Download as pdf or txt
You might also like
- Uranian Master Lexicon 2.1Document409 pagesUranian Master Lexicon 2.1rmharris2018100% (4)
- 8.4 HW PropertiesRectRhomSquPracticeDocument2 pages8.4 HW PropertiesRectRhomSquPracticeERVIN DANCANo ratings yet
- Moretti - Atlas of The European NovelDocument112 pagesMoretti - Atlas of The European Novelincilosh100% (1)
- (9789004316171 - Rashda - The Birth and Growth of An Egyptian Oasis Village) Rashda - The Birth and Growth of An Egyptian Oasis VillageDocument322 pages(9789004316171 - Rashda - The Birth and Growth of An Egyptian Oasis Village) Rashda - The Birth and Growth of An Egyptian Oasis VillageMarija RadjaNo ratings yet
- SAA For JCCDocument18 pagesSAA For JCCShu-Bo YangNo ratings yet
- Non Parametric PredictionDocument16 pagesNon Parametric PredictionTraderCat SolarisNo ratings yet
- A Fuzzy TOPSIS Decision Making Model With Entropy Weight Under Intuitionistic Fuzzy EnvironmentDocument4 pagesA Fuzzy TOPSIS Decision Making Model With Entropy Weight Under Intuitionistic Fuzzy EnvironmentHivdaNo ratings yet
- On The Connection Between Neural Processes and Gaussian Processes With Deep KernelsDocument6 pagesOn The Connection Between Neural Processes and Gaussian Processes With Deep KernelsNina MouhoubNo ratings yet
- B671-672 Supplemental Notes 2 Hypergeometric, Binomial, Poisson and Multinomial Random Variables and Borel SetsDocument13 pagesB671-672 Supplemental Notes 2 Hypergeometric, Binomial, Poisson and Multinomial Random Variables and Borel SetsDesmond SeahNo ratings yet
- Multivariate Distributions: Why Random Vectors?Document14 pagesMultivariate Distributions: Why Random Vectors?Michael GarciaNo ratings yet
- Intervall de ConfidenceDocument19 pagesIntervall de ConfidenceKarimaNo ratings yet
- Mathematical StatsDocument99 pagesMathematical Statsbanjo111No ratings yet
- TMP 5 E24Document6 pagesTMP 5 E24FrontiersNo ratings yet
- The Q-Exponentials Do Not Maximize The Rényi EntropyDocument12 pagesThe Q-Exponentials Do Not Maximize The Rényi EntropyKosKal89No ratings yet
- Estimation Theory PresentationDocument66 pagesEstimation Theory PresentationBengi Mutlu Dülek100% (1)
- Statistics 3858: Statistical Models, Parameter Space and IdentifiabilityDocument6 pagesStatistics 3858: Statistical Models, Parameter Space and IdentifiabilityGustavo Guerra GeraldiniNo ratings yet
- Financial Engineering & Risk Management: Review of Basic ProbabilityDocument46 pagesFinancial Engineering & Risk Management: Review of Basic Probabilityshanky1124No ratings yet
- Nonlinear Observer Design For Smooth SystemsDocument13 pagesNonlinear Observer Design For Smooth Systemsoussama sadkiNo ratings yet
- STA 303 Lec 1Document5 pagesSTA 303 Lec 1kuriajames147No ratings yet
- Statistics DiffusionsDocument66 pagesStatistics DiffusionsGenevieve Magpayo NangitNo ratings yet
- I ConvergenceDocument18 pagesI ConvergenceshivaniNo ratings yet
- Quantitative Methods 2018-2021Document32 pagesQuantitative Methods 2018-2021Gabriel RoblesNo ratings yet
- S1 Edexcel Revision PackDocument9 pagesS1 Edexcel Revision PackJFGHANSAHNo ratings yet
- Maths Model Paper 2Document7 pagesMaths Model Paper 2ravibiriNo ratings yet
- Data Analysis For Social Scientists (14.1310x)Document12 pagesData Analysis For Social Scientists (14.1310x)SebastianNo ratings yet
- Qualifying Exam in Probability and Statistics PDFDocument11 pagesQualifying Exam in Probability and Statistics PDFYhael Jacinto Cru0% (1)
- A Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemDocument10 pagesA Numerical Algorithm Based On Rbfs For Solving An Inverse Source ProblemAnibal Coronel PerezNo ratings yet
- Assign20153 SolDocument47 pagesAssign20153 SolMarco Perez HernandezNo ratings yet
- Probabilistic Method 6Document6 pagesProbabilistic Method 6johnoftheroadNo ratings yet
- 1 Regression Analysis and Least Squares EstimatorsDocument7 pages1 Regression Analysis and Least Squares EstimatorsFreddie YuanNo ratings yet
