Download as pdf or txt
You might also like
- PLC Questions and AnswersDocument13 pagesPLC Questions and AnswersInstrumentation ToolsNo ratings yet
- 86-EIGHTY-SIX, Vol. 11 - Dies PassionisDocument240 pages86-EIGHTY-SIX, Vol. 11 - Dies Passionislee CabiNo ratings yet
- Transfer Function On RLC CircuitsDocument38 pagesTransfer Function On RLC CircuitsMarasigan Ryan50% (2)
- Water Hammer Effect - Caesar II Case StudyDocument35 pagesWater Hammer Effect - Caesar II Case Studyghkashyap1100% (1)
- Control TheoryDocument3 pagesControl TheoryInstrumentation ToolsNo ratings yet
- PLC Ladder Logic Example ProgramDocument4 pagesPLC Ladder Logic Example ProgramInstrumentation ToolsNo ratings yet
- PLC Math InstructionsDocument4 pagesPLC Math InstructionsInstrumentation ToolsNo ratings yet
- Level Gauge Interface ProblemsDocument5 pagesLevel Gauge Interface ProblemsInstrumentation ToolsNo ratings yet
- Instrumentation Technicians-Enginneers Interview Questions-1Document87 pagesInstrumentation Technicians-Enginneers Interview Questions-1tusmanstoreNo ratings yet
- PLC Counter InstructionsDocument7 pagesPLC Counter InstructionsInstrumentation ToolsNo ratings yet
- Programmable Logic Controller ExampleDocument3 pagesProgrammable Logic Controller ExampleInstrumentation ToolsNo ratings yet
- Me 132 DSFDocument9 pagesMe 132 DSFCramzerNo ratings yet
- Liquid Level Switch Control LogicDocument3 pagesLiquid Level Switch Control LogicInstrumentation ToolsNo ratings yet
- RC Timers and Timing CircuitsDocument9 pagesRC Timers and Timing CircuitsManuj GuptaNo ratings yet
- PC Lessons On Process ControlDocument156 pagesPC Lessons On Process ControlNsidibe Michael EtimNo ratings yet
- PClesson 01 IntroDocument4 pagesPClesson 01 IntroBhabanirajasNo ratings yet
- Ion & Control Eng'gDocument106 pagesIon & Control Eng'gMark de GuzmanNo ratings yet
- Understanding Asymmetry: Vol. NO. July/AugustDocument7 pagesUnderstanding Asymmetry: Vol. NO. July/AugustMACARIO CRUZNo ratings yet
- LC Tuned CircuitDocument2 pagesLC Tuned CircuitInstrumentation ToolsNo ratings yet
- The RC Circuit: TheoryDocument4 pagesThe RC Circuit: TheoryCanh LuongtienNo ratings yet
- PLC Programming ExamplesDocument3 pagesPLC Programming ExamplesInstrumentation ToolsNo ratings yet
- © Career Avenues A1Document160 pages© Career Avenues A1Nomee PatelNo ratings yet
- SP Lab Exp1Document4 pagesSP Lab Exp1himanshuNo ratings yet
- Control System Limit Controls - Low / HighDocument6 pagesControl System Limit Controls - Low / HighInstrumentation ToolsNo ratings yet
- HV Divider - PaperDocument5 pagesHV Divider - Paperrasool waniNo ratings yet
- David Stoops 2Document15 pagesDavid Stoops 2Eng Jye NgNo ratings yet
- Simple PLC ProgramDocument5 pagesSimple PLC ProgramInstrumentation ToolsNo ratings yet
- Lab 5 - Time Constant of RC CircuitsDocument4 pagesLab 5 - Time Constant of RC CircuitshamzaNo ratings yet
- PID ControllerDocument8 pagesPID ControllerInstrumentation ToolsNo ratings yet
- Q & A of InstrumentsDocument86 pagesQ & A of InstrumentsAbdelrahman Mohamed Elshafei100% (1)
- PLC Ladder Logic Example of AlarmsDocument8 pagesPLC Ladder Logic Example of AlarmsInstrumentation ToolsNo ratings yet
- PLC Program For ValveDocument5 pagesPLC Program For ValveInstrumentation ToolsNo ratings yet
