
Microcontroller Notes-1
Microcontroller Notes-1
You might also like
- Física para Ciencias e Ingeniería, Volumen 2 (2, 9na Edición) (Solucionario) - CompressedDocument1,239 pagesFísica para Ciencias e Ingeniería, Volumen 2 (2, 9na Edición) (Solucionario) - Compressedjesus herazoNo ratings yet
- Electric Power Distribution Systems - F.C. ChanDocument9 pagesElectric Power Distribution Systems - F.C. ChanPVV RAMA RAONo ratings yet
- Module 1 8051 Microcontroller 1Document52 pagesModule 1 8051 Microcontroller 1unknownwalkernaunknownwalkernaNo ratings yet
- Mecha Unit IIDocument96 pagesMecha Unit IICAD With RaoNo ratings yet
- Pcel4303 Microprocessor & Micro Controllers: MODULE - I (10 Hours)Document35 pagesPcel4303 Microprocessor & Micro Controllers: MODULE - I (10 Hours)sramukNo ratings yet
- UNIT I MicroprocessorDocument130 pagesUNIT I MicroprocessorAlok KumarNo ratings yet
- Microcontrollers Applications Solved Questions AnswersDocument60 pagesMicrocontrollers Applications Solved Questions AnswersThe walkerNo ratings yet
- Microprocessor Notes Pruvanchal UniversityDocument84 pagesMicroprocessor Notes Pruvanchal UniversityNika Unav100% (1)
- Chapter 2 - 2Document47 pagesChapter 2 - 2JeronimoNo ratings yet
- Microprocessor Architecture Eng. Kibwika N Bashir: Introduction To Microprocessors Chapter 2 1Document47 pagesMicroprocessor Architecture Eng. Kibwika N Bashir: Introduction To Microprocessors Chapter 2 1ElenNo ratings yet
- Microprocessor FINALDocument8 pagesMicroprocessor FINALbocemay268No ratings yet
- Microprocessor Architecture Programming and Its Application With 8085Document56 pagesMicroprocessor Architecture Programming and Its Application With 8085sanjoy banerjeeNo ratings yet
- Microprocessor ArchitectureDocument80 pagesMicroprocessor Architectureboniface ChosenNo ratings yet
- Microprocessor AllDocument84 pagesMicroprocessor Allcodingwallah0No ratings yet
- Embedded System Unit 1 (VTU)Document20 pagesEmbedded System Unit 1 (VTU)GucciNo ratings yet
- Microprocessor and ControllerDocument18 pagesMicroprocessor and ControllerSai Murali SirapuNo ratings yet
- Unit 3 Micro Controllers: Intel 8051: RV College of EngineeringDocument28 pagesUnit 3 Micro Controllers: Intel 8051: RV College of EngineeringRiya Shetty B HNo ratings yet
- Microprocessor I - Lecture 02Document45 pagesMicroprocessor I - Lecture 02Omar Mohamed Farag Abd El FattahNo ratings yet
- Introduction Microcontrollers 08Document71 pagesIntroduction Microcontrollers 08Proff Moffat JamesNo ratings yet
- 3 (Unit-1) 15997479505f5a376ec32e8Document55 pages3 (Unit-1) 15997479505f5a376ec32e8Leah DesharNo ratings yet
- 8085 Microprocessor Architecture - Copy - To PrintDocument7 pages8085 Microprocessor Architecture - Copy - To PrintJANELLA ROSE BITANGNo ratings yet
- 3 MicrocontrollersDocument28 pages3 MicrocontrollersRynefel ElopreNo ratings yet
- 8051 FullDocument69 pages8051 FullMazo Ahmed ShiponNo ratings yet
- Buses Buses Buses: Von Neumann Architecture: Von Neumann Architecture: Von Neumann ArchitectureDocument5 pagesBuses Buses Buses: Von Neumann Architecture: Von Neumann Architecture: Von Neumann ArchitectureShiuli BarmanNo ratings yet
