
06-Rotating Machinery Protection
06-Rotating Machinery Protection
You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 4 out of 5 stars4/5 (2)
- ELX303 Exam SolutionsDocument27 pagesELX303 Exam SolutionsNadeesha BandaraNo ratings yet
- Chapter 7Document62 pagesChapter 7alhajriaxNo ratings yet
- Application Note Protection ClassDocument5 pagesApplication Note Protection ClassshuwingNo ratings yet
- Power System Lab Exp 3Document3 pagesPower System Lab Exp 3Riya PrajapatiNo ratings yet
- Power System ProtectionDocument4 pagesPower System Protectionmarinjay03No ratings yet
- Chapter 7. Transformer and Bus Bar Protection: External Faults Internal Faul External FaultsDocument32 pagesChapter 7. Transformer and Bus Bar Protection: External Faults Internal Faul External FaultsBio DebatarajaNo ratings yet
- Short Circuit CalculationDocument41 pagesShort Circuit CalculationWilliamNo ratings yet
- Protection RelaysDocument87 pagesProtection Relaysmoosuhaib100% (1)
- Protection Systems TransformerDocument14 pagesProtection Systems Transformerrajabharath12No ratings yet
- AC Generator and Motor ProtectionDocument76 pagesAC Generator and Motor ProtectionAtif Husayn100% (1)
- Short Circuit CalculationsDocument13 pagesShort Circuit CalculationsAmr EidNo ratings yet
- Protection CTsDocument5 pagesProtection CTscsontosbaluNo ratings yet
- INSTRUMNT AssignmentDocument7 pagesINSTRUMNT AssignmentShahab HassanNo ratings yet
- Lecture 06 - Protective Relay PDFDocument25 pagesLecture 06 - Protective Relay PDFEmdadul Hoq Rakib100% (1)
- Motor Protection ApplicationDocument27 pagesMotor Protection ApplicationMoulod MouloudNo ratings yet
- Further Electrical PowerDocument18 pagesFurther Electrical PowerzzyyeeNo ratings yet
- Protection Principles and ComponentsDocument57 pagesProtection Principles and Componentsyibelta abebeNo ratings yet
- Deepa S Kumar Powergrid Corporation of India LTDDocument44 pagesDeepa S Kumar Powergrid Corporation of India LTDiam@scribd123No ratings yet
- The Importance of Overcurrent ProtectionDocument9 pagesThe Importance of Overcurrent ProtectionR Is100% (1)
- 7PG1903 B3 Catalogue Sheet PDFDocument5 pages7PG1903 B3 Catalogue Sheet PDFAhmed HussainNo ratings yet
- Overcurrent Protection For Phase and Earth FaultsDocument30 pagesOvercurrent Protection For Phase and Earth Faultshossein2012100% (1)
- Specification of CTS:: Saturated Values of Rated Burden AreDocument25 pagesSpecification of CTS:: Saturated Values of Rated Burden ArePranendu MaitiNo ratings yet
- Short Circuit Calculation Short CircuitDocument41 pagesShort Circuit Calculation Short Circuitsanu1985No ratings yet
- Merlin Gerin Medium VoltageDocument10 pagesMerlin Gerin Medium VoltagekjfenNo ratings yet
- OC EF RLY SET Chap9-122-151Document30 pagesOC EF RLY SET Chap9-122-151Falulus SalamNo ratings yet
- Tnstrument Transformers (CT, PT) TheoryDocument6 pagesTnstrument Transformers (CT, PT) TheorySARAVANANo ratings yet
- CoordinationDocument18 pagesCoordinationKhaled Galal AhmedNo ratings yet
- (2 2) Short Circuit CalculationDocument38 pages(2 2) Short Circuit CalculationElectro Tractrix100% (1)
- Short Circuit CalculationsDocument10 pagesShort Circuit CalculationsvenkateshbitraNo ratings yet
