
压电 MEMS 器件设计与仿真-讲义1
压电 MEMS 器件设计与仿真-讲义1
You might also like
- 压电 MEMS 器件设计与仿真-讲义4Document22 pages压电 MEMS 器件设计与仿真-讲义4pengb07No ratings yet
- 12.10 铁电计算方法Document42 pages12.10 铁电计算方法刘季100% (1)
- 電子學重點Document21 pages電子學重點CharlesNo ratings yet
- 文思泉涌 如何克服学术写作拖延症(原书扫描版) (有目录) (无广告) (保罗·J·席尔瓦) (Z-Library)Document182 pages文思泉涌 如何克服学术写作拖延症(原书扫描版) (有目录) (无广告) (保罗·J·席尔瓦) (Z-Library)Lemon SharkNo ratings yet
- Eetop.cn 复旦大学模拟电路二级运放实例Document89 pagesEetop.cn 复旦大学模拟电路二级运放实例就爱吃饭团No ratings yet
- 490237 電子學實驗講義Document120 pages490237 電子學實驗講義高孝傑No ratings yet
- 電子學Document147 pages電子學陳萬城No ratings yet
- 平衡車小論文Document15 pages平衡車小論文tai daisyNo ratings yet
- 電子學 08Document24 pages電子學 08安王No ratings yet
- 压电 MEMS 器件设计与仿真-讲义5Document10 pages压电 MEMS 器件设计与仿真-讲义5pengb07No ratings yet
- 电磁学11 磁力Document56 pages电磁学11 磁力Muartz McNo ratings yet
- Notw Chapter 24.10 - 变压器及电力传输Document6 pagesNotw Chapter 24.10 - 变压器及电力传输Jayden ChanNo ratings yet
- Electrodynamics2019 00reviewDocument78 pagesElectrodynamics2019 00reviewfhliu0017No ratings yet
- 電工機械總整理Document21 pages電工機械總整理kungchineseNo ratings yet
- RLC 共振電路與微樑耦合Document6 pagesRLC 共振電路與微樑耦合謝六全No ratings yet
- 05電流Document6 pages05電流許逢仁No ratings yet
- Lecture 7 SemiconductorDocument48 pagesLecture 7 SemiconductorShou-Hua HsuNo ratings yet
- 7 电介质 103 5 课时Document102 pages7 电介质 103 5 课时liuxing041016No ratings yet
- 壓電技術應用 CH1Document31 pages壓電技術應用 CH1林宇宣No ratings yet
- 4 有导体时的静电场 70Document70 pages4 有导体时的静电场 70liuxing041016No ratings yet
- 半导体和固体物理Document21 pages半导体和固体物理Fred LeeNo ratings yet
- 實驗二 RLCDocument21 pages實驗二 RLC揚昆綻No ratings yet
- 第7章 无机材料的介电性能-改Document96 pages第7章 无机材料的介电性能-改hamossad weissNo ratings yet
- 靜電場Document25 pages靜電場周敬軒No ratings yet
- 压电 MEMS 器件设计与仿真-讲义2Document26 pages压电 MEMS 器件设计与仿真-讲义2pengb07No ratings yet
- 2 库伦定律 场 高斯定律 108Document107 pages2 库伦定律 场 高斯定律 108liuxing041016No ratings yet
- 固態物理導論Document68 pages固態物理導論林宸No ratings yet
- 11 變壓器之試驗Document14 pages11 變壓器之試驗Vic ChanNo ratings yet
- 快速解耦法潮流计算方法的比较1Document4 pages快速解耦法潮流计算方法的比较1motikinNo ratings yet
- 【课件】模拟电子技术基础(清华大学)Document800 pages【课件】模拟电子技术基础(清华大学)Leqing LiNo ratings yet
- 13 电流、电路、电压、电阻-原卷Document20 pages13 电流、电路、电压、电阻-原卷dophinlikeNo ratings yet
- 14 欧姆定律及其应用-原卷Document14 pages14 欧姆定律及其应用-原卷dophinlikeNo ratings yet
- 考虑混合强化和弹塑性损伤的有限元模型 宋振森Document4 pages考虑混合强化和弹塑性损伤的有限元模型 宋振森XipengChenNo ratings yet
- 第2章Document53 pages第2章zsliuNo ratings yet
