Download as pdf or txt
You might also like
- Geo Map WorksheetsDocument31 pagesGeo Map WorksheetsAli DarNo ratings yet
- Africa Map Work SheetsDocument9 pagesAfrica Map Work SheetsjeffNo ratings yet
- TriangleDocument6 pagesTrianglePardeep SinghNo ratings yet
- Hari Bera: Complex Analysis (Complex Analysis: Note-3) Semester-6 Core Course-6-13 UNIT-2Document22 pagesHari Bera: Complex Analysis (Complex Analysis: Note-3) Semester-6 Core Course-6-13 UNIT-2RahulNo ratings yet
- Notes 18 PDFDocument3 pagesNotes 18 PDFJoel DsouzaNo ratings yet
- 0.1 Actual readable stuff: δz δx δz δx δz δy 0 0 0Document2 pages0.1 Actual readable stuff: δz δx δz δx δz δy 0 0 0Kenji NakagawaNo ratings yet
- 8 K4 Exercise 6 (D) : So, JX+) D DyDocument8 pages8 K4 Exercise 6 (D) : So, JX+) D DySubrat BarikNo ratings yet
- Applications of CalculusDocument11 pagesApplications of CalculusSiddharth AcharyaNo ratings yet
- MTH 101-Calculus: Spring-2021 Assignment-12: Line and Surface Integrals, Green's /stokes' /gauss' TheoremsDocument1 pageMTH 101-Calculus: Spring-2021 Assignment-12: Line and Surface Integrals, Green's /stokes' /gauss' TheoremstHEhOODYgANGNo ratings yet
- Introduction To Complex Analysis (Lecture Notes, 2003) ChenDocument194 pagesIntroduction To Complex Analysis (Lecture Notes, 2003) Chenapi-3840623No ratings yet
- MA547 Lecture SummaryDocument21 pagesMA547 Lecture SummaryVikas RajpootNo ratings yet
- Complex Till DiffDocument12 pagesComplex Till Diffvikas rajpootNo ratings yet
- FormulasDocument3 pagesFormulasANSHNo ratings yet
- Multiple View Geometry: Exercise Sheet 8Document3 pagesMultiple View Geometry: Exercise Sheet 8Berkay ÖzerbayNo ratings yet
- gt2 Cuoi Ky CTTT K59Document1 pagegt2 Cuoi Ky CTTT K59Lượng Tử Mèo ConNo ratings yet
- Quiz 1 A SolutionsDocument4 pagesQuiz 1 A SolutionsTamanna 1303No ratings yet
- Classical Fields 3Document3 pagesClassical Fields 3Jonathan SanchezNo ratings yet
- Chapter 3: Application of First-Order deDocument7 pagesChapter 3: Application of First-Order deouo9999No ratings yet
- Student Assignment - Part ADocument3 pagesStudent Assignment - Part Ar8jrmfhxmnNo ratings yet
- Exact Deconvolution Using Number-Theoretic Transforms: Comput. Math. ApplicDocument12 pagesExact Deconvolution Using Number-Theoretic Transforms: Comput. Math. ApplicLovinf FlorinNo ratings yet
- FA Chap1 1-4Document4 pagesFA Chap1 1-4ThangNo ratings yet
- Moments of InertiaDocument10 pagesMoments of InertiaHosea MuchiriNo ratings yet
- An Expansion For XDocument2 pagesAn Expansion For XErivelton VitorNo ratings yet
- Integral TablesDocument3 pagesIntegral TablesStefan KyurkchievNo ratings yet
- Metric Space and Norm Linear Space Important QuestionsDocument3 pagesMetric Space and Norm Linear Space Important QuestionsP GOSWAMINo ratings yet
- Introduction To Complex Analysis: WwlchenDocument4 pagesIntroduction To Complex Analysis: WwlchendumpscribdNo ratings yet
- Notes - Basic AnalysisDocument73 pagesNotes - Basic AnalysisMhai MabantaNo ratings yet
- MATH2023 Multivariable Calculus 2019/20: Homework 8Document2 pagesMATH2023 Multivariable Calculus 2019/20: Homework 8物理系小薯No ratings yet
- Transport Phenomena Chapter 2Document37 pagesTransport Phenomena Chapter 2Necati KeskinNo ratings yet
- L19Document12 pagesL19kienkienNo ratings yet