- Polynomial InterpolationDocument10 pagesPolynomial InterpolationJuwandaNo ratings yet
- MAN006 Assignment7 PDFDocument3 pagesMAN006 Assignment7 PDFPallavi SinghNo ratings yet
- Namma Kalvi - 12th - Business - Maths - Application - Answers - Volume - 2 - 215831Document16 pagesNamma Kalvi - 12th - Business - Maths - Application - Answers - Volume - 2 - 215831satish ThamizharNo ratings yet
- Elements of Probability Theory: 2.1 Probability, Random Variables and Random MatricesDocument7 pagesElements of Probability Theory: 2.1 Probability, Random Variables and Random MatricesGerardOo Alexander SNo ratings yet
- Chap2 PDFDocument20 pagesChap2 PDFJacobNo ratings yet
- ESL: Chapter 1: 1.1 Introduction To Linear RegressionDocument4 pagesESL: Chapter 1: 1.1 Introduction To Linear RegressionPete Jacopo Belbo CayaNo ratings yet
- Stochastic ProcessesDocument46 pagesStochastic ProcessesforasepNo ratings yet
- CH 00Document4 pagesCH 00Wai Kit LeongNo ratings yet
- Correlation Coefficients of Refined-Single Valued Neutrosophic Sets and Their Applications in Multiple Attribute Decision-MakingDocument6 pagesCorrelation Coefficients of Refined-Single Valued Neutrosophic Sets and Their Applications in Multiple Attribute Decision-MakingScience DirectNo ratings yet
- Math Supplement PDFDocument17 pagesMath Supplement PDFRajat GargNo ratings yet
- Lab 7 BDocument7 pagesLab 7 Bapi-3826899No ratings yet
- Tutorial Sheet 1Document3 pagesTutorial Sheet 1Thomas MannNo ratings yet
- 6.AppliedMathProb Team 2011Document2 pages6.AppliedMathProb Team 2011Yasamin RezashateriNo ratings yet
- Bayesian regression and BitcoinDocument6 pagesBayesian regression and Bitcoinmsun27846No ratings yet
- Linear Equations in Two Variables: Quick Reference, STD: X 1Document4 pagesLinear Equations in Two Variables: Quick Reference, STD: X 1Sarbu GeorgeNo ratings yet
- Some Remarks On Fuzzy N-Normed SpacesDocument7 pagesSome Remarks On Fuzzy N-Normed SpacesRyanEliasNo ratings yet
- Archive of SID: Information Indices in The Theory of Fuzzy SetsDocument9 pagesArchive of SID: Information Indices in The Theory of Fuzzy SetsRituparna ChutiaNo ratings yet
- Non Parametric Density EstimationDocument4 pagesNon Parametric Density Estimationzeze1No ratings yet
- Tuljaram Chaturchand College of Arts, Science and Commerce, BaramatiDocument20 pagesTuljaram Chaturchand College of Arts, Science and Commerce, BaramatiLiban Ali MohamudNo ratings yet
- Content - The Mean and Variance of - ( - Bar (X) - )Document4 pagesContent - The Mean and Variance of - ( - Bar (X) - )ScarfaceXXXNo ratings yet
- Point Estimation: Institute of Technology of CambodiaDocument22 pagesPoint Estimation: Institute of Technology of CambodiaSao SavathNo ratings yet
- Assign 1Document5 pagesAssign 1darkmanhiNo ratings yet
- A Very Gentle Note On The Construction of DP ZhangDocument15 pagesA Very Gentle Note On The Construction of DP ZhangronalduckNo ratings yet
- 1 Regression Analysis and Least Squares EstimatorsDocument8 pages1 Regression Analysis and Least Squares EstimatorsJenningsJingjingXuNo ratings yet
- Metric SpacesDocument21 pagesMetric SpacesaaronbjarkeNo ratings yet
- Li2016 PDFDocument12 pagesLi2016 PDFAnonymous l2fASkJbzkNo ratings yet
- 25-08-2022-1661424708-6-Impact - Ijranss-7. Ijranss - Fixed Point Results For Parametric B-Metric SpaceDocument8 pages25-08-2022-1661424708-6-Impact - Ijranss-7. Ijranss - Fixed Point Results For Parametric B-Metric SpaceImpact JournalsNo ratings yet
- Wa0193.Document4 pagesWa0193.jagarapuyajnasriNo ratings yet
- Intuitionistic Fuzzy Differential EquationDocument4 pagesIntuitionistic Fuzzy Differential EquationSyifa IfanyaNo ratings yet
