Download as pdf or txt
You might also like
- Line Drop CompensationDocument4 pagesLine Drop Compensationchaman_pundirNo ratings yet
- Understanding Voltage Regulators - Smart Grid Solutions - SiemensDocument5 pagesUnderstanding Voltage Regulators - Smart Grid Solutions - SiemenstusarNo ratings yet
- Docs Books M-2001B-IB PDFDocument130 pagesDocs Books M-2001B-IB PDFDomingo CordovaNo ratings yet
- chp2 2Document7 pageschp2 2karen dejoNo ratings yet
- LS-TSZD - QJ005 Turbine Bypass System Commissioning ProcedureDocument24 pagesLS-TSZD - QJ005 Turbine Bypass System Commissioning ProcedureBharath Nadimpalli100% (1)
- Electrical Rooms DimensionDocument124 pagesElectrical Rooms DimensionabebaNo ratings yet
- A Review of Voltage Control Techniques of Networks With Distributed Generations Using On-Load Tap Changer TransformersDocument6 pagesA Review of Voltage Control Techniques of Networks With Distributed Generations Using On-Load Tap Changer Transformersstrange_kid82No ratings yet
- Spau341 TobenbDocument8 pagesSpau341 TobenbBata ZivanovicNo ratings yet
- Voltage Regulating Control RelayDocument8 pagesVoltage Regulating Control Relaytyping tNo ratings yet
- How Voltage Regulators OperateDocument6 pagesHow Voltage Regulators Operateenriqueuno100% (1)
- Rac or DementDocument12 pagesRac or DementsoltaniNo ratings yet
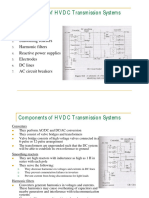
- Thyristor Based HVDC SystemDocument5 pagesThyristor Based HVDC SystemAnonymous hzXy93FAE0% (1)
- RTCCDocument9 pagesRTCCer_ashutosh87No ratings yet
- Control of HVDCDocument38 pagesControl of HVDCPrasanna Kumar100% (2)
- Voltage Control Techniques Session 1Document23 pagesVoltage Control Techniques Session 1Sumit SinghNo ratings yet
- ATS PANELS 2018 FOR Nov 29th 2018Document14 pagesATS PANELS 2018 FOR Nov 29th 2018zainahmedscribdNo ratings yet
- Implementation of LCC HVDC Converter TransformerDocument6 pagesImplementation of LCC HVDC Converter Transformerdhuamani01No ratings yet
- Voltage Regulation at Sites With Distributed GenerationDocument10 pagesVoltage Regulation at Sites With Distributed GenerationpetarlNo ratings yet
- 1106740701122-KVGC202 en TDDocument12 pages1106740701122-KVGC202 en TDAnonymous 9VcxlFErfNo ratings yet
- Catalog rt2db - (English) - Ind 4 PDFDocument8 pagesCatalog rt2db - (English) - Ind 4 PDFroyclhorNo ratings yet
- RTCC AvrDocument19 pagesRTCC AvrKarthikNo ratings yet
- Slup 075Document12 pagesSlup 075Gowtham SanampalliNo ratings yet
- Catalogo Thyripol Ingles - ExcitacaoDocument14 pagesCatalogo Thyripol Ingles - ExcitacaoErbil KeskinNo ratings yet
- Transformer OLTC Control in Power SystemsDocument12 pagesTransformer OLTC Control in Power SystemsIndiranInNo ratings yet
- Exp 7 Familiarization With The ChopperInverter Control Unit PDFDocument10 pagesExp 7 Familiarization With The ChopperInverter Control Unit PDFusmpowerlabNo ratings yet
- Synchronizing and Synchronizing EquipmentDocument10 pagesSynchronizing and Synchronizing EquipmentLog in 2007No ratings yet
- Unit-2-Converter and HVDC System ControlDocument14 pagesUnit-2-Converter and HVDC System ControlT shivaprasad100% (1)
- Voltage Regulation PDFDocument10 pagesVoltage Regulation PDFveljal6317No ratings yet
- High-Speed Busbar TransferDocument8 pagesHigh-Speed Busbar TransferFlo MircaNo ratings yet
- Advanced Paralleling of LTC: Transformers by Var MethodDocument5 pagesAdvanced Paralleling of LTC: Transformers by Var MethodsvismaelNo ratings yet
- 06 Chapter1Document21 pages06 Chapter1ShenbagalakshmiNo ratings yet
- Voltage and Reactive Power Control: Code: EEE 574Document34 pagesVoltage and Reactive Power Control: Code: EEE 574kaaisNo ratings yet
- Unit-2-Converter and HVDC System ControlDocument13 pagesUnit-2-Converter and HVDC System Controlravikumar_ranganNo ratings yet