- 87 CT Class ExplanationDocument11 pages87 CT Class ExplanationdskymaximusNo ratings yet
- Generatorprotectionbybhushankumbhalkar 140404234822 Phpapp02Document56 pagesGeneratorprotectionbybhushankumbhalkar 140404234822 Phpapp02umamaheshwarrao100% (1)
- EET414 Chapter 5Document46 pagesEET414 Chapter 5Lee Boon HongNo ratings yet
- CT and VTDocument32 pagesCT and VTSamarendu BaulNo ratings yet
- EE482 - Topic - 1 5 Transformer ProtectionDocument57 pagesEE482 - Topic - 1 5 Transformer ProtectionMaycon MaranNo ratings yet
- ENG451 - 6 - Power System ProtectionDocument31 pagesENG451 - 6 - Power System ProtectionSM FerdousNo ratings yet
- Current Transformer 1Document33 pagesCurrent Transformer 1Noli Oteba100% (1)
- Ch4 Differential Protection 2022Document117 pagesCh4 Differential Protection 2022harini deviNo ratings yet
- Protection Revision Notes:, T T T E E T + + × +Document2 pagesProtection Revision Notes:, T T T E E T + + × +Amal PirzadaNo ratings yet
- 07 Current Transformer Applications#Document9 pages07 Current Transformer Applications#aimizaNo ratings yet
- Assignment-Iv: (I) Operating Time of Feeder RelayDocument4 pagesAssignment-Iv: (I) Operating Time of Feeder RelayPrasenjit Dey100% (1)
- Power Systems Protection Course: Al-Balqa Applied UniversityDocument28 pagesPower Systems Protection Course: Al-Balqa Applied UniversityPIOS CHICKENNo ratings yet
- Protection of BusesDocument9 pagesProtection of BusesAmr EidNo ratings yet
- Power System Protection Lecture 4 AnnotatedDocument19 pagesPower System Protection Lecture 4 AnnotatedJABERNo ratings yet
- CBCTDocument14 pagesCBCTYPV TECHNICAL SERVICES100% (1)
- Differential Protection of 3 Phase Induction MotorsDocument15 pagesDifferential Protection of 3 Phase Induction Motorsoohcky100% (2)
- Chapter 5. Protection RelayDocument56 pagesChapter 5. Protection RelayBio Debataraja100% (1)
- Calculations of Short Circuit CurrentsDocument9 pagesCalculations of Short Circuit CurrentsCorneliusmusyokaNo ratings yet
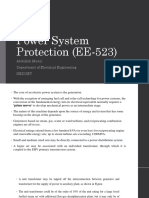
- Power System Protection (EE-523) : Abdullah Munir Department of Electrical Engineering NeduetDocument29 pagesPower System Protection (EE-523) : Abdullah Munir Department of Electrical Engineering NeduetJalees100% (1)
- 10b PROT401 Solution TransformerOCProtection r5Document10 pages10b PROT401 Solution TransformerOCProtection r5Hiramm NavaNo ratings yet
- Applying CTs in Protection Schemes For Transformers, Generators, MachinesDocument10 pagesApplying CTs in Protection Schemes For Transformers, Generators, MachinesrajeshNo ratings yet
- Low Impedance Restricted Earth Fault ProtectionDocument4 pagesLow Impedance Restricted Earth Fault ProtectionGary_Tan_Kai_S_9974100% (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Boat Maintenance Companions: Electrics & Diesel Companions at SeaFrom EverandBoat Maintenance Companions: Electrics & Diesel Companions at SeaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Air-Conditioning System: Design ManualDocument19 pagesAir-Conditioning System: Design ManualZulfah Nurkholis100% (1)
- Rheem Ambiheat HDc270 Heat Pump Datasheet July 2023Document2 pagesRheem Ambiheat HDc270 Heat Pump Datasheet July 2023Mohammad ZeeshanNo ratings yet