- Lab 9: Natural Response of An RC Circuit: Muhammad Ahmed Minhas FA20-BEE-2C-112Document3 pagesLab 9: Natural Response of An RC Circuit: Muhammad Ahmed Minhas FA20-BEE-2C-112Souban JavedNo ratings yet
- Remote Seals Level CalculationDocument5 pagesRemote Seals Level CalculationInstrumentation ToolsNo ratings yet
- Physics 208 RC Circuit Lab: V V (1 - E) V V (1 - E)Document4 pagesPhysics 208 RC Circuit Lab: V V (1 - E) V V (1 - E)kriiiiiNo ratings yet
- Numerical Simulation of An Oscillating Cylinder in A Cross - Ow at Low Reynolds Number: Forced and Free OscillationsDocument21 pagesNumerical Simulation of An Oscillating Cylinder in A Cross - Ow at Low Reynolds Number: Forced and Free OscillationsManu K VasudevanNo ratings yet
- Modeling Reference - Valves of Various Types (TN) - Hydraulics and Hydrology Wiki - Hydraulics and Hydrology - Be Communities by BentleyDocument6 pagesModeling Reference - Valves of Various Types (TN) - Hydraulics and Hydrology Wiki - Hydraulics and Hydrology - Be Communities by Bentleypca97No ratings yet
- Asignment CSDDocument16 pagesAsignment CSDAditya BirlaNo ratings yet
- On Off Level Control ProcessDocument16 pagesOn Off Level Control ProcessAndrew NabilNo ratings yet
- PLC Data Comparison InstructionsDocument4 pagesPLC Data Comparison InstructionsInstrumentation ToolsNo ratings yet
- B. Franken G. Anderson 1990 Analysis of HVDV Converters Connected To Weak Ac SystemsDocument8 pagesB. Franken G. Anderson 1990 Analysis of HVDV Converters Connected To Weak Ac SystemsFelix GamarraNo ratings yet
- Idea Prese NtationDocument7 pagesIdea Prese NtationdrbstesbtabtbatNo ratings yet
- Optimum Settings For Automatic Controllers: American Society of Mechanical EngineersDocument9 pagesOptimum Settings For Automatic Controllers: American Society of Mechanical EngineersAlexandre Acacio AndradeNo ratings yet
- Surge Phenomena Analytically Predicted in A Multi-Stage Axial Flow Compressor System in The Reduced-Speed ZoneDocument15 pagesSurge Phenomena Analytically Predicted in A Multi-Stage Axial Flow Compressor System in The Reduced-Speed Zonerajtharun48No ratings yet
- ME1100 01 Fundamentals PDFDocument7 pagesME1100 01 Fundamentals PDFYokesh P S ae22b065No ratings yet
- Discrete Process MeasurementDocument14 pagesDiscrete Process Measurementtt_aljobory3911No ratings yet
- ACS Experiments 3,4Document5 pagesACS Experiments 3,4Aditya SharmaNo ratings yet
- Fluid Flow Processes: ScienceDocument8 pagesFluid Flow Processes: Science4501-Abdullah MasoodNo ratings yet
- RLC Circuits Tutorial - Transient AnalysisDocument4 pagesRLC Circuits Tutorial - Transient AnalysisKev107No ratings yet
- Pulse-Width Modulated D.c.-D.c. ConvertersDocument26 pagesPulse-Width Modulated D.c.-D.c. ConvertersDeepak NayakNo ratings yet
- Presentation For ControllerDocument42 pagesPresentation For ControllerAlakshendra JohariNo ratings yet
- Analysis of Oscillograms (v6.0)Document21 pagesAnalysis of Oscillograms (v6.0)luhusapaNo ratings yet
- Relationship Between Bandwidth and Rise TimeDocument14 pagesRelationship Between Bandwidth and Rise TimeVikas MehtaNo ratings yet
- Micro-Cap ManualDocument50 pagesMicro-Cap ManuallunikmirNo ratings yet
- Chapter 1 Introduction Control SysDocument52 pagesChapter 1 Introduction Control SysHaliza MatsaniNo ratings yet
- Muhammad Sohaib Ali Fa20-Bee-2C-241Document3 pagesMuhammad Sohaib Ali Fa20-Bee-2C-241Souban JavedNo ratings yet
