Download as pdf or txt
You might also like
- Appointment Setters ContractDocument2 pagesAppointment Setters Contractsherman60% (5)
- Asd 3Document9 pagesAsd 3argetrNo ratings yet
- Gait & Posture: Erik A. Wikstrom, Kimberly A. Fournier, Patrick O. MckeonDocument5 pagesGait & Posture: Erik A. Wikstrom, Kimberly A. Fournier, Patrick O. MckeonMonikaNo ratings yet
- Defining The Medial-Lateral Axis of An Anatomical Femur Coordinate System Using Freehand 3D Ultrasound Imaging.Document6 pagesDefining The Medial-Lateral Axis of An Anatomical Femur Coordinate System Using Freehand 3D Ultrasound Imaging.Ricardo IllaNo ratings yet
- 151 Effects of Physiotherapy Treatment On Knee Oa Gai 2009 Osteoarthritis AnDocument2 pages151 Effects of Physiotherapy Treatment On Knee Oa Gai 2009 Osteoarthritis AnEmad Tawfik AhmadNo ratings yet
- 1992 A Biomechanical Analysis of PALLOFEMORALDocument5 pages1992 A Biomechanical Analysis of PALLOFEMORALValentina LedzmaNo ratings yet
- Relative Contribution of The Pressure Variations Under The Feet and Body Weight Distribution Over Both Legs in The Control of Upright StanceDocument6 pagesRelative Contribution of The Pressure Variations Under The Feet and Body Weight Distribution Over Both Legs in The Control of Upright StancedavidutadNo ratings yet
- Journal of Biomechanics: J. Favre, R. Aissaoui, B.M. Jolles, J.A. de Guise, K. AminianDocument6 pagesJournal of Biomechanics: J. Favre, R. Aissaoui, B.M. Jolles, J.A. de Guise, K. Aminianconstantinescuana200No ratings yet
- Asd 2Document11 pagesAsd 2argetrNo ratings yet
- 20-2007 - Kadoury Et AlDocument12 pages20-2007 - Kadoury Et AlJuan Pablo Romero CamposNo ratings yet
- Chao 1973Document14 pagesChao 1973Suman DasNo ratings yet
- Tibial Plateau Fractures Classifications ODLICANDocument12 pagesTibial Plateau Fractures Classifications ODLICANana starcevicNo ratings yet
- Komoda Wagatsuma2017Document31 pagesKomoda Wagatsuma2017VikNo ratings yet
- Kinematic Analysis of A Six-Degree-Of-Freedom Model Based On ISB Recommendation A Repeatability Analysis and Comparison With Convetional Gait ModelDocument9 pagesKinematic Analysis of A Six-Degree-Of-Freedom Model Based On ISB Recommendation A Repeatability Analysis and Comparison With Convetional Gait ModelLaura VNo ratings yet
- Computational Models For Trunk Trajectory Planning and Load Distribution: A Test-Bed For Studying Various Clinical Adaptation and Motor Control Strategies of Low Back Pain PatientsDocument13 pagesComputational Models For Trunk Trajectory Planning and Load Distribution: A Test-Bed For Studying Various Clinical Adaptation and Motor Control Strategies of Low Back Pain PatientsOTorresGonzalezNo ratings yet
- The Use of Cardiac CT Qcquisition Mode For Dynamic Musculoskeletal Imaging 2022Document10 pagesThe Use of Cardiac CT Qcquisition Mode For Dynamic Musculoskeletal Imaging 2022Minh NgọcNo ratings yet
- Kanko Et Al 2021 - Concurrent Assessment of Gait Kinematics Using Marker-Based and Markerless Motion CaptureDocument7 pagesKanko Et Al 2021 - Concurrent Assessment of Gait Kinematics Using Marker-Based and Markerless Motion CaptureFábio LanferdiniNo ratings yet
- Sagittal Spine Posture Assessment: Feasibility of A Protocol Based On Intersegmental MomentsDocument5 pagesSagittal Spine Posture Assessment: Feasibility of A Protocol Based On Intersegmental MomentsVizaNo ratings yet
