
Stepper Motor Interfacing With 8051 MC
Stepper Motor Interfacing With 8051 MC
You might also like
- 312C - Esquema EletricoDocument2 pages312C - Esquema EletricoMarco OlivettoNo ratings yet
- 2W Switch Catalog 2022 LRDocument124 pages2W Switch Catalog 2022 LRRamkinkar Guru100% (1)
- Digital Lab Report 3Document8 pagesDigital Lab Report 3علي عليNo ratings yet
- HOLGAGONDocument8 pagesHOLGAGONRisky HidayatNo ratings yet
- 8051 Lab Stepper Motor InterfacingDocument5 pages8051 Lab Stepper Motor InterfacingGirish ChapleNo ratings yet
- Exp 7Document3 pagesExp 7Ashwini KothavaleNo ratings yet
- Topics Included: Introduction To Stepper Motors & Rotation Sequences Interfacing and Isolating Circuitry Industrial ApplicationsDocument20 pagesTopics Included: Introduction To Stepper Motors & Rotation Sequences Interfacing and Isolating Circuitry Industrial ApplicationsGA16DETNo ratings yet
- Stepper MotorDocument4 pagesStepper Motor1020-Santhosh kumar. JNo ratings yet
- CountersDocument14 pagesCountersMs.DEVI P100% (17)
- Asynchronous and Synchronous Counters: Week 10 and Week 11 (Lecture 1 of 2)Document46 pagesAsynchronous and Synchronous Counters: Week 10 and Week 11 (Lecture 1 of 2)sweethari20009No ratings yet
- Stepper MotorDocument6 pagesStepper MotorSiddharth MishraNo ratings yet
- Stepper Motor Controller Using 8051Document37 pagesStepper Motor Controller Using 8051gutzz0079197100% (2)
- CountersDocument47 pagesCountersAnonymous iQVjcOhNo ratings yet
- The Ring CounterDocument4 pagesThe Ring CounterPraveen KumarNo ratings yet
- Experiment 8: Counting Circuits: (Assignment)Document3 pagesExperiment 8: Counting Circuits: (Assignment)AL Asmr YamakNo ratings yet
- Stepper MotorDocument6 pagesStepper MotorSuganthi EvangelineNo ratings yet
- Digital Design Lab: Snehangshu Bhattacharya 33 A 10900316057 4thDocument7 pagesDigital Design Lab: Snehangshu Bhattacharya 33 A 10900316057 4thJohn DoeNo ratings yet
- Mendoza - Experiment No.14Document3 pagesMendoza - Experiment No.14Aldrin MndzNo ratings yet
- Ovi 5Document6 pagesOvi 5Naimur Asif BornoNo ratings yet
- Name: Izaan Ahmed Khan STD ID: FA19-BSCS-0049 COURSE: DLD Theory Assignment # 03Document10 pagesName: Izaan Ahmed Khan STD ID: FA19-BSCS-0049 COURSE: DLD Theory Assignment # 03Izaan Ahmed KhanNo ratings yet
- 3 Bit Synchronous Up CounterDocument15 pages3 Bit Synchronous Up CounterMaruf MorshedNo ratings yet
- Digital Circuits - Application of Shift RegistersDocument4 pagesDigital Circuits - Application of Shift RegistersB.Prashant JhaNo ratings yet
- Massachusetts Institute of TechnologyDocument3 pagesMassachusetts Institute of TechnologyJack SoNo ratings yet
- EE3101 Communication Engineering: Chapter 3-2, SynchronizationDocument15 pagesEE3101 Communication Engineering: Chapter 3-2, SynchronizationfishkantNo ratings yet
- Counter Circuits: ObjectivesDocument9 pagesCounter Circuits: ObjectivesRuhul Amin Khalil100% (1)
- 08 Shift RegisterDocument12 pages08 Shift RegisterChen ShyanNo ratings yet
- Experiment 2 SALAZARDocument9 pagesExperiment 2 SALAZARgerand salazarNo ratings yet
- Ch. 3: Forward and Inverse Kinematics: KON 318E: Introduction To Robotics 1Document79 pagesCh. 3: Forward and Inverse Kinematics: KON 318E: Introduction To Robotics 1Dursun DurmasınNo ratings yet
- P211 OrderForm - v5 - 112019Document6 pagesP211 OrderForm - v5 - 112019keglobalNo ratings yet
- 5.1 Speed Control DC Motor Using PWMDocument3 pages5.1 Speed Control DC Motor Using PWMkrishnaNo ratings yet