- 大学物理的基本原理Document18 pages大学物理的基本原理kingviewNo ratings yet
- Exam22 3Document15 pagesExam22 3jinguangguo68No ratings yet
- 1Document110 pages11344896912No ratings yet
- pvqc單字Document47 pagespvqc單字wukai375No ratings yet
- 第4章 半导体二极管三极管和场效应管Document160 pages第4章 半导体二极管三极管和场效应管puyuhan5No ratings yet
- MMChap 6Document50 pagesMMChap 6shuaize wangNo ratings yet
- 高中物理电磁振荡Document31 pages高中物理电磁振荡IoryNo ratings yet
- 楞次定律自由能提取Guidelines to Bucking Coils全部翻译版本49页Document49 pages楞次定律自由能提取Guidelines to Bucking Coils全部翻译版本49页woyaoxiaxiaNo ratings yet
- 第五章電磁學Document25 pages第五章電磁學賴浩詮100% (5)
- 电机学 课件Document574 pages电机学 课件rechalsunshineNo ratings yet
- Chapter 7 Isu Edu TWDocument81 pagesChapter 7 Isu Edu TW魏廷宇No ratings yet
- 10 變壓器之連結法Document30 pages10 變壓器之連結法Vic ChanNo ratings yet
- Exam22 2Document13 pagesExam22 2jinguangguo68No ratings yet
- Study of New Type Soft Switching Capacitor Charging TechniquesDocument4 pagesStudy of New Type Soft Switching Capacitor Charging TechniquesPalmNo ratings yet
- 第1章麦克斯韦方程组1(29)Document30 pages第1章麦克斯韦方程组1(29)Xander ChenNo ratings yet
- A11 - Ch08C Atomic Spectra (Rev.)Document219 pagesA11 - Ch08C Atomic Spectra (Rev.)張湧浩No ratings yet
- 期末复习Document8 pages期末复习xinrui.zhang77No ratings yet
- 離子佈植與電漿Document204 pages離子佈植與電漿Michael Kao100% (1)
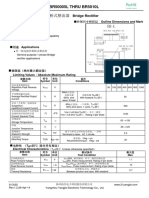
- BR50005L YangjieDocument2 pagesBR50005L YangjieChristian Torres DavilaNo ratings yet
- 全華 ch01A 傳輸線 (電路觀點)Document77 pages全華 ch01A 傳輸線 (電路觀點)Bowncat YehNo ratings yet
- 第2章 系统的动态特性Document11 pages第2章 系统的动态特性api-3828112No ratings yet
- 實驗八Document11 pages實驗八黃偉斌No ratings yet
- 一类非线性系统的概周期振动性研究及其在电力系统中应用Document5 pages一类非线性系统的概周期振动性研究及其在电力系统中应用謝六全No ratings yet
- 利用PN结测量玻尔兹曼常数实验分析 崔廷军Document4 pages利用PN结测量玻尔兹曼常数实验分析 崔廷军gnwNo ratings yet
- 压电 MEMS 器件设计与仿真-讲义3Document32 pages压电 MEMS 器件设计与仿真-讲义3pengb07No ratings yet
- 472 金屬表面電漿簡介Document14 pages472 金屬表面電漿簡介張為新No ratings yet
- 汉语关系从句的二语理解与产出 续论学习观视角Document9 pages汉语关系从句的二语理解与产出 续论学习观视角alexNo ratings yet
- KPI指标体系构建Document28 pagesKPI指标体系构建shenshiqiNo ratings yet
- 考虑高阶振型push-over分析与应用 吴奕琴Document4 pages考虑高阶振型push-over分析与应用 吴奕琴chefNo ratings yet
- 一元一次方程式_懶人包Document30 pages一元一次方程式_懶人包B14031412蔡丞軒No ratings yet
- ABAQUS混凝土损伤塑性模型参数验证 张劲Document4 pagesABAQUS混凝土损伤塑性模型参数验证 张劲night llNo ratings yet
- 动态硫化工艺对丁基橡胶 聚丙烯热塑性硫化胶性能的影响Document5 pages动态硫化工艺对丁基橡胶 聚丙烯热塑性硫化胶性能的影响Shiau Feng WuNo ratings yet
































