- Force-Controlled Biting Alters Postural Control in BipedalDocument13 pagesForce-Controlled Biting Alters Postural Control in BipedalSamNo ratings yet
- Le Hanne Ur 2018Document9 pagesLe Hanne Ur 2018Gabriel Arturo Lorca OsorioNo ratings yet
- Cavallo - CAPESB 2021Document2 pagesCavallo - CAPESB 2021tanvir anwarNo ratings yet
- Reliability and Validity of Standing Balance Measurements With A Motion Analysis SystemDocument8 pagesReliability and Validity of Standing Balance Measurements With A Motion Analysis SystemAgus TinaNo ratings yet
- Royal Stata Society Series C - 2022 - Lazarus - Improving Cardio Mechanic Inference by Combining in Vivo Strain Data WithDocument26 pagesRoyal Stata Society Series C - 2022 - Lazarus - Improving Cardio Mechanic Inference by Combining in Vivo Strain Data WithJuan Fernando SubiranaNo ratings yet
- Medical Engineering & PhysicsDocument7 pagesMedical Engineering & PhysicsebrahimpanNo ratings yet
- Status of Activator Methods Chiropractic PDFDocument20 pagesStatus of Activator Methods Chiropractic PDFWanniely KussNo ratings yet
- Cardan AnglesDocument8 pagesCardan Anglesangelicamaria_647609No ratings yet
- Nüesch 2017Document24 pagesNüesch 2017AFoqsdifNo ratings yet
- Deep Learning For Automated Segmentation of Pelvic Muscles, FatDocument9 pagesDeep Learning For Automated Segmentation of Pelvic Muscles, FatLuma GallacioNo ratings yet
- Comparative Biomechanical Analysis of The Rotation PDFDocument9 pagesComparative Biomechanical Analysis of The Rotation PDFAdam Luqman Bin AshbakhriNo ratings yet
- A Method To Analyze Dynamics Properties of Transfemoral ProsthesisDocument5 pagesA Method To Analyze Dynamics Properties of Transfemoral ProsthesisNada GhammemNo ratings yet
- PIIS2352344120300613Document5 pagesPIIS2352344120300613yu prdnyaNo ratings yet
- 0000113Document5 pages0000113Christina LushchynskaNo ratings yet
- Uma Revisao Sistematica e Meta-Analise Do Efeito de Umaortese Tornozelo-Pe Na Biomecanica Da Marcha Apos o AVCDocument14 pagesUma Revisao Sistematica e Meta-Analise Do Efeito de Umaortese Tornozelo-Pe Na Biomecanica Da Marcha Apos o AVCBárbara MartinsNo ratings yet
- Orthopaedics & Traumatology: Surgery & ResearchDocument7 pagesOrthopaedics & Traumatology: Surgery & ResearchMohan DesaiNo ratings yet
- An Automated Pelvic Bone Geometrical Feature Measurement Utilities On CT ScanningDocument7 pagesAn Automated Pelvic Bone Geometrical Feature Measurement Utilities On CT ScanningInternational Organization of Scientific Research (IOSR)No ratings yet
- Chapter OneDocument17 pagesChapter OnebkrmnbxbjtNo ratings yet
- Biomechanical Investigations of Sound and Prosthetic GaitDocument11 pagesBiomechanical Investigations of Sound and Prosthetic GaitguessguessNo ratings yet
- Cios 13 1Document9 pagesCios 13 1Sugumar NatarajanNo ratings yet
- Deep Neural Network For Automatic Volumetric Segmentation of Whole-Body CT Images For Body Composition AssessmentDocument9 pagesDeep Neural Network For Automatic Volumetric Segmentation of Whole-Body CT Images For Body Composition AssessmentLuma GallacioNo ratings yet
- Support Vector Machines For Aerobis Fitness Predicton of Athletes - Kerem OzgunenDocument7 pagesSupport Vector Machines For Aerobis Fitness Predicton of Athletes - Kerem OzgunenKoray ElçikNo ratings yet