- FALLSEM2020-21 ECE3003 ETH VL2020210101906 Reference Material II 17-Jul-2020 ARCHITECTURE OF 8085Document14 pagesFALLSEM2020-21 ECE3003 ETH VL2020210101906 Reference Material II 17-Jul-2020 ARCHITECTURE OF 8085Deepak SomiNo ratings yet
- Presentation 1Document15 pagesPresentation 1kalash satypalNo ratings yet
- Microprocessor Architecture and Memory: By: Farhan Aziz AP, Department of ECE BSACET, MathuraDocument61 pagesMicroprocessor Architecture and Memory: By: Farhan Aziz AP, Department of ECE BSACET, MathuraFarhan AzizNo ratings yet
- Chapter 2 - Embedded System ProcessorsDocument7 pagesChapter 2 - Embedded System ProcessorsStephanie CalabungNo ratings yet
- 2-Introduction To Microprocessors & Microcontrollers-12-12-2022Document16 pages2-Introduction To Microprocessors & Microcontrollers-12-12-2022BRO CUBIESNo ratings yet
- Microprossor Chapter 1Document49 pagesMicroprossor Chapter 1bayabayechaNo ratings yet
- Module - 1Document41 pagesModule - 1ManjuanthNo ratings yet
- SEC1310Document169 pagesSEC1310Su YeeNo ratings yet
- Short Answer Questions and Answers: Abhijith AugustineDocument90 pagesShort Answer Questions and Answers: Abhijith AugustineANIRUDDHA PAULNo ratings yet
- Processor Architecture 2Document67 pagesProcessor Architecture 2patolesahil9371No ratings yet
- WINSEM2022-23 BECE204L TH VL2022230500878 2022-12-13 Reference-Material-IDocument27 pagesWINSEM2022-23 BECE204L TH VL2022230500878 2022-12-13 Reference-Material-IAshwin Raj 21BEC0400No ratings yet
- New 8051 MeterialDocument113 pagesNew 8051 Meterialpraneeth saiNo ratings yet
- 57 Ma NotesDocument21 pages57 Ma NotesKajal GoudNo ratings yet
- 1.introduction To Microprocessor of 8085 - 2024Document77 pages1.introduction To Microprocessor of 8085 - 2024sanchita4586No ratings yet
- MP Manual 2Document73 pagesMP Manual 2Subir ShresthaNo ratings yet
- Mpi Unit 1Document27 pagesMpi Unit 1godhanipriyank8No ratings yet
- 1 - Microcontroller Vs MicroprocessorDocument19 pages1 - Microcontroller Vs MicroprocessorLong NguyenNo ratings yet
- Lecture 2 - Typical Embedded SystemDocument5 pagesLecture 2 - Typical Embedded SystemrhodonelduatinNo ratings yet
- MC Mod 1Document38 pagesMC Mod 1BOBAN05No ratings yet
- Module - 1: 1.1 Microprocessors V/S MicrocontrollersDocument10 pagesModule - 1: 1.1 Microprocessors V/S MicrocontrollersPushpa Latha100% (1)
- Rakesh - Saxena@gitjaipur - Com 31303122020045036pmDocument52 pagesRakesh - Saxena@gitjaipur - Com 31303122020045036pmBadrinathNo ratings yet
- 5.1 - Microcontroller and Microprocessor ArchitectureDocument35 pages5.1 - Microcontroller and Microprocessor ArchitectureWinter NaiNo ratings yet
- 2 Marks MicroprocessorDocument17 pages2 Marks MicroprocessorShreyaNo ratings yet
- 1.8051 MicrocontrollerDocument34 pages1.8051 MicrocontrollervanithaNo ratings yet
- 1 Course Material - All Chapter 04-01-2024Document148 pages1 Course Material - All Chapter 04-01-2024RU MATH GamerNo ratings yet
- Unit 1B Typical Emb SysDocument52 pagesUnit 1B Typical Emb SysNandan BallaNo ratings yet
