Professional Documents
Culture Documents
Week06 Ed09
Week06 Ed09
Uploaded by
shahrzad ...Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Week06 Ed09
Week06 Ed09
Uploaded by
shahrzad ...Copyright:
Available Formats
ﻫﻔﺘﮥ - 6ﺳﺎﯾﺮ ﺳﯿﺴﺘﻤﻬﺎي دﯾﻨﺎﻣﯿﮑﯽ ﺧﻄﯽ
ﻣﻘﺪﻣﻪ:
در ﮐﻨﺎر دو ﺳﯿﺴﺘﻢ ﻣﻌﺮوف درﺟﻪ اول و درﺟﻪ دوم ،ﺳﯿﺴﺘﻢﻫﺎي دﯾﮕﺮي ﻧﯿﺰ وﺟﻮد دارﻧﺪ ﮐﻪ ﻫﻢ از ﻧﻈﺮ ﻣﻔﻬﻮﻣﯽ و ﺗﺤﻠﯿﻠﯽ
ﺣﺎﺋﺰ اﻫﻤﯿﺖ ﻫﺴﺘﻨﺪ و ﻫﻢ از ﻧﻈﺮ ﻃﺮاﺣﯽ و ﺗﻌﺒﯿﺮ و ﺗﻔﺴﯿﺮ ﻋﻤﻠﮑﺮد ﮐﻨﺘﺮﻟﺮ .در اﯾﻦ ﺑﺨﺶ ﺑﻪ اﯾﻦ ﺳﯿﺴﺘﻤﻬﺎ ﻫﻤﺮاه ﺑﺎ ﻣﺜﺎلﻫﺎ و
ﻧﻤﻮﻧﻪﻫﺎي ﻓﯿﺰﯾﮑﯽ ﻣﯽﭘﺮدازﯾﻢ .ﺷﺎﯾﺎن ذﮐﺮ اﺳﺖ ﮐﻪ ﺑﺎﯾﺪ ﺑﻪ ﺳﺎﺧﺘﺎر ﺗﺎﺑﻊ اﻧﺘﻘﺎل ﻫﺮ ﮐﺪام از اﯾﻦ ﺳﯿﺴﺘﻤﻬﺎ ﺗﻮﺟﻪ وﯾﮋهاي ﻗﺎﺋﻞ
ﺷﺪ ﺗﺎ ﺗﺮﻣﯿﻨﻮﻟﻮژي و ﻗﺎﻣﻮس ﮐﻨﺘﺮل ﺧﻄﯽ ﺑﻪﻃﻮر ﯾﮑﺪﺳﺖ ﻓﻬﻢ ﺷﻮد.
ﺳﯿﺴﺘﻢﻫﺎي ﻣﺮﺗﺒﻪ ﺑﺎﻻﺗﺮ ﻫﻤﺮاه ﺑﺎ ﭼﻨﺪ ﺟﻤﻠﻪ اي ﺻﻮرت
ﻫﻤﺎنﻃﻮر ﮐﻪ در ﺑﺨﺶﻫﺎي ﻗﺒﻞ ﺑﺮاي ﺳﯿﺴﺘﻢﻫﺎي ﻣﺘﻮاﻟﯽ دﯾﺪﯾﻢ ﻣﻤﮑﻦ اﺳﺖ ﺑﺮ اﺛﺮ ﺗﻮاﻟﯽ دﯾﻨﺎﻣﯿﮑﻬﺎي ﻣﺜﻼً درﺟﻪ اول
ﺑﻪ ﺳﯿﺴﺘﻢﻫﺎي ﮐﻠﯽ ﺑﺮﺳﯿﻢ ﮐﻪ درﺟﻪ ﻣﺨﺮج ﺑﺰرﮔﺘﺮ از ) 2ﯾﺎ ﻣﺴﺎوي (2و درﺟﻪ ﺻﻮرت ﺑﺰرﮔﺘﺮ از ﺻﻔﺮ ﺑﺎﺷﺪ .ﻟﺬا از ﻧﻈﺮ رﯾﺎﺿﯽ
اﯾﻦ ﺳﯿﺴﺘﻢﻫﺎ را ﺑﻪ ﺻﻮرت ﮐﻠﯽ زﯾﺮ ﻧﻤﺎﯾﺶ ﻣﯽ دﻫﻨﺪ:
)ﻣﻨﻈﻮر از ﺻﻔﺮ و ﻗﻄﺐ رﯾﺸﻪﻫﺎي ﭼﻨﺪﺟﻤﻠﻪاي ﺻﻮرت و ﻣﺨﺮج ﺑﻪ ﺗﺮﺗﯿﺐ ﻫﺴﺘﻨﺪ(
ﻧﻤﺎﯾﺶ ﺻﻔﺮ و ﻗﻄﺐ ) (s − z 1 )(s − z 2 ) (s − z m
G (s ) = K
) (s − p1 )(s − p 2 ) (s − p n
ﻧﻤﺎﯾﺶ ﭼﻨﺪﺟﻤﻠﻪاي s m + b1s m −1 + b m
= ) G (s
s n + a1s n −1 + an
ﻧﻤﺎﯾﺶ ﻣﺘﻘﺪم – ﻣﺘﺎﺧﺮ )ﺛﻮاﺑﺖ زﻣﺎﻧﯽ( )(ξ1s + 1)(ξ 2 s + 1) (ξ m s + 1
G (s ) = K
)(τ1s + 1)(τ 2 s + 1) (τ n s + 1
ﯾﺎدآوري ﻣﯽﺷﻮد ﮐﻪ ﺑﺮاي ﺳﯿﺴﺘﻢﻫﺎي ﻃﺒﯿﻌﯽ ﻫﻤﯿﺸﻪ m ≤ nﻣﯽ ﺑﺎﺷﺪ و ﺑﻪ ﺗﻔﺎﺿﻞ n-mرﺗﺒﻪ ﻧﺴﺒﯽ ﻣﯽﮔﻮﯾﻨﺪ .ﺑﻪ
ﺑﯿﺎن دﯾﮕﺮ ،ﺑﺮاي اﯾﻨﮑﻪ »ﺳﯿﺴﺘﻢ« ﺗﺤﺖ ﻣﻄﺎﻟﻌﻪ ﯾﺎ ﻃﺮّاﺣﯽ ﯾﮏ ﺳﯿﺴﺘﻢ »ﻋِﻠّﯽ «1ﺑﺎﺷﺪ ،ﺑﺎﯾﺪ ﻣﺮﺗﺒﮥ ﺗﻐﯿﯿﺮ )ﻣﺸﺘﻖ( ورودي ﻫﻤﯿﺸﻪ
ﮐﻤﺘﺮ از ﻣﺮﺗﺒﮥ ﻣﺸﺘﻖ ﺧﺮوﺟﯽ ﺑﺎﺷﺪ .اﯾﻦ ﺑﺨﺎﻃﺮ وﺟﻮد اﯾﻨﺮﺳﯽ و ﻣﺴﺘﺤﯿﻞﺑﻮدن ﭘﯿﺶﺑﯿﻨﯽ در ﺳﯿﺴﺘﻤﻬﺎي دﯾﻨﺎﻣﯿﮑﯽ،
ﻓﯿﺰﯾﮑﻮﺷﯿﻤﯿﺎﺋﯽ و واﻗﻌﯽ اﺳﺖ .ﺣﺎل اﮔﺮ ﺑﺨﻮاﻫﯿﻢ از »ﺳﯿﺴﺘﻢ« واﻗﻌﯽ ،ﯾﮏ »ﻣﺪل« ﺧﻄﯽ داﺷﺘﻪ ﺑﺎﺷﯿﻢ ،ﺑﺎﯾﺪ در ﺣﻔﻆ ﺧﺼﻮﺻﯿﺖ
و وﯾﮋﮔﯽ »ﻋﻠّﯿﺖ« آﻧﻬﻢ ﮐﻮﺷﺎ ﺑﺎﺷﯿﻢ ﺗﺎ ﻣﺪل ﻣﺬﮐﻮر ﻧﺰدﯾﮑﺘﺮﯾﻦ ﺗﻘﺮﯾﺐ را ﺑﻪ واﻗﻌﯿﺖ داﺷﺘﻪ ﺑﺎﺷﺪ .ﺑﺪﯾﻦ ﺗﺮﺗﯿﺐ ،ﺑﺮاي ﻣﺪﻟﻬﺎي