- Paragraph WritingDocument2 pagesParagraph WritinglkmkmlkNo ratings yet
- 10 RSPP 01 - PartsDocument33 pages10 RSPP 01 - PartsmarcoNo ratings yet
- BMW Special Price 04022021Document354 pagesBMW Special Price 04022021rvt5tcg97hNo ratings yet
- Evaporators: Nimish ShahDocument29 pagesEvaporators: Nimish ShahFaisal IjazNo ratings yet
- e12-Tnpt-02-Hoang Thi Le-40 de Thi TN Khach Quan (Nguyen Chi Thanh)Document194 pagese12-Tnpt-02-Hoang Thi Le-40 de Thi TN Khach Quan (Nguyen Chi Thanh)Windy KazeNo ratings yet
- General Physics 2Document5 pagesGeneral Physics 2Nanzkie Andrei SamanNo ratings yet
- 2451-Article Text-10002-1-10-20190222Document14 pages2451-Article Text-10002-1-10-20190222omaro1966No ratings yet
- What Is Kigali AgreementDocument3 pagesWhat Is Kigali AgreementDebrup GhoshNo ratings yet
- FTX600 FeconDocument270 pagesFTX600 FeconRodrigo Colussi100% (1)
- USA Chapters 07 08 15 LongDocument4 pagesUSA Chapters 07 08 15 LongFernan MacusiNo ratings yet
- Electricity Circuits)Document33 pagesElectricity Circuits)Princess de VeraNo ratings yet
- Leroy Dmello 2022 Updated Resume.Document5 pagesLeroy Dmello 2022 Updated Resume.LeroyNo ratings yet
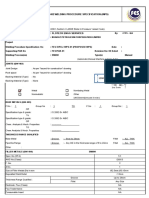
- QW - 482 Welding Procedure Specification (WPS)Document5 pagesQW - 482 Welding Procedure Specification (WPS)Arijit GhoshNo ratings yet
- DAF PACCAR MX-11 EnginesDocument4 pagesDAF PACCAR MX-11 EnginesDusan DimitrijevicNo ratings yet
- PW BRO WireSense ENDocument4 pagesPW BRO WireSense ENVăn Phương NguyễnNo ratings yet
- Pneumatic SchematicsDocument15 pagesPneumatic SchematicsAhmad HamoudaNo ratings yet
- Pre-Check List For Diedel EnginesDocument2 pagesPre-Check List For Diedel EnginesAHMADNo ratings yet
- Knife Gate Valve Testing Procedure Rev. 2Document2 pagesKnife Gate Valve Testing Procedure Rev. 2mehtahemalNo ratings yet
- Ship Staff Training Matrix For Indian Seafarers Aug 2023Document1 pageShip Staff Training Matrix For Indian Seafarers Aug 2023Naveen ChhikaraNo ratings yet
- Well Cost EstimationDocument20 pagesWell Cost Estimationkeen dela cruzNo ratings yet
- ATTEMPERATIONDocument13 pagesATTEMPERATIONRajashekarBheemaNo ratings yet
- Fuels and Combustion: Engr. Alexis T. Belonio, MS Agricultural and Biosystems Engineer ASEAN EngineerDocument23 pagesFuels and Combustion: Engr. Alexis T. Belonio, MS Agricultural and Biosystems Engineer ASEAN EngineerMAPANAO RONALYN B.No ratings yet
- Operational Instruction: Reolink Argus 2/argus ProDocument44 pagesOperational Instruction: Reolink Argus 2/argus ProrfffffNo ratings yet
- 4.03 Petrochemical and Offshore - Astm D 1500 ColourDocument2 pages4.03 Petrochemical and Offshore - Astm D 1500 ColourEdgar100% (1)
- Commissioning Report Generator - SAMPLEDocument5 pagesCommissioning Report Generator - SAMPLEMax JohnNo ratings yet
- State PCS CA Consolidation (Bihar) August 2023Document16 pagesState PCS CA Consolidation (Bihar) August 2023Golu KumarNo ratings yet
- Advanced Papers From 2020 To 2007Document796 pagesAdvanced Papers From 2020 To 2007Lekha HarshaaNo ratings yet
