Download as pdf or txt
You might also like
- Priscilla Cullen Eds4401 Gtpa 2019-2-1Document61 pagesPriscilla Cullen Eds4401 Gtpa 2019-2-1Icilio MannNo ratings yet
- ED 209 - Assessment in Learning 2 Part I. Multiple ChoiceDocument4 pagesED 209 - Assessment in Learning 2 Part I. Multiple ChoiceLouise Ann Bersamin82% (22)
- Applied Materials CaseDocument2 pagesApplied Materials CaseVasanth SubramanyamNo ratings yet
- CONSULTANT Interview QuestionsDocument6 pagesCONSULTANT Interview QuestionsElbakouri YoussefNo ratings yet
- CG Theory AssignmentDocument22 pagesCG Theory AssignmentpinkyNo ratings yet
- Additional Exercises For Vectors, Matrices, and Least SquaresDocument41 pagesAdditional Exercises For Vectors, Matrices, and Least SquaresAlejandro Patiño RiveraNo ratings yet
- TAMU 06 Statistical Quality ControlDocument39 pagesTAMU 06 Statistical Quality ControlVicky MalhotraNo ratings yet
- Transactional AnalysisDocument22 pagesTransactional AnalysisVasant Pawar100% (1)
- Annotated 3Document5 pagesAnnotated 3Mea AeNo ratings yet
- Computer Graphics: Output PrimitivesDocument80 pagesComputer Graphics: Output PrimitivesZamtea ChongthuNo ratings yet
- Bosch: Quality AssuranceDocument6 pagesBosch: Quality AssuranceenglopesNo ratings yet
- Unit 2 Output PrimitivesDocument80 pagesUnit 2 Output PrimitivesNitin BirariNo ratings yet
- Graphics DisplayDocument59 pagesGraphics DisplayS RAJESHNo ratings yet
- Unit 2 - Computer Graphics & Multimedia - WWW - Rgpvnotes.inDocument17 pagesUnit 2 - Computer Graphics & Multimedia - WWW - Rgpvnotes.insai projectNo ratings yet
- Trellis Based Decoding of Linear Block CodesDocument17 pagesTrellis Based Decoding of Linear Block CodesAleksandar MinjaNo ratings yet
- CSE-405 Computer Graphics Homework No: 1 Submitted By: Shubham VermaDocument11 pagesCSE-405 Computer Graphics Homework No: 1 Submitted By: Shubham VermaShubham VermaNo ratings yet
- Lecture 2 MathDocument34 pagesLecture 2 Mathnikola001No ratings yet
- ECET422a - Lecture 2 Part 2 - Quantization and EncodingDocument23 pagesECET422a - Lecture 2 Part 2 - Quantization and EncodingJoe MilsapNo ratings yet
- Sesi 6 Statistical Quality ControlDocument46 pagesSesi 6 Statistical Quality ControlMerina Merina100% (1)
- Building An Orthonormal Basis, RevisitedDocument8 pagesBuilding An Orthonormal Basis, RevisitedalgohrythmNo ratings yet
- The Mvtnorm Package: R Topics DocumentedDocument12 pagesThe Mvtnorm Package: R Topics DocumentedDavid HumphreyNo ratings yet
- Computer Graphics Question BankDocument9 pagesComputer Graphics Question BankRahul KumarNo ratings yet
- UNIT3Document10 pagesUNIT3Tajammul Hussain MistryNo ratings yet
- Image Compression Using The Discrete Cosine Transform: Andrew B. Watson, NASA Ames Research CenterDocument8 pagesImage Compression Using The Discrete Cosine Transform: Andrew B. Watson, NASA Ames Research Centerom007No ratings yet
- Random Number GenerationDocument43 pagesRandom Number GenerationAnsh GanatraNo ratings yet
- Cs411 TutorialDocument6 pagesCs411 Tutorialchiedzad madondoNo ratings yet
- White Paper: Camera View MatrixDocument7 pagesWhite Paper: Camera View MatrixCakeNo ratings yet
- Monte Carlo Methods PDFDocument6 pagesMonte Carlo Methods PDFbhuniakanishkaNo ratings yet
- Sign Bit DetectorDocument11 pagesSign Bit DetectorkaranNo ratings yet
- Line Drawing AlgorithmsDocument53 pagesLine Drawing AlgorithmsSasi Tharan100% (2)
- CGMT PPT Unit-2Document135 pagesCGMT PPT Unit-2Akshat GiriNo ratings yet
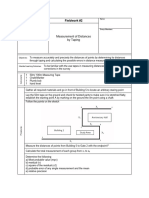
- Surveying Fieldwork 2 Measurement of Distances 1Document4 pagesSurveying Fieldwork 2 Measurement of Distances 1john.tabinasNo ratings yet