Download as pdf or txt
You might also like
- 压电 MEMS 器件设计与仿真-讲义4Document22 pages压电 MEMS 器件设计与仿真-讲义4pengb07No ratings yet
- 12.10 铁电计算方法Document42 pages12.10 铁电计算方法刘季100% (1)
- 電子學重點Document21 pages電子學重點CharlesNo ratings yet
- 文思泉涌 如何克服学术写作拖延症(原书扫描版) (有目录) (无广告) (保罗·J·席尔瓦) (Z-Library)Document182 pages文思泉涌 如何克服学术写作拖延症(原书扫描版) (有目录) (无广告) (保罗·J·席尔瓦) (Z-Library)Lemon SharkNo ratings yet
- Eetop.cn 复旦大学模拟电路二级运放实例Document89 pagesEetop.cn 复旦大学模拟电路二级运放实例就爱吃饭团No ratings yet
- 490237 電子學實驗講義Document120 pages490237 電子學實驗講義高孝傑No ratings yet
- 電子學Document147 pages電子學陳萬城No ratings yet
- 平衡車小論文Document15 pages平衡車小論文tai daisyNo ratings yet
- 電子學 08Document24 pages電子學 08安王No ratings yet
- 压电 MEMS 器件设计与仿真-讲义5Document10 pages压电 MEMS 器件设计与仿真-讲义5pengb07No ratings yet
- 电磁学11 磁力Document56 pages电磁学11 磁力Muartz McNo ratings yet
- Notw Chapter 24.10 - 变压器及电力传输Document6 pagesNotw Chapter 24.10 - 变压器及电力传输Jayden ChanNo ratings yet
- Electrodynamics2019 00reviewDocument78 pagesElectrodynamics2019 00reviewfhliu0017No ratings yet
- 電工機械總整理Document21 pages電工機械總整理kungchineseNo ratings yet
- RLC 共振電路與微樑耦合Document6 pagesRLC 共振電路與微樑耦合謝六全No ratings yet
- 05電流Document6 pages05電流許逢仁No ratings yet
- Lecture 7 SemiconductorDocument48 pagesLecture 7 SemiconductorShou-Hua HsuNo ratings yet
- 7 电介质 103 5 课时Document102 pages7 电介质 103 5 课时liuxing041016No ratings yet
- 壓電技術應用 CH1Document31 pages壓電技術應用 CH1林宇宣No ratings yet
- 4 有导体时的静电场 70Document70 pages4 有导体时的静电场 70liuxing041016No ratings yet
- 半导体和固体物理Document21 pages半导体和固体物理Fred LeeNo ratings yet
- 實驗二 RLCDocument21 pages實驗二 RLC揚昆綻No ratings yet
- 第7章 无机材料的介电性能-改Document96 pages第7章 无机材料的介电性能-改hamossad weissNo ratings yet
- 靜電場Document25 pages靜電場周敬軒No ratings yet
- 压电 MEMS 器件设计与仿真-讲义2Document26 pages压电 MEMS 器件设计与仿真-讲义2pengb07No ratings yet
- 2 库伦定律 场 高斯定律 108Document107 pages2 库伦定律 场 高斯定律 108liuxing041016No ratings yet
- 固態物理導論Document68 pages固態物理導論林宸No ratings yet
- 11 變壓器之試驗Document14 pages11 變壓器之試驗Vic ChanNo ratings yet
- 快速解耦法潮流计算方法的比较1Document4 pages快速解耦法潮流计算方法的比较1motikinNo ratings yet
- 【课件】模拟电子技术基础(清华大学)Document800 pages【课件】模拟电子技术基础(清华大学)Leqing LiNo ratings yet
- 13 电流、电路、电压、电阻-原卷Document20 pages13 电流、电路、电压、电阻-原卷dophinlikeNo ratings yet
- 14 欧姆定律及其应用-原卷Document14 pages14 欧姆定律及其应用-原卷dophinlikeNo ratings yet
- 考虑混合强化和弹塑性损伤的有限元模型 宋振森Document4 pages考虑混合强化和弹塑性损伤的有限元模型 宋振森XipengChenNo ratings yet