ﺧﻄﯽِ »ﻋﻠِّﯽ« ،رﺗﺒﮥ ﻧﺴﺒﯽ ﻫﻤﻮاره ﺑﺎﯾﺪ ﺑﺰرﮔﺘﺮ از ﺻﻔﺮ ﺑﺎﺷﺪ .ﻣﺪﻟﻬﺎي داراي رﺗﺒﮥ ﻧﺴﺒﯽ ﻣﺜﺒﺖ در ﻗﺎﻣﻮس رﯾﺎﺿﯽ دﯾﻨﺎﻣﯿﮏ
ﺳﯿﺴﺘﻤﻬﺎ ،ﻣﻮﺳﻮم ﺑﻪ »اﮐﯿﺪاً ﺳَﺮه «2ﻫﺴﺘﻨﺪ .ﻣﻀﺎﻓﺎً ،ﻣﺪﻟﻬﺎي داراي رﺗﺒﮥ ﻧﺴﺒﯽ ﺻﻔﺮ ﻣﻮﺳﻮم ﺑﻪ »ﺳَﺮه «3و اﮔﺮ ﻫﻢ ﻣﻘﺪار رﺗﺒﮥ
ﻧﺴﺒﯽ ﻣﻨﻔﯽ ﺑﻮد ،ﻋﻤﻼً ﻗﺎﺑﻞ ﺗﺤﻘﻖ و واﻗﻊﻧﻤﺎﯾﯽ 4ﻧﺒﻮده و ﻣﻮﺳﻮم ﺑﻪ ﻣﺪﻟﻬﺎي »ﻧﺎﺳَﺮه «5ﻫﺴﺘﻨﺪ .ﺑﺮاي ﺑﯿﺎن اﯾﻦ ﻧﻮع ﺳﯿﺴﺘﻢﻫﺎ
– ﺟﻬﺖ ﺣﻔﻆ ﯾﮑﭙﺎرﭼﮕﯽ -از ﻫﻤﺎن اﯾﻨﺪﮐﺲﻫﺎ ﯾﺎ درﺟﻪ ﻣﺨﺮج و ﺻﻮرت اﺳﺘﻔﺎده ﻣﯽﮐﻨﻨﺪ .ﺑﻪ ﻃﻮر ﻣﺜﺎل ﺳﯿﺴﺘﻢ ﻣﺘﻘﺪم و
ﻣﺘﺎﺧﺮ ﭘﯿﺶﮔﻔﺘﻪ را ﯾﮏ ﺳﯿﺴﺘﻢ درﺟﻪ )1و (1ﻣﯽﻧﺎﻣﻨﺪ و ﺳﯿﺴﺘﻤﯽ ﮐﻪ دو ﻗﻄﺐ )دو رﯾﺸﻪ در ﻣﺨﺮج( و ﯾﮏ ﺻﻔﺮ )ﯾﮏ رﯾﺸﻪ
در ﺻﻮرت( داﺷﺘﻪ ﺑﺎﺷﺪ ،ﺳﯿﺴﺘﻢ ﯾﺎ ﺗﺎﺑﻊ اﻧﺘﻘﺎل درﺟﻪ )1و (2ﻣﯽﮔﻮﯾﻨﺪ .وﺟﻮد ﺻﻔﺮ )ﻣﺤﺪود( در ﺻﻮرت ﯾﮏ ﺗﺎﺑﻊ اﻧﺘﻘﺎل ﮔﻮﯾﺎ از
4 Realizable 1 Causal
5 Improper 2 Strictly Proper Rational - SPR
3 Proper Rational - PR
102ﮐﻨﺘﺮل ﺧﻄﯽ ﻓﺮآﯾﻨﺪﻫﺎ )(26346
ﻧﻈﺮ ﭘﺎﯾﺪاري اﻫﻤﯿﺖ ﺛﺎﻧﻮﯾﻪ داﺷﺘﻪ ،ﺣﺎل آﻧﮑﻪ در ﺑﺮﺧﯽ ﺣﺎﻻت ﺧﺎص در ﭘﺎﯾﺪاري ،ﻋﻤﻠﮑﺮد و ﭘﺎﺳﺦ ﻣﯽﺗﻮاﻧﺪ ﻧﻘﺶ ﺗﻌﯿﯿﻦﮐﻨﻨﺪهاي
داﺷﺘﻪ ﺑﺎﺷﺪ .ﺑﻪ ﻃﻮر ﻣﺜﺎل ﭘﺎﺳﺦ ﭘﻠﻪ ﯾﮏ ﺳﯿﺴﺘﻢ ﻧﻤﻮﻧﻪ درﺟﻪ )1و (2را ﺗﺤﺖ ﻣﻄﺎﻟﻌﻪ و ﺑﺮرﺳﯽ ﻗﺮار ﻣﯽ دﻫﯿﻢ )ﯾﮏ ﺻﻔﺮ
ﺣﻘﯿﻘﯽ ﻣﻨﻔﯽ و دو ﻗﻄﺐ ﺣﻘﯿﻘﯽ ﻣﻨﻔﯽ ﯾﺎ ﻫﻤﮕﯽ ﭘﺎراﻣﺘﺮﻫﺎ ﺣﻘﯿﻘﯽ ﻣﺜﺒﺖ(:
) y (s )K (ξ1s + 1
=G
) (s =
)u (s ) (τ1s + 1)(τ 2 s + 1
ﭘﺎﺳﺦ ﻻﭘﻼس اﯾﻦ ﺳﯿﺴﺘﻢ ﺑﻪ ﭘﻠﻪ واﺣﺪ ﺑﻪ ﺷﮑﻞ زﯾﺮ ﻣﯽ ﺑﺎﺷﺪ:
)K (ξ1s + 1 1 A A1 A2
=y
) (s ×
= K 0+ +
(τ1s + 1)(τ 2 s + 1) s s τ1s + 1 τ 2 s + 1
ﭘﺲ از ﻣﻌﻠﻮم ﺷﺪن ﺛﻮاﺑﺖ:
) −τ1 (τ1 − ξ1 ) −τ 2 (τ 2 − ξ1
==A 0 1
, A1 =
, A2
τ1 − τ 2 τ 2 − τ1
را در داﻣﻨﻪ زﻣﺎن ﺑﺪﺳﺖ آورد: y ﻣﯽﺗﻮان ﺗﺒﺪﯾﻞ ﻣﻌﮑﻮس ﮔﺮﻓﺘﻪ و ﭘﺎﺳﺦ
τ −ξ −t τ1 τ 2 − ξ1 −t τ 2
= ) y (t
K 1 − 1 1 e − e
τ1 − τ 2 τ 2 − τ1
ﺣﺎل اﮔﺮ ﻫﻤﯿﻦ ﭘﺎﺳﺦ را ﺑﺎ ﭘﺎﺳﺦ ﺳﯿﺴﺘﻢ درﺟﻪ ) (2ﻣﻘﺎﯾﺴﻪ ﮐﻨﯿﻢ ) (ξ1 = 0ﺑﻪ ﺧﻮﺑﯽ اﺛﺮ ﺻﻔﺮ )ﺣﻀﻮر ( ξ1را ﻣﺸﺎﻫﺪه
ﻣﯽﮐﻨﯿﻢ:
τ −t τ1 τ 2 −t τ 2
= ) y (t
K 1 − 1 e − e
τ1 − τ 2 τ 2 − τ1
دﻗﺖ ﮐﻨﯿﺪ ξ1در ﺗﺮمﻫﺎي ﻧﻤﺎﯾﯽ ﻇﺎﻫﺮ ﻧﻤﯽﺷﻮد ﺑﻠﮑﻪ ﻣﺼﺎﻟﺤﻪ و ﻣﯿﺰان رﻗﺎﺑﺖ دو ﺟﻤﻠﻪ ﻧﻤﺎﯾﯽ را ﻋﻮض ﻣﯽﮐﻨﺪ!