- Katalog Erico System 1000Document12 pagesKatalog Erico System 1000mei pNo ratings yet
























































































Download as pdf or txt
You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 4 out of 5 stars4/5 (2)
- ELX303 Exam SolutionsDocument27 pagesELX303 Exam SolutionsNadeesha BandaraNo ratings yet
- Chapter 7Document62 pagesChapter 7alhajriaxNo ratings yet
- Application Note Protection ClassDocument5 pagesApplication Note Protection ClassshuwingNo ratings yet
- Power System Lab Exp 3Document3 pagesPower System Lab Exp 3Riya PrajapatiNo ratings yet
- Power System ProtectionDocument4 pagesPower System Protectionmarinjay03No ratings yet
- Chapter 7. Transformer and Bus Bar Protection: External Faults Internal Faul External FaultsDocument32 pagesChapter 7. Transformer and Bus Bar Protection: External Faults Internal Faul External FaultsBio DebatarajaNo ratings yet
- Short Circuit CalculationDocument41 pagesShort Circuit CalculationWilliamNo ratings yet
- Protection RelaysDocument87 pagesProtection Relaysmoosuhaib100% (1)
- Protection Systems TransformerDocument14 pagesProtection Systems Transformerrajabharath12No ratings yet
- AC Generator and Motor ProtectionDocument76 pagesAC Generator and Motor ProtectionAtif Husayn100% (1)
- Short Circuit CalculationsDocument13 pagesShort Circuit CalculationsAmr EidNo ratings yet
- Protection CTsDocument5 pagesProtection CTscsontosbaluNo ratings yet
- INSTRUMNT AssignmentDocument7 pagesINSTRUMNT AssignmentShahab HassanNo ratings yet
- Lecture 06 - Protective Relay PDFDocument25 pagesLecture 06 - Protective Relay PDFEmdadul Hoq Rakib100% (1)
- Motor Protection ApplicationDocument27 pagesMotor Protection ApplicationMoulod MouloudNo ratings yet
- Further Electrical PowerDocument18 pagesFurther Electrical PowerzzyyeeNo ratings yet
- Protection Principles and ComponentsDocument57 pagesProtection Principles and Componentsyibelta abebeNo ratings yet
- Deepa S Kumar Powergrid Corporation of India LTDDocument44 pagesDeepa S Kumar Powergrid Corporation of India LTDiam@scribd123No ratings yet
- The Importance of Overcurrent ProtectionDocument9 pagesThe Importance of Overcurrent ProtectionR Is100% (1)
- 7PG1903 B3 Catalogue Sheet PDFDocument5 pages7PG1903 B3 Catalogue Sheet PDFAhmed HussainNo ratings yet
- Overcurrent Protection For Phase and Earth FaultsDocument30 pagesOvercurrent Protection For Phase and Earth Faultshossein2012100% (1)
- Specification of CTS:: Saturated Values of Rated Burden AreDocument25 pagesSpecification of CTS:: Saturated Values of Rated Burden ArePranendu MaitiNo ratings yet
- Short Circuit Calculation Short CircuitDocument41 pagesShort Circuit Calculation Short Circuitsanu1985No ratings yet
- Merlin Gerin Medium VoltageDocument10 pagesMerlin Gerin Medium VoltagekjfenNo ratings yet
- OC EF RLY SET Chap9-122-151Document30 pagesOC EF RLY SET Chap9-122-151Falulus SalamNo ratings yet
- Tnstrument Transformers (CT, PT) TheoryDocument6 pagesTnstrument Transformers (CT, PT) TheorySARAVANANo ratings yet
- CoordinationDocument18 pagesCoordinationKhaled Galal AhmedNo ratings yet
- (2 2) Short Circuit CalculationDocument38 pages(2 2) Short Circuit CalculationElectro Tractrix100% (1)