- Adaptive Compliance Shaping With Human Impedance EstimationDocument8 pagesAdaptive Compliance Shaping With Human Impedance EstimationLuis SentisNo ratings yet
- A Practical Approach For The Linearization of TheDocument21 pagesA Practical Approach For The Linearization of TheacarrascotaberaNo ratings yet
- A Methode For The Determination of Cog DuringDocument7 pagesA Methode For The Determination of Cog Duringupm.polankaNo ratings yet
- Computer Vision System For Human Anthropometric PaDocument11 pagesComputer Vision System For Human Anthropometric PaalexNo ratings yet
- Gait & Posture: Full Length ArticleDocument7 pagesGait & Posture: Full Length ArticleMKNo ratings yet
- De La Zerda 2007 Formulating Adaptive Radiation Therapy (ART) Treatment Planning Into A Closed-Loop Control Framework PDFDocument17 pagesDe La Zerda 2007 Formulating Adaptive Radiation Therapy (ART) Treatment Planning Into A Closed-Loop Control Framework PDFBenNo ratings yet
- HCA220 Appendix DDocument2 pagesHCA220 Appendix DAnnieNo ratings yet
- Total Knee Replacement Wear DuringDocument8 pagesTotal Knee Replacement Wear DuringRob GNNo ratings yet
- 2015 Schmitz FOCUSED AND RADIAL Shockwave For Musculoskeletal, More SmilaritiesDocument2 pages2015 Schmitz FOCUSED AND RADIAL Shockwave For Musculoskeletal, More SmilaritieskangmasNo ratings yet
- XDocument6 pagesXShelaErlanggaPutriNo ratings yet
- Tupling 1987 Cardan AnglesDocument6 pagesTupling 1987 Cardan Anglesdanasolav1798No ratings yet
- Andriacchi 1998 PCTDocument7 pagesAndriacchi 1998 PCTdanasolav1798No ratings yet
- O RADS Meta - Analysis - Ry220795suppa1Document3 pagesO RADS Meta - Analysis - Ry220795suppa1nguyenthanhhai0974backup02No ratings yet
- A Leg Exoskeleton Command Unit For Human Walking RehabilitationDocument6 pagesA Leg Exoskeleton Command Unit For Human Walking RehabilitationsujinaNo ratings yet
- KINOVEA - Reliability of Kinovea® Software and AgreementDocument12 pagesKINOVEA - Reliability of Kinovea® Software and AgreementTiago MarcheseNo ratings yet
- Muscle Activity Internal Loads and StabiDocument10 pagesMuscle Activity Internal Loads and StabiDavid Antonio Moreno BarragánNo ratings yet
- A Novel System For The 3-D Reconstruction of The Human Spine and Rib Cage From Biplanar X-Ray ImagesDocument3 pagesA Novel System For The 3-D Reconstruction of The Human Spine and Rib Cage From Biplanar X-Ray ImagesBrian FoxNo ratings yet
- ISB Recommendation On Definitions of Joint Coordinate Systems of Various Joints For The Reporting of Human Joint Motion - Part II Shoulder, Elbow, Wrist and HandDocument12 pagesISB Recommendation On Definitions of Joint Coordinate Systems of Various Joints For The Reporting of Human Joint Motion - Part II Shoulder, Elbow, Wrist and HandAnonymous YePlm1vHz7No ratings yet
- Medical Coding ICD-10-PCS: a QuickStudy Laminated Reference GuideFrom EverandMedical Coding ICD-10-PCS: a QuickStudy Laminated Reference GuideNo ratings yet
- Cardiac Electrophysiology Without FluoroscopyFrom EverandCardiac Electrophysiology Without FluoroscopyRiccardo ProiettiNo ratings yet
- IELTS Writing Task 2 Model EssayDocument1 pageIELTS Writing Task 2 Model EssayliyaNo ratings yet
- CHAP1Document10 pagesCHAP1Andre HigginsNo ratings yet
- Fujitsu LifeBook S7110 - S7111 Rev03 Schematic DiagramDocument91 pagesFujitsu LifeBook S7110 - S7111 Rev03 Schematic DiagramWell Well WellNo ratings yet
- Bulk Sms Imp DataDocument12 pagesBulk Sms Imp DataSATISH WORDBOXNo ratings yet