ﺑﺮاي ﺑﺮرﺳﯽ ﺑﯿﺸﺘﺮ ،ﻓﺮض ﮐﻨﯿﺪ τ1و τ 2ﺑﻪ ﻃﻮر ﺻﻌﻮدي ﻣﺮﺗﺐ ﺷﺪه اﻧﺪ ﯾﻌﻨﯽ ، τ 1 < τ 2آﻧﮕﺎه ﺑﺎ ﺗﻮﺟﻪ ﺑﻪ ﻣﻘﺎدﯾﺮ
ﻣﺨﺘﻠﻒ ξ1ﺗﻐﯿﯿﺮ ﻓﺮم ﭘﺎﺳﺦ را ﺗﺤﻠﯿﻞ ﻣﯽ ﮐﻨﯿﻢ:
ﺣﺎﻟﺖ اول ، ξ1 > τ 2 :دراﯾﻦ ﺣﺎﻟﺖ ﻣﯽﺗﻮان ﺛﺎﺑﺖ ﮐﺮد ﮐﻪ در ﻟﺤﻈﺎﺗﯽ ﭘﺎﺳﺦ از ﻣﻘﺪار ﻧﻬﺎﯾﯽ Kﺑﯿﺸﺘﺮ ﻣﯽﺷﻮد ،ﯾﻌﻨﯽ
ﭘﺎﺳﺦ ﺷﺎﻣﻞ اورﺷﻮت اﺳﺖ وﻟﯽ آﻧﺪرﺷﻮت ﻧﺪارد! اﯾﻦ ﺑﺪان ﻣﻌﻨﯽ اﺳﺖ ﮐﻪ اوج ﮔﺮﻓﺘﻦ و ﺑﯿﺸﺘﺮ ﺷﺪن ﻣﻘﺪار ﻟﺤﻈﻪاي ) y (t
از ﻣﻘﺪار ﻧﻬﺎﯾﯽ آن اﻟﺰاﻣﺎ ﺑﻪ ﺧﺎﻃﺮ وﺟﻮد رﯾﺸﻪ ﻫﺎي ﮐﻤﭙﻠﮑﺲ در ﻣﺨﺮج ﺗﺎﺑﻊ اﻧﺘﻘﺎل ﻧﯿﺴﺖ!
ﺣﺎﻟﺖ دوم ξ1 = τ 2 :ﯾﺎ ، ξ1 = τ1در اﯾﻦ ﺣﺎﻟﺖ ﺻﻔﺮ ﺻﻮرت ﺑﺎ ﺻﻔﺮ ﻣﺨﺮج )ﯾﺎ ﻫﻤﺎن ﻗﻄﺐ( ﺣﺬف ﺷﺪه و ﺳﯿﺴﺘﻢ درﺟﻪ
)1و (2ﺑﻪ ﯾﮏ ﺳﯿﺴﺘﻢ درﺟﻪ ) (1ﺗﺒﺪﯾﻞ ﻣﯽ ﺷﻮد .ﭘﺲ ﭘﺎﺳﺦ ﺑﻪ ﺻﻮرت ﻧﻬﺎﯾﯽ ﺑﺎ ﺛﺎﺑﺖ زﻣﺎﻧﯽ τ 1ﯾﺎ τ 2ﻇﺎﻫﺮ ﻣﯽ ﺷﻮد .ﮔﻔﺘﻨﯽ
اﺳﺖ درﺑﺎره »ﺣﺬف ﻧﺎﭘﺎﯾﺪار« ﺑﻌﺪ از ﻃﺮح دﻗﯿﻘﺘﺮ ﻣﻔﻬﻮم ﭘﺎﯾﺪاري ﺑﺤﺚ ﺧﻮاﻫﯿﻢ ﮐﺮد.
در اﯾﻦ ﺣﺎﻟﺖ ﺳﯿﺴﺘﻢ اورﺷﻮت ﻧﺸﺎن ﻧﻤﯽدﻫﺪ و ﺗﻘﺮﯾﺒﺎ رﻓﺘﺎري ﺷﺒﯿﻪ رﻓﺘﺎر ﺳﯿﺴﺘﻢ درﺟﻪ اول ﺣﺎﻟﺖ ﺳﻮم0 < ξ1 < τ 2 :
دارد )ﭼﻮن ﺗﺎﺑﻊ اﻧﺘﻘﺎل داراي رﺗﺒﻪ ﻧﺴﺒﯽ 1ﻣﯽ ﺑﺎﺷﺪ( .ﺑﻪ ﺷﺮط ﻣﺜﺒﺖ ﺑﻮدن ξ1دﻗﺖ ﮐﻨﯿﺪ ،اﮔﺮ ξ1ﻣﻨﻔﯽ ﺑﺎﺷﺪ وارد ﺑﺤﺚ
ﭘﺎﺳﺦ ﻣﻌﮑﻮس ﺧﻮاﻫﯿﻢ ﺷﺪ ﮐﻪ ﺑﻌﺪاً ﺷﺮح ﻣﯽﺷﻮد.
در ﺷﮑﻞ 1رﺳﻢ ﺷﺪه ξ1 ﺑﺮاي ﻣﻘﺎدﯾﺮ ﻣﺨﺘﻠﻒ τ 2 = 4و K = 10 ﺳﻪ ﺣﺎﻟﺖ ﺑﺎﻻ ﺑﺮاي ﯾﮏ ﺳﯿﺴﺘﻢ ﻧﻤﻮﻧﻪ ﺑﺎ τ1 = 1و
اﺳﺖ.
ﮔﺮوه ﺷﺒﯿﻪﺳﺎزي و ﮐﻨﺘﺮل ،داﻧﺸﮑﺪه ﻣﻬﻨﺪﺳﯽ ﺷﯿﻤﯽ و ﻧﻔﺖ
داﻧﺸﮕﺎه ﺻﻨﻌﺘﯽ ﺷﺮﯾﻒ
103 ﻫﻔﺘﮥ -6ﺳﺎﯾﺮ ﺳﯿﺴﺘﻤﻬﺎي دﯾﻨﺎﻣﯿﮑﯽ ﺧﻄﯽ
ﺷﮑﻞ .1رﻓﺘﺎر ﯾﮏ ﺳﯿﺴﺘﻢ درﺟﻪ )1و.(2
ﻣﻌﮑﻮس 1 ﺳﯿﺴﺘﻢﻫﺎي ﺑﺎ ﭘﺎﺳﺦ
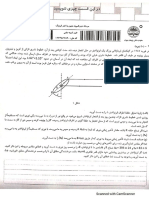
اﮔﺮ ﺟﻬﺖ ﭘﺎﺳﺦ ﭘﻠﻪ ﺳﯿﺴﺘﻤﯽ در اﺑﺘﺪا و ﻟﺤﻈﺎت اوﻟﯿﻪ )ﻓﺮار( ﻋﮑﺲ ﺟﻬﺘﯽ ﺑﺎﺷﺪ ﮐﻪ در ﻧﻬﺎﯾﺖ )ﻗﺮار( ﺑﻪ آن ﻣﯽرﺳﺪ ،آﻧﮕﺎه
ﻣﻮﺳﻮم ﺑﻪ ﺳﯿﺴﺘﻢ ﺑﺎ ﭘﺎﺳﺦ ﻣﻌﮑﻮس ﻣﯽﺷﻮد .ﻣﯽﺗﻮان ﻧﺸﺎن داد ﺟﻬﺖ ﺷﻨﺎﺳﺎﯾﯽ و ﭘﯿﺶﺑﯿﻨﯽ اﯾﻦ رﻓﺘﺎر ﻗﺒﻞ از آزﻣﺎﯾﺶ ﯾﺎ ﺑﺪون
آزﻣﺎﯾﺶ ﺗﺠﺮﺑﯽ و ﻓﻘﻂ ﺑﺎ ﺑﺎزﺑﯿﻨﯽ ﺗﺎﺑﻊ اﻧﺘﻘﺎل ﺑﺎﯾﺪ ﺑﻪ وﺟﻮد ﯾﺎ ﺣﻀﻮر رﯾﺸﻪﻫﺎي ﻣﺜﺒﺖ در ﺻﻮرت ﺗﺎﺑﻊ اﻧﺘﻘﺎل ﺗﻮﺟﻪ ﮐﺮد .در
ﺑﺨﺶ ﻗﺒﻞ ﺗﻤﺎم ﺻﻔﺮﻫﺎي ﺻﻮرت ﺗﺎﺑﻊ اﻧﺘﻘﺎل ﻣﻨﻔﯽ ﺑﻮدﻧﺪ )در ﺣﺎﻟﺖ رﯾﺸﻪ ﮐﻤﭙﻠﮑﺲ ،ﻣﻨﻈﻮرﻣﺎن ﻣﻨﻔﯽﺑﻮدن ﻗﺴﻤﺖ ﺣﻘﯿﻘﯽ
