Download as pdf or txt
You might also like
- DKD R 5 1 e Resistance ThermometersDocument24 pagesDKD R 5 1 e Resistance Thermometersgustavoesanchez100% (6)
- CAT D6R2-Brochure PDFDocument24 pagesCAT D6R2-Brochure PDFalvaro gavrielNo ratings yet
- 10.14 PT Convex Lens PracticeDocument2 pages10.14 PT Convex Lens PracticeMuhamad Zahwan Anwar50% (2)
- Application of Direct Drive Wheel Motor For Fuel Cell Electric and Hybrid ElectricDocument7 pagesApplication of Direct Drive Wheel Motor For Fuel Cell Electric and Hybrid ElectricMirela VihacencuNo ratings yet
- Using The Right Motor For Your ProjectDocument3 pagesUsing The Right Motor For Your ProjectKULDEEP THAKURNo ratings yet
- Why Design With Direct Drive Technology?Document2 pagesWhy Design With Direct Drive Technology?ganeshNo ratings yet
- Brochure Frameless High Torque Motors - MI F18V1web STD ResDocument20 pagesBrochure Frameless High Torque Motors - MI F18V1web STD ResMuzakkir SharieffNo ratings yet
- Linear Motors ENDocument9 pagesLinear Motors ENIvan IntroNo ratings yet
- Linear Motors Catalog - ETELDocument9 pagesLinear Motors Catalog - ETEL5397573No ratings yet
- Collaborative Robots and Their Design ChallengesDocument11 pagesCollaborative Robots and Their Design Challenges徐海东No ratings yet
- Electro Mechanical System Design For Seating Systems IJERTV3IS070372Document5 pagesElectro Mechanical System Design For Seating Systems IJERTV3IS070372nitingahlawattNo ratings yet
- Frameless High Torque Motors: Product BrochureDocument20 pagesFrameless High Torque Motors: Product Brochurevivekcs11No ratings yet
- Torque Motors enDocument9 pagesTorque Motors enAbhishek AroraNo ratings yet
- Direct Drive DC Torque Motors Catalog 2005Document12 pagesDirect Drive DC Torque Motors Catalog 2005Itoitz Biain ArakistainNo ratings yet
- Permanent Magnet Motors Eliminate Gearboxes: Automation TechnologiesDocument4 pagesPermanent Magnet Motors Eliminate Gearboxes: Automation TechnologiesvictorhugomunozhNo ratings yet
- AC Drives Lead The Technical Revolution of Electric ForkliftsDocument7 pagesAC Drives Lead The Technical Revolution of Electric ForkliftsahmadNo ratings yet
- Electricwheelchair 4Document3 pagesElectricwheelchair 4Aswin KarthickNo ratings yet
- Komatsu Cargador Subterraneo Hibrido Joy 22hd EN PDFDocument5 pagesKomatsu Cargador Subterraneo Hibrido Joy 22hd EN PDFDavidMontenegro100% (1)
- 735 AEHQ5435 01 16pag - EngDocument16 pages735 AEHQ5435 01 16pag - EngOrrazip OilujNo ratings yet
- Understanding Inertia Ratio and Its Effect On Machine PerformanceDocument6 pagesUnderstanding Inertia Ratio and Its Effect On Machine PerformancemangyanNo ratings yet
- An Introduction To Plug-and-Play Motion SubsystemsDocument5 pagesAn Introduction To Plug-and-Play Motion SubsystemsIlija BozovicNo ratings yet
- Electromagnetic Braking SystemDocument3 pagesElectromagnetic Braking SystemJuhi KumariNo ratings yet
- Harmonic Drive Ebook 061614Document12 pagesHarmonic Drive Ebook 061614MayankDubeyNo ratings yet
- Starter Alternator MicroHybrid CarDocument7 pagesStarter Alternator MicroHybrid CartomNo ratings yet
- Application: Hard DrivesDocument5 pagesApplication: Hard Drivesقطب سيدNo ratings yet
- Design of Dynamic Balancing Machine 7a83bad5Document5 pagesDesign of Dynamic Balancing Machine 7a83bad5Wong Yong Jie100% (1)
- Trends in Modern Electrical DrivesDocument14 pagesTrends in Modern Electrical DrivesDivya Priyadharshini MohanNo ratings yet
- MotorsForEfficiency PDFDocument4 pagesMotorsForEfficiency PDFIngeniumDemNo ratings yet
- Torque Motors: Direct TechnologyDocument16 pagesTorque Motors: Direct TechnologymusafirNo ratings yet