- Design of Fuzzy PID Controller For Brushless DC Motor: Research ArticleDocument10 pagesDesign of Fuzzy PID Controller For Brushless DC Motor: Research ArticleadilNo ratings yet
- MODULE 4 - Flip Flop & RegistersDocument27 pagesMODULE 4 - Flip Flop & RegistersChaitanya J S ReddyNo ratings yet
- ENS2456 Solutions 4Document9 pagesENS2456 Solutions 4omairakhtar12345No ratings yet
- 37 DLD Lec 37 Design of Sequential Circuits Example Dated 09 Dec 2022 Lecture SlidesDocument18 pages37 DLD Lec 37 Design of Sequential Circuits Example Dated 09 Dec 2022 Lecture SlidesZuha FatimaNo ratings yet
- Shift Registers: Socketed 74LS164 8-Bit Shift Register ChipDocument46 pagesShift Registers: Socketed 74LS164 8-Bit Shift Register Chipangelgalaxylife87No ratings yet
- CELEBROWDocument16 pagesCELEBROWEpaja Jeremiah JesseNo ratings yet
- 5 - Flip-Flops and Synchronous Sequential CircuitsDocument10 pages5 - Flip-Flops and Synchronous Sequential CircuitsHadeer GamalNo ratings yet
- Lab 10Document7 pagesLab 10Syed Muhammad AhmadNo ratings yet
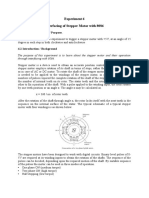
- Experiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / PurposeDocument4 pagesExperiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / Purposepraveenembd1No ratings yet
- Digital Electronics - Tutorial #1Document3 pagesDigital Electronics - Tutorial #1Dishawn NationNo ratings yet
- Something I Dont Wanna See AgainDocument70 pagesSomething I Dont Wanna See AgainLisaNo ratings yet
- Digital Circuits - CountersDocument6 pagesDigital Circuits - CountersB.Prashant JhaNo ratings yet
- Screenshot 2566-09-08 at 20.27.55Document8 pagesScreenshot 2566-09-08 at 20.27.55dhanabadee.kNo ratings yet
- Lect Register EE208Document16 pagesLect Register EE208Anonymous 001No ratings yet
- Stepper MotorDocument15 pagesStepper MotorsharadaNo ratings yet
- AN-1215 Maze Runner RobotDocument11 pagesAN-1215 Maze Runner RobotMukeshGuptaNo ratings yet
- Theory and Application of Pulse Interpolation To Prover SystemsDocument7 pagesTheory and Application of Pulse Interpolation To Prover SystemsAghil ThayyilNo ratings yet
- Chapter 6Document7 pagesChapter 6DAWA PENJORNo ratings yet
- Arkan Kovan ABudllahDocument13 pagesArkan Kovan ABudllahYasir Yasir KovanNo ratings yet
- GCBs Endurance ABBDocument11 pagesGCBs Endurance ABBFayaz ShaikNo ratings yet
- CounterDocument30 pagesCounterVedantNo ratings yet
- Quiz AnswarDocument10 pagesQuiz AnswarHarshu VagadiyaNo ratings yet
- Lect Register-EE208 2023Document23 pagesLect Register-EE208 2023catdogsunmoon12No ratings yet
- FDDGDocument3 pagesFDDGaliffpadziNo ratings yet
- Trajectory Tracking Control of A Differential Wheeled Mobile Robot: A Polar Coordinates Control and LQR ComparisonDocument4 pagesTrajectory Tracking Control of A Differential Wheeled Mobile Robot: A Polar Coordinates Control and LQR ComparisonAntonio MoisesNo ratings yet
- PC200-8 SM - 009 Electrical System PDFDocument64 pagesPC200-8 SM - 009 Electrical System PDFPocilNo ratings yet
- CSE 205: Digital Logic DesignDocument53 pagesCSE 205: Digital Logic DesignAfifa murshida NazinNo ratings yet
- AIAG FMEA TemplateDocument70 pagesAIAG FMEA TemplateBrayan Ruiz Esparza CamposNo ratings yet
- AIAG FMEA TemplateDocument70 pagesAIAG FMEA TemplatepaulNo ratings yet
- Frequency Divider D-Flip-flopsDocument12 pagesFrequency Divider D-Flip-flopsSylvester Delali Dordzi0% (1)
- Fig 1: Half Adder Circuit.: Carry SumDocument3 pagesFig 1: Half Adder Circuit.: Carry SumSiva ArunNo ratings yet