- MPI Unit 1Document20 pagesMPI Unit 1devanshpatel0144No ratings yet
- Microcontrollers and ApplicationsDocument254 pagesMicrocontrollers and ApplicationsArivukkarasan RajaNo ratings yet
- WINSEM2023-24 BECE204L TH VL2023240505477 2024-01-05 Reference-Material-IDocument22 pagesWINSEM2023-24 BECE204L TH VL2023240505477 2024-01-05 Reference-Material-Idevanshshukla577No ratings yet
- MC Unit 1 NON CAMPUSDocument18 pagesMC Unit 1 NON CAMPUSSangamesh V AngadiNo ratings yet
- Lecture OneDocument36 pagesLecture OneMworozi DicksonNo ratings yet
- CS3691 EMBEDDED SYSTEMS AND IOTl 1 To 4 UnitDocument265 pagesCS3691 EMBEDDED SYSTEMS AND IOTl 1 To 4 Unitthamizhini senthilNo ratings yet
- مسيطرات كاملDocument101 pagesمسيطرات كاملahmed aliraqiNo ratings yet
- ACFrOgDAR Cu e5isfc2CgeNPpt5E9-5veyuZNn4IjAKG3dq78MB8ONG5U9dwpDia9pn6pMQTEGKcEbp5NtUFZjVLjXdVN OQ9GEEFhG4y9MrWgKHHpIBh TnSNS4zPz7CGk0JPJJloUzbEBIC05Document122 pagesACFrOgDAR Cu e5isfc2CgeNPpt5E9-5veyuZNn4IjAKG3dq78MB8ONG5U9dwpDia9pn6pMQTEGKcEbp5NtUFZjVLjXdVN OQ9GEEFhG4y9MrWgKHHpIBh TnSNS4zPz7CGk0JPJJloUzbEBIC05Arjun KelothuNo ratings yet
- CS3691 EMBEDDED SYSTEMS AND IOTl 1 To 4 UnitDocument254 pagesCS3691 EMBEDDED SYSTEMS AND IOTl 1 To 4 Unitarunkrishnaaiswarya108No ratings yet
- How Does A Microprocessor Work?: Then, We Will See The Terminologies Used in A MicroprocessorDocument4 pagesHow Does A Microprocessor Work?: Then, We Will See The Terminologies Used in A MicroprocessorsivaeeinfoNo ratings yet
- Microcontroller 8051Document31 pagesMicrocontroller 8051Munazza FatmaNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Electrical Maintenance ManualDocument2 pagesElectrical Maintenance Manualkurnia_te3769No ratings yet
- SymphoniePRO® Data Logger - 26 CH & 16 CHDocument7 pagesSymphoniePRO® Data Logger - 26 CH & 16 CHAni dwi OctaviaNo ratings yet
- Tlp250 Application NoteDocument7 pagesTlp250 Application NoteHeriberto Flores Ampie100% (1)
- Working SafetyDocument8 pagesWorking SafetyBat GurtNo ratings yet
- DC-Jumper Cable - 2x6 Mm2 48 V YSLYCYDocument1 pageDC-Jumper Cable - 2x6 Mm2 48 V YSLYCYChusé Antón Burillo ArbejNo ratings yet
- Luzon Grid Loepp-08312022Document5 pagesLuzon Grid Loepp-08312022KianNo ratings yet
- Protective DevicesDocument4 pagesProtective DevicesKantharaj ChinnappaNo ratings yet
- Mov-14Dxxxk Series - Metal Oxide Varistor: Features ApplicationsDocument4 pagesMov-14Dxxxk Series - Metal Oxide Varistor: Features ApplicationsFrancisco HernandezNo ratings yet
- Tle5205 2Document23 pagesTle5205 2Richard MachadoNo ratings yet
- Osram Substitube BasicDocument4 pagesOsram Substitube Basicatnkpr_vn9368No ratings yet
- St2712w LaboratoriumDocument86 pagesSt2712w LaboratoriumAnkit DesaiNo ratings yet
- TIG 200 Pulse AC/DC Mini Digital (JT-200DS)Document32 pagesTIG 200 Pulse AC/DC Mini Digital (JT-200DS)bobisaNo ratings yet
- Science Learning Center University of Michigan - Dearborn: Use of The OscilloscopeDocument49 pagesScience Learning Center University of Michigan - Dearborn: Use of The OscilloscopeAlex ZadicNo ratings yet
- VT1730 PDFDocument161 pagesVT1730 PDFCristian BobaruNo ratings yet