- Kuliah - FEATURE SELECTION - Maret2015Document31 pagesKuliah - FEATURE SELECTION - Maret2015iv jumat klompokNo ratings yet
- Fundamentals of Digital Signal ProcessingDocument24 pagesFundamentals of Digital Signal ProcessingTu Minh HienNo ratings yet
- Package Mvtnorm': R Topics DocumentedDocument17 pagesPackage Mvtnorm': R Topics DocumentedMuhammad Gabdika BayubuanaNo ratings yet
- DIC Predictive Coding 07Document21 pagesDIC Predictive Coding 07Tien Tan NgoNo ratings yet
- Chapter 2Document53 pagesChapter 2Abrham EnjireNo ratings yet
- Convolutional Neural NetworksDocument31 pagesConvolutional Neural NetworksAamir ayub100% (1)
- 08 Biometrics Lecture 8 Part3 2009-11-09Document24 pages08 Biometrics Lecture 8 Part3 2009-11-09bsgindia82No ratings yet
- Formatos Graficos Por VariablesDocument10 pagesFormatos Graficos Por VariablesMartín RamirezNo ratings yet
- Tutorial 1 Report: Digital Signal Processing LabDocument13 pagesTutorial 1 Report: Digital Signal Processing LabTuấnMinhNguyễnNo ratings yet
- Vmls - 103exercisesDocument50 pagesVmls - 103exercisessalnasuNo ratings yet
- CMA-ES With MATLAB CodeDocument30 pagesCMA-ES With MATLAB CodeReveloApraezCesarNo ratings yet
- 4-PCA and SVDDocument32 pages4-PCA and SVDHiteshNo ratings yet
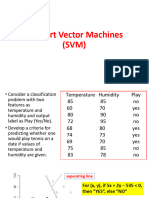
- ML Support Vector Machines 2Document22 pagesML Support Vector Machines 223mb0072No ratings yet
- 12.540 Principles of Global Positioning Systems: Mit OpencoursewareDocument23 pages12.540 Principles of Global Positioning Systems: Mit Opencoursewaresparsh100% (2)
- ADC Part B ProgramsDocument12 pagesADC Part B ProgramsSahana ShaviNo ratings yet
- Dimensionality Reduction: Jayanta Mukhopadhyay Dept. of Computer Science and EnggDocument41 pagesDimensionality Reduction: Jayanta Mukhopadhyay Dept. of Computer Science and EnggUtkarsh PatelNo ratings yet
- Differentiable Quantization of Deep Neural Networks: Equal ContributionDocument21 pagesDifferentiable Quantization of Deep Neural Networks: Equal ContributionganeshNo ratings yet
- Process Modeling Lecture 6Document51 pagesProcess Modeling Lecture 6Muddys007No ratings yet
- Unit - 1: Father of Computer GraphicsDocument118 pagesUnit - 1: Father of Computer GraphicsPrasanna AravindanNo ratings yet
- CIR Modeling of Interest Rates: Degree ProjectDocument29 pagesCIR Modeling of Interest Rates: Degree ProjectLý Nguyễn Kỳ DuyênNo ratings yet
- Exam 01 22Document20 pagesExam 01 22Haia Al SharifNo ratings yet
- Lecture 03Document15 pagesLecture 03Harsh DewanganNo ratings yet
- Inverse of A Matrix Using Minors, Cofactors and AdjugateDocument1 pageInverse of A Matrix Using Minors, Cofactors and AdjugateNeha Pathak ZaveriNo ratings yet
- Digital Signal Processing Laboratory: Experiment No.3Document15 pagesDigital Signal Processing Laboratory: Experiment No.3Mark Anthony RazonNo ratings yet
- Unit II CGDocument10 pagesUnit II CGpratheepku32No ratings yet
- PHD Econ, Applied Econometrics 2021/22 - Takehome University of InnsbruckDocument20 pagesPHD Econ, Applied Econometrics 2021/22 - Takehome University of InnsbruckKarim BekhtiarNo ratings yet
- MATLAB Grader Que.2Document4 pagesMATLAB Grader Que.2Saurabh SinghNo ratings yet
- 1 Introduction 2009 PetrelDocument35 pages1 Introduction 2009 PetreltadeitosNo ratings yet
- NumProg2 - 2020-07-12Document110 pagesNumProg2 - 2020-07-12lojoj3No ratings yet
- Data Sampling Techniques For Fourier Analysis: Session 3226Document7 pagesData Sampling Techniques For Fourier Analysis: Session 3226Farhan AliNo ratings yet