- Level TrollDocument8 pagesLevel TrollInstrumentation ToolsNo ratings yet
- Lung ModelDocument6 pagesLung ModelGülşah Öztürk KadıhasanoğluNo ratings yet
- A Differential Sample and Hold Technique That Rejects Offset VoltDocument54 pagesA Differential Sample and Hold Technique That Rejects Offset Voltzoom09529No ratings yet
- Control Chapter 5 - RemoteDocument87 pagesControl Chapter 5 - RemoteJhonny PerezNo ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- PLC Ladder Logic Example ProgramDocument4 pagesPLC Ladder Logic Example ProgramInstrumentation ToolsNo ratings yet
- PLC AnalogDocument3 pagesPLC AnalogInstrumentation ToolsNo ratings yet
- PLC OutputsDocument12 pagesPLC OutputsInstrumentation ToolsNo ratings yet
- PLC Data Comparison InstructionsDocument4 pagesPLC Data Comparison InstructionsInstrumentation ToolsNo ratings yet
- PLC Ladder Logic Example of AlarmsDocument8 pagesPLC Ladder Logic Example of AlarmsInstrumentation ToolsNo ratings yet
- PLC ConfigurationDocument3 pagesPLC ConfigurationInstrumentation ToolsNo ratings yet
- PLC IO ModulesDocument5 pagesPLC IO ModulesInstrumentation ToolsNo ratings yet
- PLC Programming For PneumaticsDocument9 pagesPLC Programming For PneumaticsInstrumentation ToolsNo ratings yet
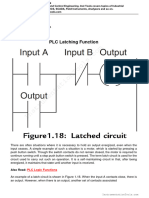
- PLC Latching FunctionDocument4 pagesPLC Latching FunctionInstrumentation ToolsNo ratings yet
- PLC Counter InstructionsDocument7 pagesPLC Counter InstructionsInstrumentation ToolsNo ratings yet
- PLC Logic Questions and AnswersDocument3 pagesPLC Logic Questions and AnswersInstrumentation ToolsNo ratings yet
- PLC Math InstructionsDocument4 pagesPLC Math InstructionsInstrumentation ToolsNo ratings yet
- Linear Approximation Non Linear SystemDocument5 pagesLinear Approximation Non Linear SystemInstrumentation ToolsNo ratings yet
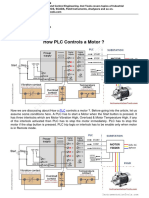
- PLC Motor ProgrammingDocument4 pagesPLC Motor ProgrammingInstrumentation ToolsNo ratings yet
- Programmable Logic Controller ExampleDocument3 pagesProgrammable Logic Controller ExampleInstrumentation ToolsNo ratings yet
- PLC LogicDocument8 pagesPLC LogicInstrumentation ToolsNo ratings yet
- Valve StandardsDocument3 pagesValve StandardsInstrumentation ToolsNo ratings yet
- PLC Motor LogicDocument5 pagesPLC Motor LogicInstrumentation ToolsNo ratings yet
- PLC WiringDocument7 pagesPLC WiringInstrumentation ToolsNo ratings yet
- Liapunovs Stability CriterionDocument4 pagesLiapunovs Stability CriterionInstrumentation ToolsNo ratings yet
- ThermowellsDocument3 pagesThermowellsInstrumentation ToolsNo ratings yet
- Level Sensor AnimationDocument2 pagesLevel Sensor AnimationInstrumentation ToolsNo ratings yet
- Simple PLC ProgramDocument5 pagesSimple PLC ProgramInstrumentation ToolsNo ratings yet
- PLC Analog Input SamplingDocument2 pagesPLC Analog Input SamplingInstrumentation ToolsNo ratings yet
- Override Control SystemDocument4 pagesOverride Control SystemInstrumentation ToolsNo ratings yet
- Liapunovs StabilityDocument2 pagesLiapunovs StabilityInstrumentation ToolsNo ratings yet
- Level Sensors TerminologyDocument6 pagesLevel Sensors TerminologyInstrumentation ToolsNo ratings yet
- Linear Ma To Square Root MaDocument1 pageLinear Ma To Square Root MaInstrumentation ToolsNo ratings yet