- FOR Paralleling Module APM 2000Document4 pagesFOR Paralleling Module APM 2000Jaffer HussainNo ratings yet
- AvrDocument44 pagesAvrVenkata ChennaiahNo ratings yet
- WINSEM2023-24 BEEE406L TH VL2023240502855 2024-03-12 Reference-Material-IDocument14 pagesWINSEM2023-24 BEEE406L TH VL2023240502855 2024-03-12 Reference-Material-IRahul ganthNo ratings yet
- GE2011 IbDocument152 pagesGE2011 IbEsteban SosaNo ratings yet
- Analysis and Modeling of Digital Peak Current Mode ControlDocument6 pagesAnalysis and Modeling of Digital Peak Current Mode Controltinhmaixatoi2006No ratings yet
- Single Phase Automatic Voltage Regulator DesignDocument9 pagesSingle Phase Automatic Voltage Regulator DesignPeter JordanNo ratings yet
- Voltage and Reactive Power ControlDocument34 pagesVoltage and Reactive Power Controlpsmeee100% (2)
- A Guide On Load Flow Analysis Using ETAPDocument20 pagesA Guide On Load Flow Analysis Using ETAPMalik EltayiebNo ratings yet
- MVCG61 Voltage Dependent Overcurrent PDFDocument10 pagesMVCG61 Voltage Dependent Overcurrent PDFOoi Ban JuanNo ratings yet
- EE21 Design of Closed Loop Controlled Ac Voltage Regulator Using TRIACDocument3 pagesEE21 Design of Closed Loop Controlled Ac Voltage Regulator Using TRIACSatishkumar KundrapuNo ratings yet
- Static Voltage Regulator SynopsisDocument4 pagesStatic Voltage Regulator SynopsisShravan JadhavNo ratings yet
- Intersil - Selecting-A-Pwm-Controller For Narrow On Time Buck ConversionDocument7 pagesIntersil - Selecting-A-Pwm-Controller For Narrow On Time Buck ConversionIvana PrezimeNo ratings yet
- Simulation of Integrated Volt-VAR Control For PV Penetration Studies - Li2017Document5 pagesSimulation of Integrated Volt-VAR Control For PV Penetration Studies - Li2017Noé Rafael Colorado SósolNo ratings yet
- Unit 1Document14 pagesUnit 1Yogesh KarlekarNo ratings yet
- Excitation System - 11.05.2011Document52 pagesExcitation System - 11.05.2011vijayrajuNo ratings yet
- Economic Operation of Power SystemDocument45 pagesEconomic Operation of Power SystemDogbey BrightNo ratings yet
- How To Determine Power Transformer Impedance For Calculation of Short-Circuit CurrentsDocument9 pagesHow To Determine Power Transformer Impedance For Calculation of Short-Circuit CurrentsYoussef BoulaghlaNo ratings yet
- Voltage and Reactive Power Control: Code: EEE 574Document34 pagesVoltage and Reactive Power Control: Code: EEE 574Fuh Vallery100% (1)
- The Modeling and Application of Step Voltage RegulatorDocument7 pagesThe Modeling and Application of Step Voltage RegulatorAmritanshu PandeyNo ratings yet
- Lab Manual Switchgear and Protection SapDocument46 pagesLab Manual Switchgear and Protection SapYash MaheshwariNo ratings yet
- A Modified Method of Voltage Controller For Three Phase Induction Motor Using Three Phase Voltage Source InverterDocument7 pagesA Modified Method of Voltage Controller For Three Phase Induction Motor Using Three Phase Voltage Source InverterEditor IJRITCCNo ratings yet
- Fuzzy Multi-Agent Based Voltage and Reactive Power Control: Bessie Monchusi, Adedayo Yusuff, Josiah Munda, Adisa JimohDocument5 pagesFuzzy Multi-Agent Based Voltage and Reactive Power Control: Bessie Monchusi, Adedayo Yusuff, Josiah Munda, Adisa JimohsivagamipalaniNo ratings yet
- Unit Iii: Long-Duration Voltage VariationsDocument10 pagesUnit Iii: Long-Duration Voltage Variationslvb123No ratings yet
- ELEC4612-12 Exp 2 Power FlowDocument5 pagesELEC4612-12 Exp 2 Power FlowDavid VangNo ratings yet
- How Avr Operate. How To Size Up Avr.77006Document6 pagesHow Avr Operate. How To Size Up Avr.77006Rafat ThongNo ratings yet