- Prodotti 7 01703710Document9 pagesProdotti 7 01703710Julius RojoNo ratings yet
- Clutch Systems: For Passenger Cars Up To 800 NMDocument10 pagesClutch Systems: For Passenger Cars Up To 800 NMTavi PetrisorNo ratings yet
- LV Permanent Magnet Motors Fact FileDocument2 pagesLV Permanent Magnet Motors Fact Filemass72No ratings yet
- Cat - 793CDocument24 pagesCat - 793CEmily CamilaNo ratings yet
- Aehq6166 00Document28 pagesAehq6166 00AlbertoNo ratings yet
- 22hd Hybrid LoaderDocument5 pages22hd Hybrid LoaderAnonymous AaWiU0tJkNo ratings yet
- Irjet V8i3334Document3 pagesIrjet V8i3334Shahid AnwarNo ratings yet
- 312DDocument24 pages312DArley Diiaz100% (1)
- Articulated TrucksDocument16 pagesArticulated TrucksGuido MarconiNo ratings yet
- Introduction of Gears:: 1.2 Gears For Parallel ShaftsDocument16 pagesIntroduction of Gears:: 1.2 Gears For Parallel ShaftsnareshNo ratings yet
- Cat d9r BrochureDocument20 pagesCat d9r Brochureayush bansalNo ratings yet
- MPrathyusha PMounica GKalyani GPrashanthi VenkataPhaniBabuV 30Document9 pagesMPrathyusha PMounica GKalyani GPrashanthi VenkataPhaniBabuV 30Anonymous kZswaZ69oNo ratings yet
- Trilogy Linear Motor Engineering Reference GuideDocument12 pagesTrilogy Linear Motor Engineering Reference Guidequockhanh310No ratings yet
- Gearmotor Sizing Guide PDFDocument5 pagesGearmotor Sizing Guide PDFAnonymous Hy5Ir9QXNo ratings yet
- Recent Development and Advancement of Regenerative Braking in Electric BikeDocument4 pagesRecent Development and Advancement of Regenerative Braking in Electric BikeIJMTST-Online JournalNo ratings yet
- Guide To Stepper Motor SelectionDocument3 pagesGuide To Stepper Motor SelectionAnonymous zkYS7cNo ratings yet
- Steer by Wire Systems Integrated Torque Feedback TaenDocument5 pagesSteer by Wire Systems Integrated Torque Feedback TaenPhúc KhangNo ratings yet
- Brush-Less DC Motor Drive For Steer-By-Wire Electric Power Steering ApplicationsDocument8 pagesBrush-Less DC Motor Drive For Steer-By-Wire Electric Power Steering ApplicationsJessi MarieNo ratings yet
- Motors: Ratings and SpecificationsDocument8 pagesMotors: Ratings and SpecificationsSoumen BanerjeeNo ratings yet
- W Defa3763Document22 pagesW Defa3763Jerish JohnNo ratings yet
- Product Development Project: Rudra Prasad Patra, 119ME0367Document25 pagesProduct Development Project: Rudra Prasad Patra, 119ME0367Ashish Kumar SahuNo ratings yet
- Gear Box EffisiensiDocument2 pagesGear Box EffisiensiNakkolopNo ratings yet
- Cat 785DDocument24 pagesCat 785DDavyda VedaNo ratings yet
- Review On Design Basics of Industrial Application Gear BoxDocument7 pagesReview On Design Basics of Industrial Application Gear BoxjeetNo ratings yet
- 725 AEHQ5394 02 16pag - EngDocument16 pages725 AEHQ5394 02 16pag - EngOrrazip OilujNo ratings yet
- 0117 CumminsDocument8 pages0117 Cumminsranim najibNo ratings yet
- XCMG SS XC958 Loader Brochure MinDocument6 pagesXCMG SS XC958 Loader Brochure MinabangNo ratings yet
- Design and Analysis of Composite Spur GeDocument12 pagesDesign and Analysis of Composite Spur GeMani MaranNo ratings yet
- Cat 789c PDFDocument28 pagesCat 789c PDFzugupubexe0% (1)
- Regenerative Braking SystemDocument23 pagesRegenerative Braking SystemAnkit BurnwalNo ratings yet
- Electric Transaxle White PaperDocument6 pagesElectric Transaxle White PaperTechnipower Systems100% (1)
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- 18-0022 Elliot JA22Document33 pages18-0022 Elliot JA22basemNo ratings yet
- Micro EmulsionDocument39 pagesMicro EmulsionDuc Anh NguyenNo ratings yet