- Level Measurement MCQ QuestionsDocument6 pagesLevel Measurement MCQ QuestionsInstrumentation ToolsNo ratings yet
- Drvo BetonDocument131 pagesDrvo BetonSonja DragovicNo ratings yet
- Comprehensive Approach. Pp. 41-45 Philippines: A WSS Senior High School SeriesDocument3 pagesComprehensive Approach. Pp. 41-45 Philippines: A WSS Senior High School SeriesTJ gatmaitanNo ratings yet
- Thermal Transport PhenomenaDocument2 pagesThermal Transport PhenomenaAliahmad AmiriNo ratings yet
- Physics 8.03 Vibrations and WavesDocument5 pagesPhysics 8.03 Vibrations and Wavesasif khanNo ratings yet
- Dimensional Analysis and SimilitudeDocument47 pagesDimensional Analysis and SimilitudeFabrizio NEBESSENo ratings yet
- Course Outline - Electrical Machines - Feb 7Document5 pagesCourse Outline - Electrical Machines - Feb 7Ahad MunawarNo ratings yet
- Water Rocket PhysicsDocument8 pagesWater Rocket PhysicsFrancisco100% (1)
- Hooke's Law & Young's ModulusDocument26 pagesHooke's Law & Young's ModulusSonal WanigasooriyaNo ratings yet
- A450 - EN - Rev.1 Car Dashboard Polish SpecsDocument1 pageA450 - EN - Rev.1 Car Dashboard Polish SpecsWeldon KipyegonNo ratings yet
- 2-1 R16 Supple May-2024Document3 pages2-1 R16 Supple May-2024Sanjeev KumarNo ratings yet
- KDS142001 File 20180730Document49 pagesKDS142001 File 20180730최광민No ratings yet
- FB HelixMark Katalog EN 3 DSDocument7 pagesFB HelixMark Katalog EN 3 DSPuteri StevaniNo ratings yet
- Fundamentals of Plastic Product Design Question Paper 2015-16Document4 pagesFundamentals of Plastic Product Design Question Paper 2015-16Arun Prasad100% (2)
- Vib23 Module 7Document7 pagesVib23 Module 7Rouaa khaledNo ratings yet
- T T T Axyz Bxyz Cxy Dxyz: at BT CT DTDocument1 pageT T T Axyz Bxyz Cxy Dxyz: at BT CT DTNick J NickNo ratings yet
- MixturesDocument20 pagesMixturesS2 MelodyNo ratings yet
- Etiquetas BelcorpDocument1 pageEtiquetas Belcorpesteban sarmientoNo ratings yet
- 18 Control PhilosophyDocument13 pages18 Control PhilosophyWael WaelNo ratings yet
- A Review On Microwave Absorber Using Agricultural Residues: February 2019Document5 pagesA Review On Microwave Absorber Using Agricultural Residues: February 2019Hashira NarudinNo ratings yet
- Heat-1 DPP-1-12 Sol. .p65Document24 pagesHeat-1 DPP-1-12 Sol. .p65Avijeet kumar MishraNo ratings yet
- IS 15351 ManualDocument7 pagesIS 15351 ManualCHIRAG PATELNo ratings yet
- 2021 ProbDocument3 pages2021 ProbKanika ManochaNo ratings yet
- CE6501 Structural Analysis I 2 Marks Unit 2Document20 pagesCE6501 Structural Analysis I 2 Marks Unit 2g.rajaNo ratings yet
- Birth of Set TheoryDocument17 pagesBirth of Set TheoryMaturan, Ma. Kayesha Camille A.No ratings yet
- Class 10 Physics ExplorerDocument30 pagesClass 10 Physics ExplorerRajendra PatelNo ratings yet
- NotassDocument150 pagesNotassFelipe Cruz VieiraNo ratings yet
- Technotes: The Advantages of Using Wind Tunnel TestingDocument4 pagesTechnotes: The Advantages of Using Wind Tunnel TestingWasim IlyasNo ratings yet
- System Identification and Robust Position Control For Electro Hydraulic Servo System Using Hybrid Model Predictive ControlDocument15 pagesSystem Identification and Robust Position Control For Electro Hydraulic Servo System Using Hybrid Model Predictive ControlJose Luis SarmientoNo ratings yet
- Soal B InggrisDocument6 pagesSoal B Inggrishari fajarNo ratings yet