- Time Borrow LatchDocument4 pagesTime Borrow LatchSachin TanejaNo ratings yet
- VIBXPERT - EX - Catalog - en ManualDocument61 pagesVIBXPERT - EX - Catalog - en ManualnguyennhatbaoNo ratings yet
- Fdas Technical Specs PDFDocument10 pagesFdas Technical Specs PDFotadoyreychie31No ratings yet
- Choke Coil PanasonicDocument2 pagesChoke Coil Panasonicmautron1213No ratings yet
- Moxa Eds 208a Series DatasheetDocument5 pagesMoxa Eds 208a Series DatasheetKourosh DavallouNo ratings yet
- T320XVN02 0-AuoDocument32 pagesT320XVN02 0-Auopeterson_msc5100% (1)
- DP7645III User's ManualDocument6 pagesDP7645III User's ManualMuh Qadri TappiNo ratings yet
- Manual UPS HPH 20-30-40kVA en UsDocument66 pagesManual UPS HPH 20-30-40kVA en Usjamilsoria100% (3)
- Li PolymerDocument7 pagesLi PolymerFanny NameNo ratings yet
- Display 090920122425 Phpapp01 PDFDocument37 pagesDisplay 090920122425 Phpapp01 PDFNihar PandaNo ratings yet
- YT-2500 Smart PositionerDocument43 pagesYT-2500 Smart Positionermsalem73No ratings yet
- Service and Diagnostics 611ADocument11 pagesService and Diagnostics 611ARubens MartinsNo ratings yet
- Automation and Relay Functions - Catalogue 2003.12Document273 pagesAutomation and Relay Functions - Catalogue 2003.12Sarah RichardNo ratings yet
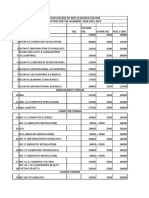
- Hindusthan College of Arts & Science College Fees Structure For The Academic Year 2021-2022Document7 pagesHindusthan College of Arts & Science College Fees Structure For The Academic Year 2021-2022Libin JoNo ratings yet

























































































Download as pdf or txt
You might also like
- Física para Ciencias e Ingeniería, Volumen 2 (2, 9na Edición) (Solucionario) - CompressedDocument1,239 pagesFísica para Ciencias e Ingeniería, Volumen 2 (2, 9na Edición) (Solucionario) - Compressedjesus herazoNo ratings yet
- Electric Power Distribution Systems - F.C. ChanDocument9 pagesElectric Power Distribution Systems - F.C. ChanPVV RAMA RAONo ratings yet
- Module 1 8051 Microcontroller 1Document52 pagesModule 1 8051 Microcontroller 1unknownwalkernaunknownwalkernaNo ratings yet
- Mecha Unit IIDocument96 pagesMecha Unit IICAD With RaoNo ratings yet
- Pcel4303 Microprocessor & Micro Controllers: MODULE - I (10 Hours)Document35 pagesPcel4303 Microprocessor & Micro Controllers: MODULE - I (10 Hours)sramukNo ratings yet
- UNIT I MicroprocessorDocument130 pagesUNIT I MicroprocessorAlok KumarNo ratings yet
- Microcontrollers Applications Solved Questions AnswersDocument60 pagesMicrocontrollers Applications Solved Questions AnswersThe walkerNo ratings yet
- Microprocessor Notes Pruvanchal UniversityDocument84 pagesMicroprocessor Notes Pruvanchal UniversityNika Unav100% (1)
- Chapter 2 - 2Document47 pagesChapter 2 - 2JeronimoNo ratings yet
- Microprocessor Architecture Eng. Kibwika N Bashir: Introduction To Microprocessors Chapter 2 1Document47 pagesMicroprocessor Architecture Eng. Kibwika N Bashir: Introduction To Microprocessors Chapter 2 1ElenNo ratings yet
- Microprocessor FINALDocument8 pagesMicroprocessor FINALbocemay268No ratings yet