- Enrichment Lectures 2010 Some Facts and Problems About PolynomialsDocument32 pagesEnrichment Lectures 2010 Some Facts and Problems About PolynomialsVinay MishraNo ratings yet
- Exam 2020Document2 pagesExam 2020Abdellatif denineNo ratings yet
- Unit 2 MathsDocument34 pagesUnit 2 MathsHero NumberNo ratings yet
- Metric Spaces: 1.1 Definition and ExamplesDocument103 pagesMetric Spaces: 1.1 Definition and ExamplesNguyễn Quang HuyNo ratings yet
- Integrale PDFDocument2 pagesIntegrale PDFMihnea VrabieNo ratings yet
- Kumbojkar Triple IntegralsDocument23 pagesKumbojkar Triple Integralsaditya.sschNo ratings yet
- 6 Line Integrals NotesDocument7 pages6 Line Integrals NotesSafdar AbbasNo ratings yet
- Viewing AngleDocument3 pagesViewing AnglesrconstantinNo ratings yet
- Spring 2005 SolutionsDocument11 pagesSpring 2005 SolutionsÖzge TüncelNo ratings yet
- Analele S Tiint Ifice Ale Universit AT Ii "Al.I.Cuza" Ias I Tomul XLVI, S.I A, Matematic A, 2000, f.1Document22 pagesAnalele S Tiint Ifice Ale Universit AT Ii "Al.I.Cuza" Ias I Tomul XLVI, S.I A, Matematic A, 2000, f.1Safoora ElienNo ratings yet
- 718-Article Text-1315-4-10-20230520Document11 pages718-Article Text-1315-4-10-20230520güldenizNo ratings yet
- Advanced Technology M7 "Fields and Waves" Vector Field TheoryDocument8 pagesAdvanced Technology M7 "Fields and Waves" Vector Field TheorysFDfdsNo ratings yet
- X+y Xy 2 2 2 2 2 2Document4 pagesX+y Xy 2 2 2 2 2 2NGET SenghuochNo ratings yet
- Orbits in Central Force Fields I: F (r) ρ (r) (r, θ) = F (r) ~ eDocument24 pagesOrbits in Central Force Fields I: F (r) ρ (r) (r, θ) = F (r) ~ eगणित विषयNo ratings yet
- Unit 2Document39 pagesUnit 2ravi2692kumarNo ratings yet
- PH108 - Electricity and Magnetism: Lecture - 2Document23 pagesPH108 - Electricity and Magnetism: Lecture - 2amar BaroniaNo ratings yet
- Math 55 1st Exam ReviewerDocument2 pagesMath 55 1st Exam ReviewerTidal SurgesNo ratings yet
- MA111 Lec7 D3D4Document20 pagesMA111 Lec7 D3D4pahnhnykNo ratings yet
- 3 Contour Integrals and Cauchy's Theorem: 3.1 Line Integrals of Complex FunctionsDocument13 pages3 Contour Integrals and Cauchy's Theorem: 3.1 Line Integrals of Complex FunctionsMudassar KhalidNo ratings yet
- Mass Problem.: M Lim X F (X, Y, Z) S F (X, Y, Z) DsDocument30 pagesMass Problem.: M Lim X F (X, Y, Z) S F (X, Y, Z) Dsmissbluhera58No ratings yet
- Mathematics 1c: Solutions, Homework Set 8Document4 pagesMathematics 1c: Solutions, Homework Set 8alteru4No ratings yet
- Complex Analysis - Chapter 4 IntegralsDocument68 pagesComplex Analysis - Chapter 4 IntegralsSheena GuptaNo ratings yet
- Height and PeriodDocument4 pagesHeight and Periody86tksrnc8No ratings yet
- Adobe Scan Dec 30, 2023Document19 pagesAdobe Scan Dec 30, 2023ayesha sheikhNo ratings yet
- 2 Digression: Differential Calculus On R: N N 1 X X DX X DX 1+x DX 2 XDocument4 pages2 Digression: Differential Calculus On R: N N 1 X X DX X DX 1+x DX 2 XGag PafNo ratings yet
- Vaex0 1617 PDFDocument1 pageVaex0 1617 PDFAnonymous WIJBwbEY6ONo ratings yet
- Vaex0 1617 PDFDocument1 pageVaex0 1617 PDFNathan HindesNo ratings yet
- The Residue Theorem and Its ApplicationsDocument10 pagesThe Residue Theorem and Its ApplicationsChenduran PillaiNo ratings yet
- Advanced Mathematics Tut 2Document4 pagesAdvanced Mathematics Tut 2hktang1802No ratings yet