- 第2章Document53 pages第2章zsliuNo ratings yet
- 大学物理的基本原理Document18 pages大学物理的基本原理kingviewNo ratings yet
- Exam22 3Document15 pagesExam22 3jinguangguo68No ratings yet
- 1Document110 pages11344896912No ratings yet
- pvqc單字Document47 pagespvqc單字wukai375No ratings yet
- 第4章 半导体二极管三极管和场效应管Document160 pages第4章 半导体二极管三极管和场效应管puyuhan5No ratings yet
- MMChap 6Document50 pagesMMChap 6shuaize wangNo ratings yet
- 高中物理电磁振荡Document31 pages高中物理电磁振荡IoryNo ratings yet
- 楞次定律自由能提取Guidelines to Bucking Coils全部翻译版本49页Document49 pages楞次定律自由能提取Guidelines to Bucking Coils全部翻译版本49页woyaoxiaxiaNo ratings yet
- 第五章電磁學Document25 pages第五章電磁學賴浩詮100% (5)
- 电机学 课件Document574 pages电机学 课件rechalsunshineNo ratings yet
- Chapter 7 Isu Edu TWDocument81 pagesChapter 7 Isu Edu TW魏廷宇No ratings yet
- 10 變壓器之連結法Document30 pages10 變壓器之連結法Vic ChanNo ratings yet
- Exam22 2Document13 pagesExam22 2jinguangguo68No ratings yet
- Study of New Type Soft Switching Capacitor Charging TechniquesDocument4 pagesStudy of New Type Soft Switching Capacitor Charging TechniquesPalmNo ratings yet
- 第1章麦克斯韦方程组1(29)Document30 pages第1章麦克斯韦方程组1(29)Xander ChenNo ratings yet
- A11 - Ch08C Atomic Spectra (Rev.)Document219 pagesA11 - Ch08C Atomic Spectra (Rev.)張湧浩No ratings yet
- 期末复习Document8 pages期末复习xinrui.zhang77No ratings yet
- 離子佈植與電漿Document204 pages離子佈植與電漿Michael Kao100% (1)
- BR50005L YangjieDocument2 pagesBR50005L YangjieChristian Torres DavilaNo ratings yet
- 全華 ch01A 傳輸線 (電路觀點)Document77 pages全華 ch01A 傳輸線 (電路觀點)Bowncat YehNo ratings yet
- 第2章 系统的动态特性Document11 pages第2章 系统的动态特性api-3828112No ratings yet
- 實驗八Document11 pages實驗八黃偉斌No ratings yet
- 一类非线性系统的概周期振动性研究及其在电力系统中应用Document5 pages一类非线性系统的概周期振动性研究及其在电力系统中应用謝六全No ratings yet
- 利用PN结测量玻尔兹曼常数实验分析 崔廷军Document4 pages利用PN结测量玻尔兹曼常数实验分析 崔廷军gnwNo ratings yet
- 压电 MEMS 器件设计与仿真-讲义3Document32 pages压电 MEMS 器件设计与仿真-讲义3pengb07No ratings yet
- 472 金屬表面電漿簡介Document14 pages472 金屬表面電漿簡介張為新No ratings yet
- 汉语关系从句的二语理解与产出 续论学习观视角Document9 pages汉语关系从句的二语理解与产出 续论学习观视角alexNo ratings yet
- KPI指标体系构建Document28 pagesKPI指标体系构建shenshiqiNo ratings yet
- 考虑高阶振型push-over分析与应用 吴奕琴Document4 pages考虑高阶振型push-over分析与应用 吴奕琴chefNo ratings yet
- 一元一次方程式_懶人包Document30 pages一元一次方程式_懶人包B14031412蔡丞軒No ratings yet
- ABAQUS混凝土损伤塑性模型参数验证 张劲Document4 pagesABAQUS混凝土损伤塑性模型参数验证 张劲night llNo ratings yet
- 动态硫化工艺对丁基橡胶 聚丙烯热塑性硫化胶性能的影响Document5 pages动态硫化工艺对丁基橡胶 聚丙烯热塑性硫化胶性能的影响Shiau Feng WuNo ratings yet