- Microprocessor Architecture Programming and Its Application With 8085Document56 pagesMicroprocessor Architecture Programming and Its Application With 8085sanjoy banerjeeNo ratings yet
- Microprocessor ArchitectureDocument80 pagesMicroprocessor Architectureboniface ChosenNo ratings yet
- Microprocessor AllDocument84 pagesMicroprocessor Allcodingwallah0No ratings yet
- Embedded System Unit 1 (VTU)Document20 pagesEmbedded System Unit 1 (VTU)GucciNo ratings yet
- Microprocessor and ControllerDocument18 pagesMicroprocessor and ControllerSai Murali SirapuNo ratings yet
- Unit 3 Micro Controllers: Intel 8051: RV College of EngineeringDocument28 pagesUnit 3 Micro Controllers: Intel 8051: RV College of EngineeringRiya Shetty B HNo ratings yet
- Microprocessor I - Lecture 02Document45 pagesMicroprocessor I - Lecture 02Omar Mohamed Farag Abd El FattahNo ratings yet
- Introduction Microcontrollers 08Document71 pagesIntroduction Microcontrollers 08Proff Moffat JamesNo ratings yet
- 3 (Unit-1) 15997479505f5a376ec32e8Document55 pages3 (Unit-1) 15997479505f5a376ec32e8Leah DesharNo ratings yet
- 8085 Microprocessor Architecture - Copy - To PrintDocument7 pages8085 Microprocessor Architecture - Copy - To PrintJANELLA ROSE BITANGNo ratings yet
- 3 MicrocontrollersDocument28 pages3 MicrocontrollersRynefel ElopreNo ratings yet
- 8051 FullDocument69 pages8051 FullMazo Ahmed ShiponNo ratings yet
- Buses Buses Buses: Von Neumann Architecture: Von Neumann Architecture: Von Neumann ArchitectureDocument5 pagesBuses Buses Buses: Von Neumann Architecture: Von Neumann Architecture: Von Neumann ArchitectureShiuli BarmanNo ratings yet
- FALLSEM2020-21 ECE3003 ETH VL2020210101906 Reference Material II 17-Jul-2020 ARCHITECTURE OF 8085Document14 pagesFALLSEM2020-21 ECE3003 ETH VL2020210101906 Reference Material II 17-Jul-2020 ARCHITECTURE OF 8085Deepak SomiNo ratings yet
- Presentation 1Document15 pagesPresentation 1kalash satypalNo ratings yet
- Microprocessor Architecture and Memory: By: Farhan Aziz AP, Department of ECE BSACET, MathuraDocument61 pagesMicroprocessor Architecture and Memory: By: Farhan Aziz AP, Department of ECE BSACET, MathuraFarhan AzizNo ratings yet
- Chapter 2 - Embedded System ProcessorsDocument7 pagesChapter 2 - Embedded System ProcessorsStephanie CalabungNo ratings yet
- 2-Introduction To Microprocessors & Microcontrollers-12-12-2022Document16 pages2-Introduction To Microprocessors & Microcontrollers-12-12-2022BRO CUBIESNo ratings yet
- Microprossor Chapter 1Document49 pagesMicroprossor Chapter 1bayabayechaNo ratings yet
- Module - 1Document41 pagesModule - 1ManjuanthNo ratings yet
- SEC1310Document169 pagesSEC1310Su YeeNo ratings yet
- Short Answer Questions and Answers: Abhijith AugustineDocument90 pagesShort Answer Questions and Answers: Abhijith AugustineANIRUDDHA PAULNo ratings yet
- Processor Architecture 2Document67 pagesProcessor Architecture 2patolesahil9371No ratings yet
- WINSEM2022-23 BECE204L TH VL2022230500878 2022-12-13 Reference-Material-IDocument27 pagesWINSEM2022-23 BECE204L TH VL2022230500878 2022-12-13 Reference-Material-IAshwin Raj 21BEC0400No ratings yet