رﯾﺸﻪ ﻣﯽﺑﺎﺷﺪ( ﺑﺮاي ورود ﺑﻪ ﻣﻄﻠﺐ ﯾﮏ ﺳﯿﺴﺘﻢ ﻧﻤﻮﻧﻪ ﻣﺜﻞ ) G (sرا در ﻧﻈﺮ ﺑﮕﯿﺮﯾﺪ:
=
G ) (s ) G1 (s ) − G 2 (s
وﺟﻮد ﻋﻼﻣﺖ ﻣﻨﻔﯽ ﺑﻪ ﻧﻮﻋﯽ رﻗﺎﺑﺖ ﺑﯿﻦ دو دﯾﻨﺎﻣﯿﮏ ﺗﻨﺪ و ﮐﻨﺪ را ﺗﺪاﻋﯽ ﻣﯽﮐﻨﺪ و در ﻧﺘﯿﺠﻪ اﺣﺘﻤﺎل ﭘﺎﺳﺦ ﻣﻌﮑﻮس را
زﯾﺎد ﻣﯽﮐﻨﺪ ﯾﺎ ﻣﺴﺘﻌﺪ ﻣﯽﺳﺎزد .ﻋﻠﺖ ﺑﺪﯾﻦ ﺧﺎﻃﺮ اﺳﺖ ﮐﻪ ﻣﻮد دﯾﻨﺎﻣﯿﮑﯽ دوم )ﯾﻌﻨﯽ ) ( G 2 (sدر رﻗﺎﺑﺖ ﯾﺎ ﺧﻼف ﺟﻬﺖ ﻣﻮد
ﻣﻮد ﻣﺘﻀﺎد ﯾﺎ ﻣﺨﺎﻟﻒ ﻣﯽﮔﻮﯾﯿﻢ .ﺑﻪ ﺑﻪ ) G 2 (s ﻣﻮد اﺻﻠﯽ و ) G1 (s دﯾﻨﺎﻣﯿﮑﯽ اول )ﯾﻌﻨﯽ ) ( G1 (sﻋﻤﻞ ﻣﯽﮐﻨﺪ .ﻣﻌﻤﻮﻻً ﺑﻪ
ﺷﮑﻞ 2رﺟﻮع ﮐﺮده و ﯾﮏ ﻣﺜﺎل ﺳﺎده از اﯾﻦ ﺗﻘﺎﺑﻞ را ﻣﻼﺣﻈﻪ ﮐﻨﯿﺪ:
K1 K2
=
) G (s −
τ1s + 1 τ 2 s + 1
ﻣﺘﻀﺎد K 2 از ﺑﻬﺮه ﻣﻮد اﺻﻠﯽ K 1 ﻫﺮ دو ﻣﺜﺒﺖ ﻫﺴﺘﻨﺪ و ﺑﻬﺮه ﻣﻮد K1و K 2 ﻃﺒﻖ ﺗﻌﺮﯾﻒ )اﺳﺘﺎﻧﺪارد( ﻓﺮض ﻣﯽ ﮐﻨﯿﻢ
ﺑﺰرﮔﺘﺮ ﻣﯽ ﺑﺎﺷﺪ.
1 Inverse-response systems
ﮔﺮوه ﺷﺒﯿﻪﺳﺎزي و ﮐﻨﺘﺮل ،داﻧﺸﮑﺪه ﻣﻬﻨﺪﺳﯽ ﺷﯿﻤﯽ و ﻧﻔﺖ
داﻧﺸﮕﺎه ﺻﻨﻌﺘﯽ ﺷﺮﯾﻒ
104ﮐﻨﺘﺮل ﺧﻄﯽ ﻓﺮآﯾﻨﺪﻫﺎ )(26346
ﺷﮑﻞ .2ﯾﮏ ﺳﯿﺴﺘﻢ رﻗﺎﺑﺘﯽ داراي ﭘﺎﺳﺦ ﻣﻌﮑﻮس.
ﺣﺎل ﺑﻪ ﻃﻮر اﺳﺘﺸﻤﺎﻣﯽ ﻧﯿﺰ ﻣﯽﺗﻮان درﯾﺎﻓﺖ ﮐﻪ ﺑﺴﺘﻪ ﺑﻪ ﻣﻘﺎدﯾﺮ τ1و τ 2ﻣﻤﮑﻦ اﺳﺖ در ﻟﺤﻈﺎت اوﻟﯿﻪ ،ﻣﻮد ﻣﺨﺎﻟﻒ از
ﻣﻮد اﺻﻠﯽ ﺟﻠﻮ ﺑﺰﻧﺪ وﻟﯽ در ﻧﻬﺎﯾﺖ ﻋﻘﺐ ﺑﯿﺎﻓﺘﺪ .ﺑﻪ ﻫﺮ ﺣﺎل اﮔﺮ ﺑﺨﻮاﻫﯿﻢ ﺑﻪ ﻃﻮر ﮐﻤّﯽ و دﻗﯿﻖ ﺑﻪ اﯾﻦ ﻣﺴﺎﻟﻪ ﺑﭙﺮدازﯾﻢ ،ﺑﻪ
ﭘﺎﺳﺦ ﭘﻠﻪ )ﭘﺎﺳﺦ ﭘﺎﯾﻪ( ﭘﺮداﺧﺘﻪ و رﻓﺘﺎر ﯾﮑﻨﻮاﺧﺖ و دﯾﻨﺎﻣﯿﮑﯽ آن را ﺑﺮرﺳﯽ ﻣﯽﮐﻨﯿﻢ .ﻣﻘﺪار ﻧﻬﺎﯾﯽ ﭘﺎﺳﺦ ﭘﻠﻪ واﺣﺪ از راﺑﻄﻪ زﯾﺮ
y (∞)= G (0)= G1 (0) − G 2 (0)= K 1 − K 2 ﺑﺪﺳﺖ ﻣﯽآﯾﺪ:
ﻟﺬا ﻣﻘﺪار ﻧﻬﺎﯾﯽ ﯾﮏ ﻣﻘﺪار ﻣﺜﺒﺖ ﻣﯽ ﺑﺎﺷﺪ .ﺣﺎل ﺑﻪ ﻣﻘﺪار ﺷﯿﺐ اوﻟﯿﻪ ﭘﺎﺳﺦ ﻣﯽ ﭘﺮدازﯾﻢ: ﮐﺮدﯾﻢ K 1 K 2 و ﭼﻮن ﻓﺮض
dy d y1 d y 2 K1 K 2
=
dt − dt = −
dt t =0 t =0 τ1 τ 2
در ﻧﺘﯿﺠﻪ اﮔﺮ ﻧﺴﺒﺖ k 1 τﮐﻮﭼﮑﺘﺮ از ﻧﺴﺒﺖ k 1 τﺑﺎﺷﺪ آﻧﮕﺎه ﺷﯿﺐ ﻣﺮﺑﻮﻃﻪ ﻣﻨﻔﯽ ﺷﺪه و ﻣﻨﺠﺮ ﺑﻪ ﭘﺎﺳﺦ ﻣﻌﮑﻮس
2 1
ﻣﯽﺷﻮد )ﺷﮑﻞ 3را ﺑﺒﯿﻨﯿﺪ( .ﺑﺮاي ﻣﺜﺎلِ اﺳﺘﺎﻧﺪارد ﺧﻮدﻣﺎن )ﯾﻌﻨﯽ ،( k 1 k > 1ﺷﺮط ﺑﺎﻻ ﺳﺎدهﺗﺮ ﺷﺪه و ﺑﻪ ﺻﻮرت τ 2 < τ 1
2
درﻣﯽآﯾﺪ:
K1 K2 K1 τ
( ⇒ 1) ⇒ 1 1 ⇒ τ 2 τ1
τ1 τ2 K2 τ2
ﺷﮑﻞ .3ﭘﺎﺳﺦ ﭘﻠﻪ ﯾﮏ ﺳﯿﺴﺘﻢ رﻗﺎﺑﺘﯽ داراي ﭘﺎﺳﺦ ﻣﻌﮑﻮس.