- Math032 12 03 151Document10 pagesMath032 12 03 151we_spidus_2006No ratings yet
- Direct Numerical Simulation of An Airfoil With Unsteady Wake (Eccomas 2006)Document18 pagesDirect Numerical Simulation of An Airfoil With Unsteady Wake (Eccomas 2006)kiranhegde75No ratings yet
- IELTS Listening - Additional Practice Audio TranscriptDocument21 pagesIELTS Listening - Additional Practice Audio Transcriptilmi0% (1)
- Surveying Two CH - TWODocument41 pagesSurveying Two CH - TWOsyumteame15161993No ratings yet
- Fill F!i!!j Jii!!jil!: Direct Statement ScaleDocument4 pagesFill F!i!!j Jii!!jil!: Direct Statement ScaleBjorn RagnarNo ratings yet
- ECDIS LimitationsDocument24 pagesECDIS LimitationsMariner's CircleNo ratings yet
- Digital Terrain Analysis in A GIS Environment. Concepts and DevelopmentDocument2 pagesDigital Terrain Analysis in A GIS Environment. Concepts and Developmentfox wolfNo ratings yet
- Sangamo TimerDocument12 pagesSangamo TimerAmil KariemNo ratings yet
- Living On Luck The Story Behind Zagora S WatermelonsDocument19 pagesLiving On Luck The Story Behind Zagora S WatermelonsChaymae SahraouiNo ratings yet
- Lesson Plan Volcanoes and Earthquakes GeographyDocument2 pagesLesson Plan Volcanoes and Earthquakes GeographyetwinningNo ratings yet
- Teacher's BookDocument160 pagesTeacher's BookShahab KurdiNo ratings yet
- Climate Change Scheme of Work For KS2Document13 pagesClimate Change Scheme of Work For KS2Zoe AlsumaitNo ratings yet
- Master Thesis Julian Janocha Modelling LimestoneDocument128 pagesMaster Thesis Julian Janocha Modelling LimestoneindraNo ratings yet
- Cooum RiverDocument235 pagesCooum RiverSuma ManthaNo ratings yet
- Lab 1 - Topographic MapsDocument6 pagesLab 1 - Topographic MapsGil Gamesh100% (1)
- Physical and Political Divisions Of: TOP Mcqs OnDocument58 pagesPhysical and Political Divisions Of: TOP Mcqs OnRouful RasoolNo ratings yet
- Class XI 2Document90 pagesClass XI 2Atul KumarNo ratings yet
- PMA Important World Record MCQDocument10 pagesPMA Important World Record MCQMuhammad ZohaibNo ratings yet
- Earth's Features: Cosmic Reading PassagesDocument7 pagesEarth's Features: Cosmic Reading PassagesBiancaNo ratings yet
- Hamlet (Place) - WikipediaDocument12 pagesHamlet (Place) - Wikipediafoxmulder467No ratings yet
- Continents in The SandDocument3 pagesContinents in The SandFranzeine De GuzmanNo ratings yet
- SCP Cartography Ge102Document150 pagesSCP Cartography Ge102Denver Obando RegidorNo ratings yet
- JPMagpantay ENSC 50 GIS and RS Presentation 1Document57 pagesJPMagpantay ENSC 50 GIS and RS Presentation 1SchneeNo ratings yet
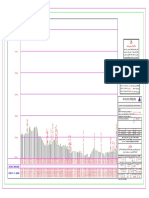
- Plan ProfileDocument9 pagesPlan ProfileSinaNo ratings yet
- Char Dham ProjectDocument1 pageChar Dham ProjectkishoresutradharNo ratings yet
- Aircom Coverage Maps: February 2009Document30 pagesAircom Coverage Maps: February 2009kiemtvNo ratings yet
- 11 Geography Notes 01 Geography As A DisciplineDocument4 pages11 Geography Notes 01 Geography As A DisciplineAkash100% (3)
- STAGE 3 GEOGRAPHY: Why Live Where?: Focus Area: Factors That Shape PlacesDocument5 pagesSTAGE 3 GEOGRAPHY: Why Live Where?: Focus Area: Factors That Shape PlacesceciNo ratings yet
- TOURGUIDINGDocument1 pageTOURGUIDINGJohn Niño RosaritoNo ratings yet
- May 22,,2023Document9 pagesMay 22,,2023NoEymee Rotcheyy MegabonNo ratings yet