- New 8051 MeterialDocument113 pagesNew 8051 Meterialpraneeth saiNo ratings yet
- 57 Ma NotesDocument21 pages57 Ma NotesKajal GoudNo ratings yet
- 1.introduction To Microprocessor of 8085 - 2024Document77 pages1.introduction To Microprocessor of 8085 - 2024sanchita4586No ratings yet
- MP Manual 2Document73 pagesMP Manual 2Subir ShresthaNo ratings yet
- Mpi Unit 1Document27 pagesMpi Unit 1godhanipriyank8No ratings yet
- 1 - Microcontroller Vs MicroprocessorDocument19 pages1 - Microcontroller Vs MicroprocessorLong NguyenNo ratings yet
- Lecture 2 - Typical Embedded SystemDocument5 pagesLecture 2 - Typical Embedded SystemrhodonelduatinNo ratings yet
- MC Mod 1Document38 pagesMC Mod 1BOBAN05No ratings yet
- Module - 1: 1.1 Microprocessors V/S MicrocontrollersDocument10 pagesModule - 1: 1.1 Microprocessors V/S MicrocontrollersPushpa Latha100% (1)
- Rakesh - Saxena@gitjaipur - Com 31303122020045036pmDocument52 pagesRakesh - Saxena@gitjaipur - Com 31303122020045036pmBadrinathNo ratings yet
- 5.1 - Microcontroller and Microprocessor ArchitectureDocument35 pages5.1 - Microcontroller and Microprocessor ArchitectureWinter NaiNo ratings yet
- 2 Marks MicroprocessorDocument17 pages2 Marks MicroprocessorShreyaNo ratings yet
- 1.8051 MicrocontrollerDocument34 pages1.8051 MicrocontrollervanithaNo ratings yet
- 1 Course Material - All Chapter 04-01-2024Document148 pages1 Course Material - All Chapter 04-01-2024RU MATH GamerNo ratings yet
- Unit 1B Typical Emb SysDocument52 pagesUnit 1B Typical Emb SysNandan BallaNo ratings yet
- MPI Unit 1Document20 pagesMPI Unit 1devanshpatel0144No ratings yet
- Microcontrollers and ApplicationsDocument254 pagesMicrocontrollers and ApplicationsArivukkarasan RajaNo ratings yet
- WINSEM2023-24 BECE204L TH VL2023240505477 2024-01-05 Reference-Material-IDocument22 pagesWINSEM2023-24 BECE204L TH VL2023240505477 2024-01-05 Reference-Material-Idevanshshukla577No ratings yet
- MC Unit 1 NON CAMPUSDocument18 pagesMC Unit 1 NON CAMPUSSangamesh V AngadiNo ratings yet
- Lecture OneDocument36 pagesLecture OneMworozi DicksonNo ratings yet
- CS3691 EMBEDDED SYSTEMS AND IOTl 1 To 4 UnitDocument265 pagesCS3691 EMBEDDED SYSTEMS AND IOTl 1 To 4 Unitthamizhini senthilNo ratings yet
- مسيطرات كاملDocument101 pagesمسيطرات كاملahmed aliraqiNo ratings yet
- ACFrOgDAR Cu e5isfc2CgeNPpt5E9-5veyuZNn4IjAKG3dq78MB8ONG5U9dwpDia9pn6pMQTEGKcEbp5NtUFZjVLjXdVN OQ9GEEFhG4y9MrWgKHHpIBh TnSNS4zPz7CGk0JPJJloUzbEBIC05Document122 pagesACFrOgDAR Cu e5isfc2CgeNPpt5E9-5veyuZNn4IjAKG3dq78MB8ONG5U9dwpDia9pn6pMQTEGKcEbp5NtUFZjVLjXdVN OQ9GEEFhG4y9MrWgKHHpIBh TnSNS4zPz7CGk0JPJJloUzbEBIC05Arjun KelothuNo ratings yet
- CS3691 EMBEDDED SYSTEMS AND IOTl 1 To 4 UnitDocument254 pagesCS3691 EMBEDDED SYSTEMS AND IOTl 1 To 4 Unitarunkrishnaaiswarya108No ratings yet
- How Does A Microprocessor Work?: Then, We Will See The Terminologies Used in A MicroprocessorDocument4 pagesHow Does A Microprocessor Work?: Then, We Will See The Terminologies Used in A MicroprocessorsivaeeinfoNo ratings yet