- Short Circuit CalculationsDocument10 pagesShort Circuit CalculationsvenkateshbitraNo ratings yet
- 87 CT Class ExplanationDocument11 pages87 CT Class ExplanationdskymaximusNo ratings yet
- Generatorprotectionbybhushankumbhalkar 140404234822 Phpapp02Document56 pagesGeneratorprotectionbybhushankumbhalkar 140404234822 Phpapp02umamaheshwarrao100% (1)
- EET414 Chapter 5Document46 pagesEET414 Chapter 5Lee Boon HongNo ratings yet
- CT and VTDocument32 pagesCT and VTSamarendu BaulNo ratings yet
- EE482 - Topic - 1 5 Transformer ProtectionDocument57 pagesEE482 - Topic - 1 5 Transformer ProtectionMaycon MaranNo ratings yet
- ENG451 - 6 - Power System ProtectionDocument31 pagesENG451 - 6 - Power System ProtectionSM FerdousNo ratings yet
- Current Transformer 1Document33 pagesCurrent Transformer 1Noli Oteba100% (1)
- Ch4 Differential Protection 2022Document117 pagesCh4 Differential Protection 2022harini deviNo ratings yet
- Protection Revision Notes:, T T T E E T + + × +Document2 pagesProtection Revision Notes:, T T T E E T + + × +Amal PirzadaNo ratings yet
- 07 Current Transformer Applications#Document9 pages07 Current Transformer Applications#aimizaNo ratings yet
- Assignment-Iv: (I) Operating Time of Feeder RelayDocument4 pagesAssignment-Iv: (I) Operating Time of Feeder RelayPrasenjit Dey100% (1)
- Power Systems Protection Course: Al-Balqa Applied UniversityDocument28 pagesPower Systems Protection Course: Al-Balqa Applied UniversityPIOS CHICKENNo ratings yet
- Protection of BusesDocument9 pagesProtection of BusesAmr EidNo ratings yet
- Power System Protection Lecture 4 AnnotatedDocument19 pagesPower System Protection Lecture 4 AnnotatedJABERNo ratings yet
- CBCTDocument14 pagesCBCTYPV TECHNICAL SERVICES100% (1)
- Differential Protection of 3 Phase Induction MotorsDocument15 pagesDifferential Protection of 3 Phase Induction Motorsoohcky100% (2)
- Chapter 5. Protection RelayDocument56 pagesChapter 5. Protection RelayBio Debataraja100% (1)
- Calculations of Short Circuit CurrentsDocument9 pagesCalculations of Short Circuit CurrentsCorneliusmusyokaNo ratings yet
- Power System Protection (EE-523) : Abdullah Munir Department of Electrical Engineering NeduetDocument29 pagesPower System Protection (EE-523) : Abdullah Munir Department of Electrical Engineering NeduetJalees100% (1)
- 10b PROT401 Solution TransformerOCProtection r5Document10 pages10b PROT401 Solution TransformerOCProtection r5Hiramm NavaNo ratings yet
- Applying CTs in Protection Schemes For Transformers, Generators, MachinesDocument10 pagesApplying CTs in Protection Schemes For Transformers, Generators, MachinesrajeshNo ratings yet
- Low Impedance Restricted Earth Fault ProtectionDocument4 pagesLow Impedance Restricted Earth Fault ProtectionGary_Tan_Kai_S_9974100% (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Boat Maintenance Companions: Electrics & Diesel Companions at SeaFrom EverandBoat Maintenance Companions: Electrics & Diesel Companions at SeaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Air-Conditioning System: Design ManualDocument19 pagesAir-Conditioning System: Design ManualZulfah Nurkholis100% (1)
