrex, 폭스바겐Document47 pagesmotrex, 폭스바겐gilljung730No ratings yet
- 계통전압제어Document66 pages계통전압제어KI OHNo ratings yet
- OZBV Ver 2.0 시리즈 BLDC 드라이버 사용 설명서: Ozsystems OZNO 2011.09.01Document30 pagesOZBV Ver 2.0 시리즈 BLDC 드라이버 사용 설명서: Ozsystems OZNO 2011.09.01TEKNISI FREELANCENo ratings yet
- 실생활 전기전자회로-3주차-자동스위치Document40 pages실생활 전기전자회로-3주차-자동스위치skej sNo ratings yet
- Spac-S9: Sequence Power SupplyDocument4 pagesSpac-S9: Sequence Power Supplytrung nguyenNo ratings yet
- MDA7000 Catalogue (국문)Document5 pagesMDA7000 Catalogue (국문)Esau HernandezNo ratings yet
- DataSheet L12-XXPT-3 Rev1.2Document8 pagesDataSheet L12-XXPT-3 Rev1.2M Ilman NuryakusumahNo ratings yet
- Eocr Eocr-PdmDocument3 pagesEocr Eocr-PdmtalibanindonesiaNo ratings yet
- Sconi SL DSCDocument3 pagesSconi SL DSCfarscapefeatNo ratings yet
- Kasys Relay Socket - KoreaDocument44 pagesKasys Relay Socket - Koreatuanvutt0% (1)
- XGT 특수 - V21 -Document146 pagesXGT 특수 - V21 -sklee0730No ratings yet
- 세기전자정비메뉴얼 (구형) 노랑색Document28 pages세기전자정비메뉴얼 (구형) 노랑색최영진No ratings yet
- VFD-F 한글메뉴얼 PDFDocument142 pagesVFD-F 한글메뉴얼 PDF조현의No ratings yet
- Vse002 05 - Ko KRDocument3 pagesVse002 05 - Ko KRkoths202010807No ratings yet
- 정류기 운영 Manual - - REV01Document24 pages정류기 운영 Manual - - REV01Justice KNo ratings yet
- Mep Villla Da NangDocument37 pagesMep Villla Da NangVõ Thế QuyềnNo ratings yet
- Eocr ArDocument2 pagesEocr ArM25 PatrickNo ratings yet