- Digital Logic CounterDocument12 pagesDigital Logic CounterRaziya SultanaNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Simple Machine: Mechanical AdvantageDocument4 pagesSimple Machine: Mechanical AdvantageTrisson HarteNo ratings yet
- MDV R32 RemoteControllerUsersManual ENGDocument10 pagesMDV R32 RemoteControllerUsersManual ENGtibikomaNo ratings yet
- Differences Between OM1 OM2 OM3 OM4Document3 pagesDifferences Between OM1 OM2 OM3 OM4Alejandro Andres Muñoz EscobarNo ratings yet
- LINEARlight Flex Uniformity Specification Sheet (EN)Document20 pagesLINEARlight Flex Uniformity Specification Sheet (EN)team37No ratings yet
- Fiber Optics Splicing Procedures: Your Source To Fiber Optics, Industrial Datacomm & Fieldbus Products-Solutions-ServicesDocument7 pagesFiber Optics Splicing Procedures: Your Source To Fiber Optics, Industrial Datacomm & Fieldbus Products-Solutions-ServicesHafis Aikal AmranNo ratings yet
- Olympus CX - 21 Manual de Usuario PDFDocument28 pagesOlympus CX - 21 Manual de Usuario PDFApocalipsis2072No ratings yet
- Mac25 Maintenance Section 2Document27 pagesMac25 Maintenance Section 2Wahyu SriharjaNo ratings yet
- G5 IDM Unit Troubleshooting ClassDocument98 pagesG5 IDM Unit Troubleshooting Classsorangel_123No ratings yet
- Valves and LeakagesDocument15 pagesValves and LeakagesCesare Daldossi100% (2)
- Bifacial Module Installation Manual - ENDocument11 pagesBifacial Module Installation Manual - ENGabrielDarienTeporaVillarNo ratings yet
- Installation Procedure T5MaxDocument2 pagesInstallation Procedure T5MaxCarlos Alberto RuedaNo ratings yet
- Yuri - Manual Microtome VCM-202TDocument12 pagesYuri - Manual Microtome VCM-202Tyalva alvarinoNo ratings yet
- Ex. No.: 08: Go-Down WiringDocument5 pagesEx. No.: 08: Go-Down WiringamanNo ratings yet
- Ammeter, Voltmeter Testing Not Applicable For This PanelDocument3 pagesAmmeter, Voltmeter Testing Not Applicable For This Paneleswaran005No ratings yet
- M C 3-35 Philips SON-T 400WDocument3 pagesM C 3-35 Philips SON-T 400WVũ TúNo ratings yet
- Level Control Loop-1Document8 pagesLevel Control Loop-1Amna liaquatNo ratings yet
- Civil Engineering in Indoor SubstationDocument12 pagesCivil Engineering in Indoor SubstationfarhanNo ratings yet
- Beamex IPRT Probe Brochure ENGDocument1 pageBeamex IPRT Probe Brochure ENGmohamedNo ratings yet
- Standard Spare Parts List JM 1108HD - CJ411Document1 pageStandard Spare Parts List JM 1108HD - CJ411Mf LuiNo ratings yet
- Bravo Radar (BSMT31-B1)Document20 pagesBravo Radar (BSMT31-B1)Christian Felix GuevarraNo ratings yet
- Karabin 98KDocument1 pageKarabin 98KdragoljubNo ratings yet
- TG1YDocument12 pagesTG1Ynicer gutierrez galvezNo ratings yet
- SBJV - Rnav Akseb 2e Rwy 15 - Sid - 20230323Document1 pageSBJV - Rnav Akseb 2e Rwy 15 - Sid - 20230323Alexandre MedeirosNo ratings yet
- MELDAS AC SERVO MDS-B-SVJ2 Series SPECIFICATIONS AND INSTRUCTION MANUAL OSA17Document1 pageMELDAS AC SERVO MDS-B-SVJ2 Series SPECIFICATIONS AND INSTRUCTION MANUAL OSA17jroyal692974No ratings yet
- Drum and Lining Brake 2Document4 pagesDrum and Lining Brake 2albert svensenNo ratings yet
- +metkon Metacut 302 Operation and Instruction Manual Mt18-02Document28 pages+metkon Metacut 302 Operation and Instruction Manual Mt18-02Minh TBB GlobalNo ratings yet
- Komatsu PC200 PC228U - Pins Bushes Seals ShimsDocument12 pagesKomatsu PC200 PC228U - Pins Bushes Seals Shimsmostafa aliNo ratings yet

























































