- Curs 2 Compressive SensingDocument17 pagesCurs 2 Compressive SensingMadalina-Valentina TaftaNo ratings yet
- Line Drawing Algorithm: Mastering Techniques for Precision Image RenderingFrom EverandLine Drawing Algorithm: Mastering Techniques for Precision Image RenderingNo ratings yet
- Hidden Line Removal: Unveiling the Invisible: Secrets of Computer VisionFrom EverandHidden Line Removal: Unveiling the Invisible: Secrets of Computer VisionNo ratings yet
- Business Management and Behavioural Studies: Certificate in Accounting and Finance Stage ExaminationDocument3 pagesBusiness Management and Behavioural Studies: Certificate in Accounting and Finance Stage ExaminationSYED ANEES ALINo ratings yet
- Madu Gong TssDocument22 pagesMadu Gong Tsscaseylyn taladroNo ratings yet
- A Questionnaire For Students Attitudes Towards Ict Use in Teaching and Learning BiologyDocument3 pagesA Questionnaire For Students Attitudes Towards Ict Use in Teaching and Learning Biologysololex100% (4)
- Internal Word and Mouth Recuitment MethodDocument2 pagesInternal Word and Mouth Recuitment MethodAamer Hussain100% (4)
- EthicsDocument2 pagesEthicsJennyviev Dela Cruz Balones100% (2)
- Educ 504 Calla Lesson Plan 2Document3 pagesEduc 504 Calla Lesson Plan 2api-241058437No ratings yet
- Australian Curriculum: Science (Year 3) : Sub-Strands Content Descriptions Achievement StandardDocument2 pagesAustralian Curriculum: Science (Year 3) : Sub-Strands Content Descriptions Achievement Standardapi-408787954No ratings yet
- Burwitz Teaching ResumeDocument2 pagesBurwitz Teaching Resumeapi-300437677No ratings yet
- Report On Attendance Number of School DaysDocument2 pagesReport On Attendance Number of School DaysElbert NatalNo ratings yet
- Maths Test Class 3Document4 pagesMaths Test Class 3vishakha.waingankarNo ratings yet
- PBL Lesson Plan: Global Citizenship and YouDocument8 pagesPBL Lesson Plan: Global Citizenship and Youapi-488388012No ratings yet
- Useful Wittgenstein NotesDocument7 pagesUseful Wittgenstein NoteswaffleNo ratings yet
- Parenting PatternDocument4 pagesParenting PatternseiseilalaNo ratings yet
- Math Lesson Sac ChartDocument2 pagesMath Lesson Sac Chartapi-601201816No ratings yet
- Unit 1: Curriculum Essentials: Intended Learning OutcomesDocument8 pagesUnit 1: Curriculum Essentials: Intended Learning Outcomesjestony matilla100% (1)
- Faculty of Languange and Education: HBEC3203Document9 pagesFaculty of Languange and Education: HBEC3203Mardhiah KassimNo ratings yet
- PerDev Q2 Mod3 Different Inviduals and Their Roles in Society v5Document23 pagesPerDev Q2 Mod3 Different Inviduals and Their Roles in Society v5Uriah ShianneNo ratings yet
- Connectionist Psycholinguistics: Capturing The Empirical DataDocument7 pagesConnectionist Psycholinguistics: Capturing The Empirical DataAlton Melvar Madrid DapanasNo ratings yet
- Employees' Perception of Performance Appraisal SystemDocument16 pagesEmployees' Perception of Performance Appraisal Systemtamaha25100% (1)
- Principles of Management MCQS With Answers of Stephen PDocument19 pagesPrinciples of Management MCQS With Answers of Stephen PAfreen ReignNo ratings yet
- Activity Sheet 1.1-Q2Document2 pagesActivity Sheet 1.1-Q2Jessy EbitNo ratings yet
- 3i's Module 1 & 2.Pptx FornacisDocument83 pages3i's Module 1 & 2.Pptx FornacisRichel Joy NavarreteNo ratings yet
- Thesis Systematic Literature ReviewDocument8 pagesThesis Systematic Literature Reviewamhtnuwff100% (2)
- GRADES 1 To 12 Daily Lesson LogDocument3 pagesGRADES 1 To 12 Daily Lesson LogWenjun50% (2)
- Ders-Sf Measure and ScoringDocument2 pagesDers-Sf Measure and ScoringJose De Jesus Araujo García100% (1)