- Rheem Ambiheat HDc270 Heat Pump Datasheet July 2023Document2 pagesRheem Ambiheat HDc270 Heat Pump Datasheet July 2023Mohammad ZeeshanNo ratings yet
- Paragraph WritingDocument2 pagesParagraph WritinglkmkmlkNo ratings yet
- 10 RSPP 01 - PartsDocument33 pages10 RSPP 01 - PartsmarcoNo ratings yet
- BMW Special Price 04022021Document354 pagesBMW Special Price 04022021rvt5tcg97hNo ratings yet
- Evaporators: Nimish ShahDocument29 pagesEvaporators: Nimish ShahFaisal IjazNo ratings yet
- e12-Tnpt-02-Hoang Thi Le-40 de Thi TN Khach Quan (Nguyen Chi Thanh)Document194 pagese12-Tnpt-02-Hoang Thi Le-40 de Thi TN Khach Quan (Nguyen Chi Thanh)Windy KazeNo ratings yet
- General Physics 2Document5 pagesGeneral Physics 2Nanzkie Andrei SamanNo ratings yet
- 2451-Article Text-10002-1-10-20190222Document14 pages2451-Article Text-10002-1-10-20190222omaro1966No ratings yet
- What Is Kigali AgreementDocument3 pagesWhat Is Kigali AgreementDebrup GhoshNo ratings yet
- FTX600 FeconDocument270 pagesFTX600 FeconRodrigo Colussi100% (1)
- USA Chapters 07 08 15 LongDocument4 pagesUSA Chapters 07 08 15 LongFernan MacusiNo ratings yet
- Electricity Circuits)Document33 pagesElectricity Circuits)Princess de VeraNo ratings yet
- Leroy Dmello 2022 Updated Resume.Document5 pagesLeroy Dmello 2022 Updated Resume.LeroyNo ratings yet
- QW - 482 Welding Procedure Specification (WPS)Document5 pagesQW - 482 Welding Procedure Specification (WPS)Arijit GhoshNo ratings yet
- DAF PACCAR MX-11 EnginesDocument4 pagesDAF PACCAR MX-11 EnginesDusan DimitrijevicNo ratings yet
- PW BRO WireSense ENDocument4 pagesPW BRO WireSense ENVăn Phương NguyễnNo ratings yet
- Pneumatic SchematicsDocument15 pagesPneumatic SchematicsAhmad HamoudaNo ratings yet
- Pre-Check List For Diedel EnginesDocument2 pagesPre-Check List For Diedel EnginesAHMADNo ratings yet
- Knife Gate Valve Testing Procedure Rev. 2Document2 pagesKnife Gate Valve Testing Procedure Rev. 2mehtahemalNo ratings yet
- Ship Staff Training Matrix For Indian Seafarers Aug 2023Document1 pageShip Staff Training Matrix For Indian Seafarers Aug 2023Naveen ChhikaraNo ratings yet
- Well Cost EstimationDocument20 pagesWell Cost Estimationkeen dela cruzNo ratings yet
- ATTEMPERATIONDocument13 pagesATTEMPERATIONRajashekarBheemaNo ratings yet
- Fuels and Combustion: Engr. Alexis T. Belonio, MS Agricultural and Biosystems Engineer ASEAN EngineerDocument23 pagesFuels and Combustion: Engr. Alexis T. Belonio, MS Agricultural and Biosystems Engineer ASEAN EngineerMAPANAO RONALYN B.No ratings yet
- Operational Instruction: Reolink Argus 2/argus ProDocument44 pagesOperational Instruction: Reolink Argus 2/argus ProrfffffNo ratings yet
- 4.03 Petrochemical and Offshore - Astm D 1500 ColourDocument2 pages4.03 Petrochemical and Offshore - Astm D 1500 ColourEdgar100% (1)
- Commissioning Report Generator - SAMPLEDocument5 pagesCommissioning Report Generator - SAMPLEMax JohnNo ratings yet
- State PCS CA Consolidation (Bihar) August 2023Document16 pagesState PCS CA Consolidation (Bihar) August 2023Golu KumarNo ratings yet
- Advanced Papers From 2020 To 2007Document796 pagesAdvanced Papers From 2020 To 2007Lekha HarshaaNo ratings yet
- Katalog Erico System 1000Document12 pagesKatalog Erico System 1000mei pNo ratings yet