Download as pdf or txt
You might also like
- 312C - Esquema EletricoDocument2 pages312C - Esquema EletricoMarco OlivettoNo ratings yet
- 2W Switch Catalog 2022 LRDocument124 pages2W Switch Catalog 2022 LRRamkinkar Guru100% (1)
- Digital Lab Report 3Document8 pagesDigital Lab Report 3علي عليNo ratings yet
- HOLGAGONDocument8 pagesHOLGAGONRisky HidayatNo ratings yet
- 8051 Lab Stepper Motor InterfacingDocument5 pages8051 Lab Stepper Motor InterfacingGirish ChapleNo ratings yet
- Exp 7Document3 pagesExp 7Ashwini KothavaleNo ratings yet
- Topics Included: Introduction To Stepper Motors & Rotation Sequences Interfacing and Isolating Circuitry Industrial ApplicationsDocument20 pagesTopics Included: Introduction To Stepper Motors & Rotation Sequences Interfacing and Isolating Circuitry Industrial ApplicationsGA16DETNo ratings yet
- Stepper MotorDocument4 pagesStepper Motor1020-Santhosh kumar. JNo ratings yet
- CountersDocument14 pagesCountersMs.DEVI P100% (17)
- Asynchronous and Synchronous Counters: Week 10 and Week 11 (Lecture 1 of 2)Document46 pagesAsynchronous and Synchronous Counters: Week 10 and Week 11 (Lecture 1 of 2)sweethari20009No ratings yet
- Stepper MotorDocument6 pagesStepper MotorSiddharth MishraNo ratings yet
- Stepper Motor Controller Using 8051Document37 pagesStepper Motor Controller Using 8051gutzz0079197100% (2)
- CountersDocument47 pagesCountersAnonymous iQVjcOhNo ratings yet
- The Ring CounterDocument4 pagesThe Ring CounterPraveen KumarNo ratings yet
- Experiment 8: Counting Circuits: (Assignment)Document3 pagesExperiment 8: Counting Circuits: (Assignment)AL Asmr YamakNo ratings yet
- Stepper MotorDocument6 pagesStepper MotorSuganthi EvangelineNo ratings yet
- Digital Design Lab: Snehangshu Bhattacharya 33 A 10900316057 4thDocument7 pagesDigital Design Lab: Snehangshu Bhattacharya 33 A 10900316057 4thJohn DoeNo ratings yet
- Mendoza - Experiment No.14Document3 pagesMendoza - Experiment No.14Aldrin MndzNo ratings yet
- Ovi 5Document6 pagesOvi 5Naimur Asif BornoNo ratings yet
- Name: Izaan Ahmed Khan STD ID: FA19-BSCS-0049 COURSE: DLD Theory Assignment # 03Document10 pagesName: Izaan Ahmed Khan STD ID: FA19-BSCS-0049 COURSE: DLD Theory Assignment # 03Izaan Ahmed KhanNo ratings yet
- 3 Bit Synchronous Up CounterDocument15 pages3 Bit Synchronous Up CounterMaruf MorshedNo ratings yet
- Digital Circuits - Application of Shift RegistersDocument4 pagesDigital Circuits - Application of Shift RegistersB.Prashant JhaNo ratings yet
- Massachusetts Institute of TechnologyDocument3 pagesMassachusetts Institute of TechnologyJack SoNo ratings yet
- EE3101 Communication Engineering: Chapter 3-2, SynchronizationDocument15 pagesEE3101 Communication Engineering: Chapter 3-2, SynchronizationfishkantNo ratings yet
- Counter Circuits: ObjectivesDocument9 pagesCounter Circuits: ObjectivesRuhul Amin Khalil100% (1)
- 08 Shift RegisterDocument12 pages08 Shift RegisterChen ShyanNo ratings yet
- Experiment 2 SALAZARDocument9 pagesExperiment 2 SALAZARgerand salazarNo ratings yet
- Ch. 3: Forward and Inverse Kinematics: KON 318E: Introduction To Robotics 1Document79 pagesCh. 3: Forward and Inverse Kinematics: KON 318E: Introduction To Robotics 1Dursun DurmasınNo ratings yet
- P211 OrderForm - v5 - 112019Document6 pagesP211 OrderForm - v5 - 112019keglobalNo ratings yet
- 5.1 Speed Control DC Motor Using PWMDocument3 pages5.1 Speed Control DC Motor Using PWMkrishnaNo ratings yet