ﮔﺮوه ﺷﺒﯿﻪﺳﺎزي و ﮐﻨﺘﺮل ،داﻧﺸﮑﺪه ﻣﻬﻨﺪﺳﯽ ﺷﯿﻤﯽ و ﻧﻔﺖ
داﻧﺸﮕﺎه ﺻﻨﻌﺘﯽ ﺷﺮﯾﻒ
105 ﻫﻔﺘﮥ -6ﺳﺎﯾﺮ ﺳﯿﺴﺘﻤﻬﺎي دﯾﻨﺎﻣﯿﮑﯽ ﺧﻄﯽ
اﯾﻦ ﺷﺮط ﻣﻌﻘﻮل و ﻣﻌﺘﺒﺮ اﺳﺖ ﭼﻮن داراي ﺗﻌﺒﯿﺮ ﻓﯿﺰﯾﮑﯽ ﻣﯽ ﺑﺎﺷﺪ .در ﺑﺤﺚ ﺳﯿﺴﺘﻢ ﻫﺎي درﺟﻪ اول ،ﻫﺮ ﭼﻪ τﯾﺎ ﺛﺎﺑﺖ
زﻣﺎﻧﯽ ﮐﻮﭼﮑﺘﺮ ﺑﺎﺷﺪ ،ﺳﯿﺴﺘﻢ داراي دﯾﻨﺎﻣﯿﮏ ﺳﺮﯾﻊﺗﺮ ﻣﯽﺑﺎﺷﺪ .ﻟﺬا ﻣﻮد ﻣﺨﺎﻟﻒ )ﺑﺎ ﺛﺎﺑﺖ زﻣﺎﻧﯽ ( τ 2در ﻟﺤﻈﺎت اوﻟﯿﻪ از ﺧﻮد
)ﻣﻮد اﺻﻠﯽ( ﺟﻠﻮﺗﺮ ﻣﯽاﻓﺘﺪ وﻟﯽ در ﻧﻬﺎﯾﺖ ﭼﻮن داراي ﺑﻬﺮة ﮐﻮﭼﮑﺘﺮي اﺳﺖ ﺑﻪ y1 ﺗﻨﺪي و ﺗﯿﺰي ﺑﯿﺸﺘﺮ ﻧﺸﺎن ﻣﯽدﻫﺪ و از
ﻫﻤﮕﺮا ﯾﺎ ﯾﮑﻨﻮاﺧﺖ ﻣﯽ ﺷﻮد. y2 ﻣﻘﺪار ﮐﻤﺘﺮي از
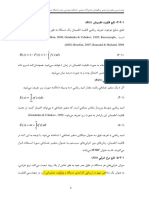
ﻣﺤﺾ 1 ﺳﯿﺴﺘﻢ ﻫﺎي داراي ﺗﺎﺧﯿﺮ
اﯾﻦ ﻧﻮع ﺳﯿﺴﺘﻢ ﻫﺎ ﺑﻌﺪ از ﺗﻐﯿﯿﺮ در ورودي ﺑﻼﻓﺎﺻﻠﻪ ﺷﺮوع ﺑﻪ ﺗﻐﯿﯿﺮ ﻧﻤﯽﮐﻨﻨﺪ و اﻧﮕﺎر داراي ﻧﻮﻋﯽ ﺣﺎﻓﻈﻪ و ﻫﻮﺷﻤﻨﺪي
ﺑﻮده ﺑﻪﻃﻮري ﮐﻪ ﺑﻌﺪ از ﻣﺪت زﻣﺎن ﻣﺤﺪودي ،ﺷﺮوع ﺑﻪ اﻧﻔﻌﺎل و ﭘﺎﺳﺦ ﻣﯽﮐﻨﻨﺪ .در ﻓﺮآﯾﻨﺪﻫﺎي واﻗﻌﯽ اﯾﻦ رﻓﺘﺎر ﻣﻮﺳﻮم ﺑﻪ
ﺗﺎﺧﯿﺮ اﻧﺘﻘﺎﻟﯽ 2در ﺳﯿﺴﺘﻢﻫﺎي ﺟﺮﯾﺎندار ،و ﺗﺎﺧﯿﺮِ اﻧﺪازهﮔﯿﺮي 3در ﺳﻨﺴﻮرﻫﺎي ﻧﻤﻮﻧﻪﺑﺮداري )ﻣﺜﻞ آﻧﺎﻟﯿﺰور ﻏﻠﻈﺖ و (GC
v ﻫﺴﺘﻨﺪ .ﺑﺮاي ﺳﯿﺴﺘﻢﻫﺎي ﺟﺮﯾﺎندار ﻣﻘﺪار اﯾﻦ ﺗﺎﺧﯿﺮ ﺑﻪ ﻃﻮر ﺗﻘﺮﺑﯽ ﺑﺎ L vﺑﯿﺎن ﻣﯽ ﺷﻮد ﺑﻪ ﻃﻮري ﮐﻪ Lﻃﻮل ﻟﻮﻟﻪ و
ﺳﺮﻋﺖ ﺧﻄﯽ ﺳﯿﺎل در ﻟﻮﻟﻪ ﻣﯽ ﺑﺎﺷﺪ )ﺷﮑﻞ .(4ﺑﺮاي ﺳﯿﺴﺘﻢﻫﺎي اﻧﺪازهﮔﯿﺮي ﻧﯿﺰ ﻣﻘﺪار ﺗﺄﺧﯿﺮ ﺗﻮﺳﻂ ﺳﺎزﻧﺪه اﻋﻼم ﻣﯽﺷﻮد،
ﭼﻮن ﺗﻘﺮﯾﺒﺎً ﻣﻌﺎدﻟﺴﺖ ﺑﺎ زﻣﺎن ﭘﺮدازش ﻧﻤﻮﻧﻪ.
ﺷﮑﻞ .4ﺳﯿﺴﺘﻢ ﺗﺎﺧﯿﺮ اﻧﺘﻘﺎﻟﯽ و ﺗﺎﺑﻊ اﻧﺘﻘﺎل ﺗﺎﺧﯿﺮ ﻣﺤﺾ.
ﺗﺎﺑﻊ اﻧﺘﻘﺎل ﺳﯿﺴﺘﻢ ﺗﺎﺧﯿﺮي ﺑﻪ ﺻﻮرت ﻧﻤﺎﯾﯽ ﻣﯽﺑﺎﺷﺪ )ﺷﮑﻞ (4و ﻫﻤﺎنﻃﻮر ﮐﻪ ﻣﻼﺣﻈﻪ ﻣﯽﺷﻮد ﯾﮏ ﺗﺎﺑﻊ اﻧﺘﻘﺎل ﮔﻮﯾﺎ
ﺑﻪ ﺗﻮان ﻧﺮﺳﯿﺪه اﺳﺖ و ﺑﻠﮑﻪ ﺧﻮد sدر ﺗﻮان ﻇﺎﻫﺮ ﺷﺪه اﺳﺖ .ﻟﺬا ،در ﻣﻘﺎم ﻣﻘﺎﯾﺴﻪ ﺑﺎ ﻋﺒﺎرات ﭼﻨﺪﺟﻤﻠﻪاي s ﻧﯿﺴﺖ ،ﯾﻌﻨﯽ
ﻣﺤﺪود ،ﺑﻪ ﺳﯿﺴﺘﻤﻬﺎي ﺗﺄﺧﯿﺮي ،ﺳﯿﺴﺘﻤﻬﺎي دﯾﻔﺮاﻧﺴﯿﻠﯽ ﺑﺎ »درﺟﮥ ﻧﺎﻣﺤﺪود« اﻃﻼق ﻣﯽﺷﻮد ﭼﺮا ﮐﻪ ﺑﺴﻂ ﺗﯿﻠﻮر ﺗﻮاﺑﻊ ﻧﻤﺎﯾﯽ
ﯾﮏ ﺳﺮي ﺗﻮاﻧﯽ ﺑﺎ ﺗﻌﺪاد ﺟﻤﻼت ﻧﺎﻣﺤﺪود ﺧﻮاﻫﺪ ﺑﻮد.