- A.C Voltage Regulator Using TriacDocument3 pagesA.C Voltage Regulator Using TriacSrinivas VarmaNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Corporat Online Banking Form - ENDocument9 pagesCorporat Online Banking Form - ENFeroz HakkimNo ratings yet
- 413 VLF 10-10-2023Document8 pages413 VLF 10-10-2023Feroz HakkimNo ratings yet
- 46 La PMT 23 10 23 MowredDocument4 pages46 La PMT 23 10 23 MowredFeroz HakkimNo ratings yet
- M.R N.O. LG-ELE-20-048 Testing TransformerDocument2 pagesM.R N.O. LG-ELE-20-048 Testing TransformerFeroz HakkimNo ratings yet
- 33Kv Feeder - H - Ln10 From Shinas Grid StationDocument7 pages33Kv Feeder - H - Ln10 From Shinas Grid StationFeroz HakkimNo ratings yet
- Experiences Transformers: John R. John James ADocument5 pagesExperiences Transformers: John R. John James AAlberto OrtizNo ratings yet
- ABB Price Book 689Document1 pageABB Price Book 689EliasNo ratings yet
- Power Transmission: Lab ReportDocument13 pagesPower Transmission: Lab ReportMohibur RehmanNo ratings yet
- La-101914 31136 105 PDFDocument4 pagesLa-101914 31136 105 PDFAnonymous TrDuMhMvNo ratings yet
- Product Data Sheet: Circuit Breaker Compact Nsx100H, 70 Ka at 415 Vac, TMD Trip Unit 100 A, 3 Poles 3DDocument3 pagesProduct Data Sheet: Circuit Breaker Compact Nsx100H, 70 Ka at 415 Vac, TMD Trip Unit 100 A, 3 Poles 3DJorge FranciscoNo ratings yet
- Coal Fired Power PlantDocument56 pagesCoal Fired Power PlantAugustine Owo Ukpong100% (2)
- Tata Power-Delhi Distribution Limited: A Summer Internship Report OnDocument42 pagesTata Power-Delhi Distribution Limited: A Summer Internship Report OnMohit KumarNo ratings yet
- Experiment No.1 AciertoDocument11 pagesExperiment No.1 AciertoRon Angelo AciertoNo ratings yet
- CII New Age Power SystemsDocument56 pagesCII New Age Power Systemssanjeevpnd439No ratings yet
- SS 316 04Document12 pagesSS 316 04Muhammad Asif IqbalNo ratings yet
- Generator Sizing The Ultimate GuideDocument3 pagesGenerator Sizing The Ultimate GuideRashedul IslamNo ratings yet
- Best Relay Protection Practices Applied To Shunt ReactorsDocument15 pagesBest Relay Protection Practices Applied To Shunt ReactorsMohammadImranRazaNo ratings yet
- Ti SPC Psi 40 150 CHGR 1210Document14 pagesTi SPC Psi 40 150 CHGR 1210Anubhav Hem Kumar JainNo ratings yet
- 10-Tutorial of Induction MotorDocument48 pages10-Tutorial of Induction Motorrida.hamza.muhammadNo ratings yet
- Compact Substation PDFDocument2 pagesCompact Substation PDFMalitha PeirisNo ratings yet
- Power&Energy MetersDocument18 pagesPower&Energy Metersbeen800No ratings yet
- Privatization and Regulation in MalaysiaDocument9 pagesPrivatization and Regulation in Malaysiamiramoo100% (2)
- SP 1103 Electrical Engineering GuidelinesDocument22 pagesSP 1103 Electrical Engineering Guidelinesabdou0% (2)
- Gbu Ip Pltu SuralayaDocument5 pagesGbu Ip Pltu SuralayaGanti AsegarNo ratings yet
- Univibe ENGDocument5 pagesUnivibe ENGba3jarNo ratings yet
- Datasheet Solis - (100-110) K-5G GBR V2.1 2022 10Document2 pagesDatasheet Solis - (100-110) K-5G GBR V2.1 2022 10Pawrij SuriyaaroonrojNo ratings yet
- Roca Bert 2012Document16 pagesRoca Bert 2012kalokosNo ratings yet
- Chem Energy WebquestDocument5 pagesChem Energy Webquestapi-297581533No ratings yet
- Technical Data 11kV AIS VHIHDocument6 pagesTechnical Data 11kV AIS VHIHSelvin Francis100% (2)
- Removal EE 102 Electrical Circuit Theory II - 2Document2 pagesRemoval EE 102 Electrical Circuit Theory II - 2Jerry HalibasNo ratings yet
- Bangladesh Power Development BoardDocument14 pagesBangladesh Power Development BoardMd.Azam KhanNo ratings yet
- Tesvolt Tps TD en A11 180530Document6 pagesTesvolt Tps TD en A11 180530Rizky Tri UtomoNo ratings yet
- CSI Inverter - 3ph 15-30KW-T220 GL03 - V1.0 - Dec 2021Document2 pagesCSI Inverter - 3ph 15-30KW-T220 GL03 - V1.0 - Dec 2021Anton0% (1)