- Design of Fuzzy PID Controller For Brushless DC Motor: Research ArticleDocument10 pagesDesign of Fuzzy PID Controller For Brushless DC Motor: Research ArticleadilNo ratings yet
- MODULE 4 - Flip Flop & RegistersDocument27 pagesMODULE 4 - Flip Flop & RegistersChaitanya J S ReddyNo ratings yet
- ENS2456 Solutions 4Document9 pagesENS2456 Solutions 4omairakhtar12345No ratings yet
- 37 DLD Lec 37 Design of Sequential Circuits Example Dated 09 Dec 2022 Lecture SlidesDocument18 pages37 DLD Lec 37 Design of Sequential Circuits Example Dated 09 Dec 2022 Lecture SlidesZuha FatimaNo ratings yet
- Shift Registers: Socketed 74LS164 8-Bit Shift Register ChipDocument46 pagesShift Registers: Socketed 74LS164 8-Bit Shift Register Chipangelgalaxylife87No ratings yet
- CELEBROWDocument16 pagesCELEBROWEpaja Jeremiah JesseNo ratings yet
- 5 - Flip-Flops and Synchronous Sequential CircuitsDocument10 pages5 - Flip-Flops and Synchronous Sequential CircuitsHadeer GamalNo ratings yet
- Lab 10Document7 pagesLab 10Syed Muhammad AhmadNo ratings yet
- Experiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / PurposeDocument4 pagesExperiment 6 Interfacing of Stepper Motor With 8086: 6.1 Aim(s) / Objective(s) / Purposepraveenembd1No ratings yet
- Digital Electronics - Tutorial #1Document3 pagesDigital Electronics - Tutorial #1Dishawn NationNo ratings yet
- Something I Dont Wanna See AgainDocument70 pagesSomething I Dont Wanna See AgainLisaNo ratings yet
- Digital Circuits - CountersDocument6 pagesDigital Circuits - CountersB.Prashant JhaNo ratings yet
- Screenshot 2566-09-08 at 20.27.55Document8 pagesScreenshot 2566-09-08 at 20.27.55dhanabadee.kNo ratings yet
- Lect Register EE208Document16 pagesLect Register EE208Anonymous 001No ratings yet
- Stepper MotorDocument15 pagesStepper MotorsharadaNo ratings yet
- AN-1215 Maze Runner RobotDocument11 pagesAN-1215 Maze Runner RobotMukeshGuptaNo ratings yet
- Theory and Application of Pulse Interpolation To Prover SystemsDocument7 pagesTheory and Application of Pulse Interpolation To Prover SystemsAghil ThayyilNo ratings yet
- Chapter 6Document7 pagesChapter 6DAWA PENJORNo ratings yet
- Arkan Kovan ABudllahDocument13 pagesArkan Kovan ABudllahYasir Yasir KovanNo ratings yet
- GCBs Endurance ABBDocument11 pagesGCBs Endurance ABBFayaz ShaikNo ratings yet
- CounterDocument30 pagesCounterVedantNo ratings yet
- Quiz AnswarDocument10 pagesQuiz AnswarHarshu VagadiyaNo ratings yet
- Lect Register-EE208 2023Document23 pagesLect Register-EE208 2023catdogsunmoon12No ratings yet
- FDDGDocument3 pagesFDDGaliffpadziNo ratings yet
- Trajectory Tracking Control of A Differential Wheeled Mobile Robot: A Polar Coordinates Control and LQR ComparisonDocument4 pagesTrajectory Tracking Control of A Differential Wheeled Mobile Robot: A Polar Coordinates Control and LQR ComparisonAntonio MoisesNo ratings yet
- PC200-8 SM - 009 Electrical System PDFDocument64 pagesPC200-8 SM - 009 Electrical System PDFPocilNo ratings yet
- CSE 205: Digital Logic DesignDocument53 pagesCSE 205: Digital Logic DesignAfifa murshida NazinNo ratings yet
- AIAG FMEA TemplateDocument70 pagesAIAG FMEA TemplateBrayan Ruiz Esparza CamposNo ratings yet
- AIAG FMEA TemplateDocument70 pagesAIAG FMEA TemplatepaulNo ratings yet
- Frequency Divider D-Flip-flopsDocument12 pagesFrequency Divider D-Flip-flopsSylvester Delali Dordzi0% (1)
- Fig 1: Half Adder Circuit.: Carry SumDocument3 pagesFig 1: Half Adder Circuit.: Carry SumSiva ArunNo ratings yet