ﭘﺎﺳﺦ ﺳﯿﺴﺘﻢﻫﺎي ﺣﺎوي ﺗﺎﺧﯿﺮ ﻣﺤﺾ دﻗﯿﻘﺎ ﻣﺜﻞ ورودي ﻣﯽﺑﺎﺷﺪ ،ﺑﺎ اﯾﻦ ﺗﻔﺎوت ﮐﻪ τ dﻟﺤﻈﻪ ﺑﻌﺪ ﺷﺮوع ﺑﻪ ﺗﻐﯿﯿﺮ ﻣﯽﮐﻨﺪ
)ﺷﮑﻞ.(5
در ﯾﮏ ﺗﺎﺑﻊ اﻧﺘﻘﺎل ﺗﺮﮐﯿﺒﯽ اﻟﺰاﻣﺎ ﺑﻪ ﻣﻔﻬﻮم ﺗﺄﺧﯿﺮ اﻧﺘﻘﺎﻟﯽ ﻧﯿﺴﺖ و ﺑﻠﮑﻪ ﺷﺎﯾﺪ ﺑﻪ ﺧﺎﻃﺮ e −τ d s
ﻻزم ﺑﻪ ذﮐﺮ اﺳﺖ ﮐﻪ وﺟﻮد
ﺳﺎدهﺳﺎزي و ﻣﺪلﺳﺎزي ﺗﺠﺮﺑﯽ ﺑﺎﺷﺪ .ﺑﻪ ﻃﻮر ﻣﺜﺎل ﻣﻤﮑﻦ اﺳﺖ ﯾﮏ ﺳﯿﺴﺘﻢ ﻣﺘﻮاﻟﯽ و ﻣﺘﺸﮑﻞ از 8ﺳﯿﺴﺘﻢ درﺟﻪ اول –
ﺟﻤﻌﺎً ﺷﺎﻣﻞ 16ﭘﺎراﻣﺘﺮ -را ﺑﺎ ﯾﮏ ﺗﺎﺑﻊ اﻧﺘﻘﺎل درﺟﻪ اول ﻫﻤﺮاه ﺑﺎ ﺗﺄﺧﯿﺮ زﻣﺎﻧﯽ 4ﺗﻘﺮﯾﺐ ﺑﺰﻧﯿﻢ .ﻣﺪل )ﺗﺎﺑﻊ اﻧﺘﻘﺎل( اﺧﯿﺮ ﻓﻘﻂ
ﺷﺎﻣﻞ 3ﭘﺎراﻣﺘﺮ ﯾﻌﻨﯽ ﺑﻬﺮة ﯾﮑﻨﻮاﺧﺖ ،ﺛﺎﺑﺖ زﻣﺎﻧﯽ و زﻣﺎن ﻣﺮده اﺳﺖ) .ﺑﻪ ﺷﮑﻞﻫﺎي 6و 7رﺟﻮع ﮐﻨﯿﺪ(.
3 Measurement lag 1 pure lag system
4 First Order Plus Lag - FOPL 2 Transport delay
ﮔﺮوه ﺷﺒﯿﻪﺳﺎزي و ﮐﻨﺘﺮل ،داﻧﺸﮑﺪه ﻣﻬﻨﺪﺳﯽ ﺷﯿﻤﯽ و ﻧﻔﺖ
داﻧﺸﮕﺎه ﺻﻨﻌﺘﯽ ﺷﺮﯾﻒ
106ﮐﻨﺘﺮل ﺧﻄﯽ ﻓﺮآﯾﻨﺪﻫﺎ )(26346
ﺷﮑﻞ .6ﺳﯿﺴﺘﻢ ﺗﺎﺧﯿﺮ اﻧﺘﻘﺎﻟﯽ ﻣﺤﺾ.
ﺷﮑﻞ .7ﻣﻌﺎدلﺳﺎزي ﺗﻘﺮﯾﺒﯽ ﯾﮏ ﺳﯿﺴﺘﻢ درﺟﻪ ﻫﺸﺘﻢ ﺑﺎ ﯾﮏ ﺳﯿﺴﺘﻢ درﺟﻪ اول ﻫﻤﺮاه ﺑﺎ ﺗﺎﺧﯿﺮ اﻧﺘﻘﺎﻟﯽ.
ﺷﮑﻞ -7ﻣﻘﺎﯾﺴﻪ ﭘﺎﺳﺦ ﭘﻠﻪ ﺳﯿﺴﺘﻢ درﺟﻪ ﻫﺸﺘﻢ ﺑﺎ ﺳﯿﺴﺘﻢ درﺟﻪ اول ﻫﻤﺮاه ﺑﺎ ﺗﺎﺧﯿﺮ اﻧﺘﻘﺎﻟﯽ.
ﺑﻄﻮر ﺧﻼﺻﻪ ،ﺗﺄﺧﯿﺮ ﻣﺤﺾ – ﻣﺼﻄﻠﺤﺎً زﻣﺎن ﻣﺮده – ﯾﺎ واﻗﻌﯽ اﺳﺖ ﯾﺎ ﻣﺠﺎزي؛ اﮔﺮ واﻗﻌﯽ ﺑﺎﺷﺪ ،ﯾﺎ در »ورودي« اﺗﻔﺎق
ﻣﯽاﻓﺘﺪ )ﻣﺜﻼً ﺑﺪﻟﯿﻞ زﻣﺎن ﺣﺮﮐﺖ و اﻧﺘﻘﺎل ﺳﯿﺎل در ﻟﻮﻟﻪ( ﯾﺎ در »ﺧﺮوﺟﯽ« )ﻣﺜﻼً ﺑﺨﺎﻃﺮ زﻣﺎن ﻧﻤﻮﻧﻪﺑﺮداري و اﻧﺪازهﮔﯿﺮي
ﮔﺮوه ﺷﺒﯿﻪﺳﺎزي و ﮐﻨﺘﺮل ،داﻧﺸﮑﺪه ﻣﻬﻨﺪﺳﯽ ﺷﯿﻤﯽ و ﻧﻔﺖ
داﻧﺸﮕﺎه ﺻﻨﻌﺘﯽ ﺷﺮﯾﻒ
107 ﻫﻔﺘﮥ -6ﺳﺎﯾﺮ ﺳﯿﺴﺘﻤﻬﺎي دﯾﻨﺎﻣﯿﮑﯽ ﺧﻄﯽ
داﻧﺴﯿﺘﻪ ﯾﺎ ﻏﻠﻈﺖ ﻣﻮاد( .اﮔﺮ ﻫﻢ ﻣﺠﺎزي ﺑﺎﺷﺪ ،ﺻﺮﻓﺎً ﺑﺮاي ﻣﺪﻟﺴﺎزي ﺗﻘﻠﯿﻠﯽ و ﺗﺠﺮﺑﯽ ﯾﻌﻨﯽ ﺑﺮﺧﻮرداري ﺣﺪاﻗﻠﯽ از ﭘﺎراﻣﺘﺮﻫﺎي
ﻗﺎﺑﻞ ﺗﺨﻤﯿﻦ ﺻﻮرت ﻣﯽﭘﺬﯾﺮد.
ﺗﻘﺮﯾﺐ ﭘَﺪِه - 1در ﺑﺴﯿﺎري از ﻣﻄﺎﻟﻌﺎت ﺗﺤﻠﯿﻠﯽ و ﻃﺮاﺣﯽ ﻣﻤﮑﻦ اﺳﺖ ﺑﺨﻮاﻫﯿﻢ ﺑﺎ ﭼﻨﺪ ﺟﻤﻠﻪايﻫﺎ ﮐﺎر ﮐﻨﯿﻢ و وﺟﻮد ﺟﻤﻠﻪ
e −τﯾﮏ وﺻﻠﻪ ﻧﺎﺟﻮر ﺑﻪﺷﻤﺎر آﯾﺪ .ﯾﮏ راه ﻣﺘﺪاول ﺑﺮاي ﺗﻘﺮﯾﺐ ﺟﻤﻠﻪ ﻧﻬﺎﯾﯽ ﺑﺎ ﭼﻨﺪ ﺟﻤﻠﻪاي اﺳﺘﻔﺎده از ﺗﻘﺮﯾﺐ ds
ﻧﻤﺎﯾﯽ ﻣﺜﻞ
ﭘﺎدة درﺟﻪ اول ﻣﯽﺑﺎﺷﺪ:
τ
1− d s 2 −τ s
−τ d s e −τ d s /2 = 2
e ≈ = +τ s /2 d
e d τd 2 + τd s
1+ s
2
دﻗﺖ ﺷﻮد ﮐﻪ دﻟﯿﻞ ﺷﮑﺴﺘﻦ ﻋﺒﺎرت ﺗﻮان ﺑﻪ دو ﺗﮑﻪ ﻧﯿﻤﻪ ،اوﻻً( ﺑﻪﺧﺎﻃﺮ ﺑﺎﻻﺑﺮدن دﻗﺖ ﺗﻘﺮﯾﺐ و ﺛﺎﻧﯿﺎً( ﺟﻬﺖ ﭘﺮﻫﯿﺰ از
ﻧﺎﺳﺮهﺷﺪن ﻣﺪل ﺗﻘﺮﯾﺒﯽ اﺳﺖ .ﺑﺪﯾﻦ ﺗﺮﺗﯿﺐ ،ﻣﺪل ﺗﻘﺮﯾﺒﯽ ﻋﻤﻼً ﯾﮏ ﻓﺮم »ﻫﻮﯾﺴﺎﯾﺪ« از ﻋﺒﺎرت ﺗﺄﺧﯿﺮ ﻣﻄﻠﻖ و زﻣﺎن ﻣﺮده
ﺧﻮاﻫﺪ داﺷﺖ .ﯾﺎدآوري ﻣﯽﺷﻮد ،ﻓﺮم ﻫِﻮﯾﺴﺎﯾﺪ ،ﻧﺴﺒﺖ ﯾﺎ ﮐﺴﺮ دو ﭼﻨﺪﺟﻤﻠﻪاي اﺳﺖ.