- Microcontroller 8051Document31 pagesMicrocontroller 8051Munazza FatmaNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Electrical Maintenance ManualDocument2 pagesElectrical Maintenance Manualkurnia_te3769No ratings yet
- SymphoniePRO® Data Logger - 26 CH & 16 CHDocument7 pagesSymphoniePRO® Data Logger - 26 CH & 16 CHAni dwi OctaviaNo ratings yet
- Tlp250 Application NoteDocument7 pagesTlp250 Application NoteHeriberto Flores Ampie100% (1)
- Working SafetyDocument8 pagesWorking SafetyBat GurtNo ratings yet
- DC-Jumper Cable - 2x6 Mm2 48 V YSLYCYDocument1 pageDC-Jumper Cable - 2x6 Mm2 48 V YSLYCYChusé Antón Burillo ArbejNo ratings yet
- Luzon Grid Loepp-08312022Document5 pagesLuzon Grid Loepp-08312022KianNo ratings yet
- Protective DevicesDocument4 pagesProtective DevicesKantharaj ChinnappaNo ratings yet
- Mov-14Dxxxk Series - Metal Oxide Varistor: Features ApplicationsDocument4 pagesMov-14Dxxxk Series - Metal Oxide Varistor: Features ApplicationsFrancisco HernandezNo ratings yet
- Tle5205 2Document23 pagesTle5205 2Richard MachadoNo ratings yet
- Osram Substitube BasicDocument4 pagesOsram Substitube Basicatnkpr_vn9368No ratings yet
- St2712w LaboratoriumDocument86 pagesSt2712w LaboratoriumAnkit DesaiNo ratings yet
- TIG 200 Pulse AC/DC Mini Digital (JT-200DS)Document32 pagesTIG 200 Pulse AC/DC Mini Digital (JT-200DS)bobisaNo ratings yet
- Science Learning Center University of Michigan - Dearborn: Use of The OscilloscopeDocument49 pagesScience Learning Center University of Michigan - Dearborn: Use of The OscilloscopeAlex ZadicNo ratings yet
- VT1730 PDFDocument161 pagesVT1730 PDFCristian BobaruNo ratings yet
- Time Borrow LatchDocument4 pagesTime Borrow LatchSachin TanejaNo ratings yet
- VIBXPERT - EX - Catalog - en ManualDocument61 pagesVIBXPERT - EX - Catalog - en ManualnguyennhatbaoNo ratings yet
- Fdas Technical Specs PDFDocument10 pagesFdas Technical Specs PDFotadoyreychie31No ratings yet
- Choke Coil PanasonicDocument2 pagesChoke Coil Panasonicmautron1213No ratings yet
- Moxa Eds 208a Series DatasheetDocument5 pagesMoxa Eds 208a Series DatasheetKourosh DavallouNo ratings yet
- T320XVN02 0-AuoDocument32 pagesT320XVN02 0-Auopeterson_msc5100% (1)
- DP7645III User's ManualDocument6 pagesDP7645III User's ManualMuh Qadri TappiNo ratings yet
- Manual UPS HPH 20-30-40kVA en UsDocument66 pagesManual UPS HPH 20-30-40kVA en Usjamilsoria100% (3)
- Li PolymerDocument7 pagesLi PolymerFanny NameNo ratings yet
- Display 090920122425 Phpapp01 PDFDocument37 pagesDisplay 090920122425 Phpapp01 PDFNihar PandaNo ratings yet
- YT-2500 Smart PositionerDocument43 pagesYT-2500 Smart Positionermsalem73No ratings yet
- Service and Diagnostics 611ADocument11 pagesService and Diagnostics 611ARubens MartinsNo ratings yet
- Automation and Relay Functions - Catalogue 2003.12Document273 pagesAutomation and Relay Functions - Catalogue 2003.12Sarah RichardNo ratings yet
- Hindusthan College of Arts & Science College Fees Structure For The Academic Year 2021-2022Document7 pagesHindusthan College of Arts & Science College Fees Structure For The Academic Year 2021-2022Libin JoNo ratings yet