- Functional Equations For Fractal Interpolants Lj. M. Koci C and A. C. SimoncelliDocument12 pagesFunctional Equations For Fractal Interpolants Lj. M. Koci C and A. C. SimoncelliSilvia PalascaNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Ems Operations Management: Simulation, Optimization, and New Service ModelsDocument16 pagesEms Operations Management: Simulation, Optimization, and New Service ModelsvnodataNo ratings yet
- Nelsonb/ Rsmasterclass - HTML Northwestern - Edu/ Nelsonb/Wsc2022Tutorial - HTMLDocument12 pagesNelsonb/ Rsmasterclass - HTML Northwestern - Edu/ Nelsonb/Wsc2022Tutorial - HTMLvnodataNo ratings yet
- A Sequential Method For Estimating Steady-State Quantiles Using Standardized Time SeriesDocument12 pagesA Sequential Method For Estimating Steady-State Quantiles Using Standardized Time SeriesvnodataNo ratings yet
- 978-1-6654-7661-4/22/$31.00 ©2022 Ieee 1Document12 pages978-1-6654-7661-4/22/$31.00 ©2022 Ieee 1vnodataNo ratings yet
- 978-1-6654-7661-4/22/$31.00 ©2022 Ieee 61Document12 pages978-1-6654-7661-4/22/$31.00 ©2022 Ieee 61vnodataNo ratings yet
- The Polarization of Light: Experiment 3Document4 pagesThe Polarization of Light: Experiment 3Mujeeb UllahNo ratings yet
- Network Rail Lean Sigma Achieves 60m of Efficiency SavingsDocument2 pagesNetwork Rail Lean Sigma Achieves 60m of Efficiency SavingsFernanda SoaresNo ratings yet
- Patella Injuries: Pain Associated With The KneecapDocument5 pagesPatella Injuries: Pain Associated With The KneecapmarkositozNo ratings yet
- Case Study On Development of Process Failure Mode Effect Analysis (PFMEA) - Issues and RecommendationsDocument8 pagesCase Study On Development of Process Failure Mode Effect Analysis (PFMEA) - Issues and RecommendationsSang BùiNo ratings yet
- Lo2012 TPFDocument114 pagesLo2012 TPFramjoceNo ratings yet
- The Elephant and FriendsDocument2 pagesThe Elephant and FriendsENGLISHCLASS SMKN1SRKNo ratings yet
- Nabl 126Document31 pagesNabl 126Gazal GuptaNo ratings yet
- FALLSEM2022-23 BCSE202L TH VL2022230103384 Reference Material I 22-07-2022 DSA Module1 1Document15 pagesFALLSEM2022-23 BCSE202L TH VL2022230103384 Reference Material I 22-07-2022 DSA Module1 1anisha sharmaNo ratings yet
- Sistemas de Refrigeracion Industrial en AmoniacoDocument102 pagesSistemas de Refrigeracion Industrial en AmoniacoDiego Trinidad100% (8)
- I Rod Nu Bolt Product OverviewDocument6 pagesI Rod Nu Bolt Product Overviewjamehome85No ratings yet
- PPC Researched PointersDocument4 pagesPPC Researched PointershitmonNo ratings yet
- Horse Infographics by SlidesgoDocument34 pagesHorse Infographics by Slidesgomunhshur enhturNo ratings yet
- Hardy ObituaryDocument2 pagesHardy ObituaryNewzjunkyNo ratings yet
- Creative Beading Vol3 N6Document86 pagesCreative Beading Vol3 N6Rosalba Jg56% (9)
- Guia de Aprendizaje-QuantifiersDocument8 pagesGuia de Aprendizaje-Quantifiersangelita berdugoNo ratings yet
- Clean RoomDocument9 pagesClean Roomxyzscribd1988No ratings yet
- A Field Visit To Guheswari Waste Water TreatmentDocument16 pagesA Field Visit To Guheswari Waste Water TreatmentPraz Aarash0% (1)
- ISCDL - Problem Statements For State Level HackthonDocument6 pagesISCDL - Problem Statements For State Level HackthonSarvesh DubeyNo ratings yet
- 14th Jan 330pm NuptialsDocument30 pages14th Jan 330pm Nuptialsvivsubs18No ratings yet
- 2-Wire Transmitter Isolator / Current Isolator: ApplicationDocument2 pages2-Wire Transmitter Isolator / Current Isolator: Applicationm usersNo ratings yet
- Sig Decomp MproxDocument60 pagesSig Decomp MproxOri CarmiNo ratings yet
- Cost CurvesDocument2 pagesCost CurvesSumit Ray100% (1)
- Questionnaire CementDocument4 pagesQuestionnaire CementMere HamsafarNo ratings yet
- August 24, 2021 - OCW Song Line-Up - Shell VibalDocument9 pagesAugust 24, 2021 - OCW Song Line-Up - Shell VibalDennis GiananNo ratings yet
- DC Ammeter and VoltmeterDocument21 pagesDC Ammeter and VoltmeterSyed Shehryar AliNo ratings yet
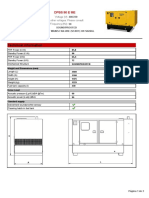
- Technical Information: Dpbs 90 E MeDocument3 pagesTechnical Information: Dpbs 90 E MeЛулу ТраедNo ratings yet