- Soil ResistivityDocument8 pagesSoil ResistivitySioik DmNo ratings yet
- Mcgregor 1996Document13 pagesMcgregor 1996Alrayyan RashidNo ratings yet
- Corrosion of Steel Reinforcement: C. AndradeDocument32 pagesCorrosion of Steel Reinforcement: C. AndradePritha DasNo ratings yet
- Govt - Polytechnic, Beed. 2021-22: CertificateDocument9 pagesGovt - Polytechnic, Beed. 2021-22: CertificateUttareshwarNo ratings yet
- Flow Through Circular PipesDocument105 pagesFlow Through Circular PipesArchangel VenantNo ratings yet
- Metal FoamsDocument135 pagesMetal FoamsShahzaib B. AbbasiNo ratings yet
- AASHTO LRFDLTS-1-I5-2015 (2022 Interim Revisions) .Document88 pagesAASHTO LRFDLTS-1-I5-2015 (2022 Interim Revisions) .tracyhopyNo ratings yet
- Undergraduate Physics: Lecture Notes OnDocument269 pagesUndergraduate Physics: Lecture Notes OniHitesh YTNo ratings yet
- Phase Solubility Diagrams of Cocrystals Are Explained by Solubility Product and Solution ComplexationDocument9 pagesPhase Solubility Diagrams of Cocrystals Are Explained by Solubility Product and Solution Complexationnayodow375No ratings yet
- Jonasson and Storeheier - 2001 - Nord 2000. New Nordic Prediction Method For Rail TDocument51 pagesJonasson and Storeheier - 2001 - Nord 2000. New Nordic Prediction Method For Rail TDiego Villalobos S.No ratings yet
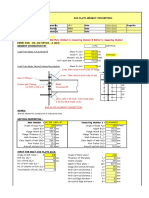
- End Plate Beam To Column Moment ConnectionDocument84 pagesEnd Plate Beam To Column Moment ConnectionNguyen Duc CuongNo ratings yet
- Determination of The Initial Surface Absorption of Concrete BS 1881 - Part 208Document8 pagesDetermination of The Initial Surface Absorption of Concrete BS 1881 - Part 208Sreenath Menon KNo ratings yet
- Constructing A Plastic Bottle Wind Turbine As A Practical Aid For Learning About Using Wind Energy To Generate ElectricityDocument6 pagesConstructing A Plastic Bottle Wind Turbine As A Practical Aid For Learning About Using Wind Energy To Generate Electricityjunior_mecanicaNo ratings yet
- Green SaNDDocument7 pagesGreen SaNDMuhamad AnwarNo ratings yet
- Scaffold Development Using 3D Printing With A Starch-Bsed PolymerDocument8 pagesScaffold Development Using 3D Printing With A Starch-Bsed PolymerLucas BaruzoNo ratings yet
- Explain The Concepts Behind Bradford Method in Measuring Protein Concentration in A SolutionDocument4 pagesExplain The Concepts Behind Bradford Method in Measuring Protein Concentration in A SolutionRiri ShinNo ratings yet
- Commercial Hot Water and Space Heating v7Document4 pagesCommercial Hot Water and Space Heating v7stomakosNo ratings yet
- Black OilDocument70 pagesBlack OilsandaflorNo ratings yet
- Group 3 Fission-Track Dating: 1. DefinitionDocument3 pagesGroup 3 Fission-Track Dating: 1. DefinitionXavier AbainzaNo ratings yet
- Chiller Everin Mitra PerkasaDocument8 pagesChiller Everin Mitra PerkasaIwan SetiawanNo ratings yet
- Laser Alignment Systems For Shafts, Turbines, and MachinesDocument16 pagesLaser Alignment Systems For Shafts, Turbines, and MachinesMarcosNo ratings yet
- 785d Hydraulic PDFDocument2 pages785d Hydraulic PDFJPJFNo ratings yet
- Specification of Hydraulic Power Pack and Pneumatic Service Unit (FRL Unit)Document12 pagesSpecification of Hydraulic Power Pack and Pneumatic Service Unit (FRL Unit)Paren Trivedi77% (13)
- FWG ALFA LAVAL Type VSP-36-125CC-SWCDocument284 pagesFWG ALFA LAVAL Type VSP-36-125CC-SWCArtjomsNo ratings yet
- Magnetics 2021 Ferrite CatalogDocument76 pagesMagnetics 2021 Ferrite CatalogFAKHAR NAVEEDNo ratings yet
- Corrugated Plate InterceptorDocument8 pagesCorrugated Plate InterceptorTech Manager100% (1)