- Quality Improvement of Corn Husk As Raw Material For Textile ProductsDocument5 pagesQuality Improvement of Corn Husk As Raw Material For Textile ProductsIngrid ContrerasNo ratings yet
- Department of The Interior and Local Government Bureau of Fire ProtectionDocument5 pagesDepartment of The Interior and Local Government Bureau of Fire ProtectionBoy ClementeNo ratings yet
- Callisto SPC: Technical SpecificationsDocument3 pagesCallisto SPC: Technical SpecificationsLuis Miguel Figueroa Quiroz “Luis Figueroa”No ratings yet
- Finite Element Analysis of EBW Welded Joint Using SysweldDocument6 pagesFinite Element Analysis of EBW Welded Joint Using Sysweldamd mhmNo ratings yet
- CL202: Introduction To Data Analysis: Mani Bhushan, Sachin PatwardhanDocument17 pagesCL202: Introduction To Data Analysis: Mani Bhushan, Sachin PatwardhanSWAPNIL GUDMALWAR PGP 2020 BatchNo ratings yet
- Megashor Metric - Rev H - Email VersionDocument93 pagesMegashor Metric - Rev H - Email VersionEstebanLopezNo ratings yet
- Combined Paging and SegmentationDocument3 pagesCombined Paging and SegmentationAditya MishraNo ratings yet
- Track and Trace Your Delivery STDocument1 pageTrack and Trace Your Delivery STRufaizaNo ratings yet
- FiberCable 2 V8 56 Oct20Document288 pagesFiberCable 2 V8 56 Oct20Ronald N Meza CNo ratings yet
- CMR Form TemplateDocument4 pagesCMR Form TemplateJosh F. YuNo ratings yet
- Tanap Trans Anatolian Natural Gas Pipeline Project: Piping Welding Specification (Asme B31.3)Document36 pagesTanap Trans Anatolian Natural Gas Pipeline Project: Piping Welding Specification (Asme B31.3)Suparerk SirivedinNo ratings yet
- Chi-Square Test of IndependenceDocument3 pagesChi-Square Test of IndependenceABHIJIT S. SARKARNo ratings yet
- 7UT6 Catalog SIP E6Document45 pages7UT6 Catalog SIP E6unnati.sharmaNo ratings yet
- Trelleborg o Ring GB enDocument226 pagesTrelleborg o Ring GB enGabor CsomóNo ratings yet
- Sony - Micro System - Cmthpz9Document40 pagesSony - Micro System - Cmthpz9SoniaSegerMercedesNo ratings yet
- TSG - MGB Ver 2 04Document191 pagesTSG - MGB Ver 2 04Сергей ХрамовNo ratings yet
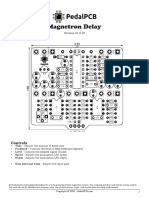
- Magnetron Delay: Revision 10.13.20Document5 pagesMagnetron Delay: Revision 10.13.20manecolooperNo ratings yet
- Weddingday Font Billy Argel Fonts FontSpaceDocument1 pageWeddingday Font Billy Argel Fonts FontSpaceStacey MutesiNo ratings yet
- School Quality Assessment and Assurance Framework: Central Board of Secondary EducationDocument300 pagesSchool Quality Assessment and Assurance Framework: Central Board of Secondary EducationPolice DAV Public SchoolNo ratings yet
- EPSON - RC90 - Controller - Manual (Use With EPSON RC+ 7.0) (R6)Document226 pagesEPSON - RC90 - Controller - Manual (Use With EPSON RC+ 7.0) (R6)Muhammad MuhsinNo ratings yet
- KEMPER PROFILER Addendum 8.5 (English)Document212 pagesKEMPER PROFILER Addendum 8.5 (English)Daniel ChagasNo ratings yet
- Genral Final With New Questions To READDocument83 pagesGenral Final With New Questions To READRobin HillsonNo ratings yet
- 10 1016@j Optmat 2019 109433Document10 pages10 1016@j Optmat 2019 109433khannoussi kamiliaNo ratings yet
- Catalog 2024 - Rom Honey - Meli Feli - PreviewDocument18 pagesCatalog 2024 - Rom Honey - Meli Feli - PreviewcecautituincasameaNo ratings yet
- CFDDocument10 pagesCFDThiam Chun Ong100% (1)