- Digital Logic CounterDocument12 pagesDigital Logic CounterRaziya SultanaNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Simple Machine: Mechanical AdvantageDocument4 pagesSimple Machine: Mechanical AdvantageTrisson HarteNo ratings yet
- MDV R32 RemoteControllerUsersManual ENGDocument10 pagesMDV R32 RemoteControllerUsersManual ENGtibikomaNo ratings yet
- Differences Between OM1 OM2 OM3 OM4Document3 pagesDifferences Between OM1 OM2 OM3 OM4Alejandro Andres Muñoz EscobarNo ratings yet
- LINEARlight Flex Uniformity Specification Sheet (EN)Document20 pagesLINEARlight Flex Uniformity Specification Sheet (EN)team37No ratings yet
- Fiber Optics Splicing Procedures: Your Source To Fiber Optics, Industrial Datacomm & Fieldbus Products-Solutions-ServicesDocument7 pagesFiber Optics Splicing Procedures: Your Source To Fiber Optics, Industrial Datacomm & Fieldbus Products-Solutions-ServicesHafis Aikal AmranNo ratings yet
- Olympus CX - 21 Manual de Usuario PDFDocument28 pagesOlympus CX - 21 Manual de Usuario PDFApocalipsis2072No ratings yet
- Mac25 Maintenance Section 2Document27 pagesMac25 Maintenance Section 2Wahyu SriharjaNo ratings yet
- G5 IDM Unit Troubleshooting ClassDocument98 pagesG5 IDM Unit Troubleshooting Classsorangel_123No ratings yet
- Valves and LeakagesDocument15 pagesValves and LeakagesCesare Daldossi100% (2)
- Bifacial Module Installation Manual - ENDocument11 pagesBifacial Module Installation Manual - ENGabrielDarienTeporaVillarNo ratings yet
- Installation Procedure T5MaxDocument2 pagesInstallation Procedure T5MaxCarlos Alberto RuedaNo ratings yet
- Yuri - Manual Microtome VCM-202TDocument12 pagesYuri - Manual Microtome VCM-202Tyalva alvarinoNo ratings yet
- Ex. No.: 08: Go-Down WiringDocument5 pagesEx. No.: 08: Go-Down WiringamanNo ratings yet
- Ammeter, Voltmeter Testing Not Applicable For This PanelDocument3 pagesAmmeter, Voltmeter Testing Not Applicable For This Paneleswaran005No ratings yet
- M C 3-35 Philips SON-T 400WDocument3 pagesM C 3-35 Philips SON-T 400WVũ TúNo ratings yet
- Level Control Loop-1Document8 pagesLevel Control Loop-1Amna liaquatNo ratings yet
- Civil Engineering in Indoor SubstationDocument12 pagesCivil Engineering in Indoor SubstationfarhanNo ratings yet
- Beamex IPRT Probe Brochure ENGDocument1 pageBeamex IPRT Probe Brochure ENGmohamedNo ratings yet
- Standard Spare Parts List JM 1108HD - CJ411Document1 pageStandard Spare Parts List JM 1108HD - CJ411Mf LuiNo ratings yet
- Bravo Radar (BSMT31-B1)Document20 pagesBravo Radar (BSMT31-B1)Christian Felix GuevarraNo ratings yet
- Karabin 98KDocument1 pageKarabin 98KdragoljubNo ratings yet
- TG1YDocument12 pagesTG1Ynicer gutierrez galvezNo ratings yet
- SBJV - Rnav Akseb 2e Rwy 15 - Sid - 20230323Document1 pageSBJV - Rnav Akseb 2e Rwy 15 - Sid - 20230323Alexandre MedeirosNo ratings yet
- MELDAS AC SERVO MDS-B-SVJ2 Series SPECIFICATIONS AND INSTRUCTION MANUAL OSA17Document1 pageMELDAS AC SERVO MDS-B-SVJ2 Series SPECIFICATIONS AND INSTRUCTION MANUAL OSA17jroyal692974No ratings yet
- Drum and Lining Brake 2Document4 pagesDrum and Lining Brake 2albert svensenNo ratings yet
- +metkon Metacut 302 Operation and Instruction Manual Mt18-02Document28 pages+metkon Metacut 302 Operation and Instruction Manual Mt18-02Minh TBB GlobalNo ratings yet
- Komatsu PC200 PC228U - Pins Bushes Seals ShimsDocument12 pagesKomatsu PC200 PC228U - Pins Bushes Seals Shimsmostafa aliNo ratings yet