ﺑﻄﺮﯾﻖ ﻣﺸﺎﺑﻪ ،ﻣﯽﺗﻮان ﺑﺮاي اﺧﺬ دﻗﺖ ﺑﺎﻻﺗﺮ ،ﺟﻤﻼت ﺑﺴﻂ )ﺗﻘﺮﯾﺐ( ﺗﯿﻠﻮر را ﺑﯿﺸﺘﺮ از دو ﺟﻤﻠﻪ در ﻧﻈﺮ ﮔﺮﻓﺖ .ﺑﻄﻮر
ﻣﺜﺎل» ،ﺗﻘﺮﯾﺐ ﺳَﺮة درﺟﻪ دوم ﭘﺎدِه«؛
𝑑𝑑𝜏𝜏 𝜏𝜏𝑑𝑑2 2
1− 𝑠𝑠 +
𝑠𝑠 𝑑𝑑𝜏𝜏𝑒𝑒 − ≅ 2 𝑠𝑠 12
𝜏𝜏 𝜏𝜏𝑑𝑑2 2
1 + 2𝑑𝑑 𝑠𝑠 + 12 𝑠𝑠
و »ﺗﻘﺮﯾﺐ ﺳﺮة درﺟﻪ ﺳﻮم ﭘَﺪِه« ﺑﻪ ﺷﮑﻞ ﻧﻬﺎﯾﯽ زﯾﺮ در ﻣﯽآﯾﺪ؛
𝑑𝑑𝜏𝜏 𝜏𝜏𝑑𝑑2 2 𝜏𝜏𝑑𝑑3 3
1− 𝑠𝑠 + 𝑠𝑠 −
𝑠𝑠 𝑑𝑑𝜏𝜏𝑒𝑒 − ≅ 2 10 𝑠𝑠 120
𝜏𝜏 𝜏𝜏 2
𝜏𝜏 3
1 + 𝑑𝑑 𝑠𝑠 + 𝑑𝑑 𝑠𝑠 2 + 𝑑𝑑 𝑠𝑠 3
2 10 120
ﺗﻘﺮﯾﺐ ﺣﺪي 𝑁𝑁 ﺳﯿﺴﺘﻢ درﺟﻪ اول – ﻫﻤﺎﻧﻄﻮر ﮐﻪ ﭘﯿﺸﺘﺮ ذﮐﺮ ﺷﺪ ،در ﭼﯿﺪﻣﺎن ﻣﺘﻮاﻟﯽ ﭼﻨﺪ ﺳﯿﺴﺘﻢ درﺟﻪ اول ،ﭘﺎﺳﺦ
آﺧﺮﯾﻦ ﺳﯿﺴﺘﻢ ﻧﺴﺒﺖ ﺑﻪ ورودي ﭘﻠﻪ در ﺳﯿﺴﺘﻢ اول ،از ﺗﯿﺰي ﭘﻠﻪ ﮐﺎﺳﺘﻪ ﺷﺪه و ﺑﺎ ردﺷﺪن از ﻫﺮ ﺳﯿﺴﺘﻢ ﭘﺎﯾﯿﻦدﺳﺘﯽ ،ﭘﺎﺳﺦ
ﺧﺮوﺟﯽ »ﭘَﺦﺗﺮ« ﺷﺪه و اﻧﮕﺎر ﺗﺄﺧﯿﺮدار ﻣﯽﺷﻮد .ﺣﺎل اﮔﺮ ﺣﺎﻟﺖ ﺣﺪيِ ﺑﯽﻧﻬﺎﯾﺖ ﺗﺎﻧﮏ ﯾﺎ ﺳﯿﺴﺘﻢ درﺟﻪ اول را ﺑﺪﺳﺖ آورﯾﻢ،
ﺷﺎﯾﺪ ﺑﺘﻮاﻧﯿﻢ ﺗﻘﺮﯾﺐ ﻣﻨﺎﺳﺒﯽ از ﺟﻤﻠﮥ 𝑠𝑠𝑑𝑑𝜏𝜏 𝑒𝑒 −ﺑﺪﺳﺖ آورﯾﻢ .ﺑﺮاي ﻣﺤﺎﺳﺒﮥ ﺗﺎﺑﻊ اﻧﺘﻘﺎل 𝑁𝑁 ﺳﯿﺴﺘﻢ ﺳﺮي ﺑﺎ ﺑﻬﺮة واﺣﺪ و ﺛﺎﺑﺖ
زﻣﺎﻧﯽ 𝑁𝑁�𝑑𝑑𝜏𝜏 ،ﮐﺎﻓﯿﺴﺖ آﻧﻬﺎ را در ﻫﻢ ﺿﺮب ﮐﻨﯿﻢ؛
1
= )𝑠𝑠( 𝑁𝑁𝑔𝑔 𝑁𝑁
𝑑𝑑𝜏𝜏
�� 𝑠𝑠 + 1
𝑁𝑁
ﺣﺎل ،در ﺣﺎﻟﺖ ﺣﺪيِ ∞ → 𝑁𝑁 ،ﺗﺎﺑﻊ اﻧﺘﻘﺎل ﻣﺮﺑﻮﻃﻪ ﺑﻪ ﺷﮑﻞ زﯾﺮ ﺑﺪﺳﺖ ﻣﯽآﯾﺪ؛
1
lim 𝑔𝑔𝑁𝑁 (𝑠𝑠) = lim 𝑁𝑁
∞→𝑁𝑁 ∞→𝑁𝑁 𝜏𝜏
�� 𝑑𝑑 𝑠𝑠 + 1
𝑁𝑁
ﻋﺒﺎرت ﺳﻤﺖ راﺳﺖ ﺑﺴﯿﺎر ﺷﺒﯿﻪ ﺗﻌﺮﯾﻒ ﻋﺪد ﻫﻨﺪﺳﯽ )ﻏﯿﺮﺟﺒﺮي( ﻧِﭙِﺮ اﺳﺖ؛
1 Pade’s approximation
ﮔﺮوه ﺷﺒﯿﻪﺳﺎزي و ﮐﻨﺘﺮل ،داﻧﺸﮑﺪه ﻣﻬﻨﺪﺳﯽ ﺷﯿﻤﯽ و ﻧﻔﺖ
داﻧﺸﮕﺎه ﺻﻨﻌﺘﯽ ﺷﺮﯾﻒ
108ﮐﻨﺘﺮل ﺧﻄﯽ ﻓﺮآﯾﻨﺪﻫﺎ )(26346
𝑚𝑚 1
� 𝑒𝑒 = lim �1 +
∞→𝑚𝑚 𝑚𝑚
و در ﻧﺘﯿﺠﻪ؛
𝑚𝑚 𝑑𝑑𝜏𝜏−
1 1
𝑒𝑒 −𝜏𝜏𝑑𝑑 = lim �1 + � = lim
∞→𝑚𝑚 𝑚𝑚 ∞→𝑚𝑚 𝑚𝑚 𝑑𝑑𝜏𝜏 1
� �1 +
𝑚𝑚
𝑠𝑠𝑑𝑑𝜏𝜏 𝑒𝑒 −ﺧﻮاﻫﯿﻢ داﺷﺖ؛ ﺣﺎل ﺑﺎ ﻗﺮاردادن 𝑚𝑚 𝑑𝑑𝜏𝜏 = 𝑁𝑁 در راﺑﻄﮥ ﻓﻮق و ﺳﭙﺲ ﻣﻘﺎﯾﺴﮥ ﻋﺒﺎرات ﻣﺎﻓﻮق ،ﺑﺮاي ﻋﺒﺎرت
𝑠𝑠 𝑑𝑑𝜏𝜏lim 𝑔𝑔𝑁𝑁 (𝑠𝑠) = 𝑒𝑒 −
∞→𝑁𝑁
ﺑﺪﯾﻦ ﺗﺮﺗﯿﺐ ﺑﺎ ﻓﺮضﮔﺮﻓﺘﻦ ﯾﮏ ﻋﺪد ﺑﺰرگ ﻣﺜﻞ 15ﯾﺎ ) 20ﺑﺮاي 𝑁𝑁 ﯾﺎ ﻫﻤﺎن ﺗﻌﺪاد ﻇﺮوف ﻣﺘﻮاﻟﯽ( ﻣﯽﺗﻮان ﺑﻪ ﯾﮏ
ﺗﻘﺮﯾﺐ ﺧﻮب اﮐﯿﺪاً ﺳﺮه ﺑﺮاي ﻋﺒﺎرت ﺗﺄﺧﯿﺮ ﻣﺤﺾ رﺳﯿﺪ.
ﮔﺮوه ﺷﺒﯿﻪﺳﺎزي و ﮐﻨﺘﺮل ،داﻧﺸﮑﺪه ﻣﻬﻨﺪﺳﯽ ﺷﯿﻤﯽ و ﻧﻔﺖ
داﻧﺸﮕﺎه ﺻﻨﻌﺘﯽ ﺷﺮﯾﻒ
You might also like
- Signals SystemsDocument119 pagesSignals SystemsshahabcontrolNo ratings yet
- Signals and SystemsDocument119 pagesSignals and SystemsAdel HabibiNo ratings yet
- File 7174Document23 pagesFile 7174asNo ratings yet
- 4 5938527026775328085Document44 pages4 5938527026775328085Ashebir TaresaNo ratings yet
- Stochastic HW 3Document3 pagesStochastic HW 3asmaborvayeh98No ratings yet
- Electric Circuits II Ch3Document12 pagesElectric Circuits II Ch3mahdikurdeh77No ratings yet
- Computer GraphicsDocument38 pagesComputer GraphicsmajidNo ratings yet
- Advanced ControlDocument63 pagesAdvanced Controlعلیرضا جعفرنژادNo ratings yet
- Nemoone SoalDocument2 pagesNemoone SoalshahabcontrolNo ratings yet
- دانلود قسمتی از کتاب ري - 2Document35 pagesدانلود قسمتی از کتاب ري - 2Elaine JohnsonNo ratings yet
- 0 Labs For System Identification CourseDocument13 pages0 Labs For System Identification CoursealexmontogoNo ratings yet
- Fasl 4Document82 pagesFasl 4S.mohsen AhmadiNo ratings yet
- @kanoonir 11rDocument14 pages@kanoonir 11rAlirezaNo ratings yet
- 020 064 C292 1Document45 pages020 064 C292 1Taghi KhajeNo ratings yet
- HW05Document2 pagesHW05PAPANo ratings yet
- 162 ADocument16 pages162 Aroham meNo ratings yet
- Am HW1Document4 pagesAm HW1ehsan ardeshiriNo ratings yet
- @kanoonir 11rDocument22 pages@kanoonir 11rAlirezaNo ratings yet
- @kanoonir 11rDocument22 pages@kanoonir 11rAlirezaNo ratings yet
- LADocument5 pagesLAjavad konjiNo ratings yet
- Electric Circuit Chapter 1Document20 pagesElectric Circuit Chapter 1مهدی ارغوانیNo ratings yet
- ControlzargarinejadDocument105 pagesControlzargarinejadSomayeh YarahmadiNo ratings yet
- Powsys 3Document28 pagesPowsys 3ehsan.abdollahi.62No ratings yet
- پاسخنامه میان نوبت دوم ریاضی نهمDocument4 pagesپاسخنامه میان نوبت دوم ریاضی نهمFortnite BallsNo ratings yet
- دفترچه سوال و پاسخ تشریحی آزمون ها (PDF) - دفترچه سوال و پاسخ تشریحی آزمون آزمایشی مرحله 6 (متن) - 117167Document16 pagesدفترچه سوال و پاسخ تشریحی آزمون ها (PDF) - دفترچه سوال و پاسخ تشریحی آزمون آزمایشی مرحله 6 (متن) - 117167Sepanta AbdolahpourNo ratings yet
- Week03 Ed09Document27 pagesWeek03 Ed09shahrzad ...No ratings yet
- Nokteph 1Document4 pagesNokteph 1vczq6v5v6sNo ratings yet
- ChapterDocument11 pagesChapterمحمد قمیشیNo ratings yet
- Moadele Dareje 1Document28 pagesMoadele Dareje 1Omid GhNo ratings yet
- مقاومت مصالح 3-1 PDFDocument73 pagesمقاومت مصالح 3-1 PDFmahdiNo ratings yet
- 2008 PerDocument2 pages2008 Perchoco lateNo ratings yet
- ProblemsDocument5 pagesProblemsGanesh DuraisamyNo ratings yet
- x1 151Document10 pagesx1 151bitamasomi.nanophysicsNo ratings yet
- x1 151Document10 pagesx1 151bitamasomi.nanophysicsNo ratings yet
- Tasaod Hesabi - 2Document2 pagesTasaod Hesabi - 2vampire.hunter99No ratings yet
- Micro1 Chapter5Document61 pagesMicro1 Chapter5GholamReza Keshavarz HaddadNo ratings yet
- تمرین سری اولDocument1 pageتمرین سری اولashkan zarkhahNo ratings yet
- استخراج معادله حرکت - 091302Document8 pagesاستخراج معادله حرکت - 091302amirmohammadkarimi91No ratings yet
- Fa IRDocument3 pagesFa IRgelumntrezNo ratings yet
- Week04 Ed09Document20 pagesWeek04 Ed09shahrzad ...No ratings yet
- p = c m sinh (αDocument11 pagesp = c m sinh (αbitamasomi.nanophysicsNo ratings yet
- Ø Ù Ø Ù Ø Ø Ø Ø Ù Ù Ù Ø Û Ù Ø Ù Ø Ø Ø ÙDocument18 pagesØ Ù Ø Ù Ø Ø Ø Ø Ù Ù Ù Ø Û Ù Ø Ù Ø Ø Ø ÙbxanyNo ratings yet
- اختلاف محدودDocument32 pagesاختلاف محدودsaiedNo ratings yet
- عدد شرطیDocument10 pagesعدد شرطیmaryam afzaliNo ratings yet
- محاسبه عدد شرطیDocument10 pagesمحاسبه عدد شرطیmaryam afzaliNo ratings yet
- Lecture 21Document4 pagesLecture 21bahram bahramiNo ratings yet
- 8Document16 pages8Omidreza NazariNo ratings yet
- Nokteph 3Document15 pagesNokteph 3vczq6v5v6sNo ratings yet
- مقدمه اي بر المان محدودDocument34 pagesمقدمه اي بر المان محدودpoodiaa100% (1)
- A4 Num 021Document13 pagesA4 Num 021hasan hasaniNo ratings yet
- Linear Control LabDocument24 pagesLinear Control Labعلیرضا جعفرنژادNo ratings yet
- Soal R8 Fsl4+PDocument10 pagesSoal R8 Fsl4+PPooya AmirzadehNo ratings yet
- Book 14 PDFDocument17 pagesBook 14 PDFReza M100% (1)
- عرفان رئوفی 9732740 - آزمایش 4 کنترل خطیDocument16 pagesعرفان رئوفی 9732740 - آزمایش 4 کنترل خطیaliamooie49No ratings yet
- 1 ReliabilityDocument3 pages1 Reliabilitylovepishga,No ratings yet