Download as pdf or txt
You might also like
- Standard Parameter 2G - 3G - 4G ZTEDocument39 pagesStandard Parameter 2G - 3G - 4G ZTENangNo ratings yet
- Unit 1. Earth and The Universe PDFDocument11 pagesUnit 1. Earth and The Universe PDFevaNo ratings yet
- Computer System Architecture Chapter 1 Part 5Document8 pagesComputer System Architecture Chapter 1 Part 5Vansh RanaNo ratings yet
- Computer System Architecture Notes Part 1Document6 pagesComputer System Architecture Notes Part 1Vansh RanaNo ratings yet
- Addition Subtaction.: 1onsfer Dpetotots Avaliability Micio-OpeiationDocument3 pagesAddition Subtaction.: 1onsfer Dpetotots Avaliability Micio-OpeiationBlack PantherNo ratings yet
- RCS Minuteslast Minute Notes PDFDocument9 pagesRCS Minuteslast Minute Notes PDFPriyansu SahaNo ratings yet
- PDC Assignment No-1 (DhirajKumar Bairy)Document8 pagesPDC Assignment No-1 (DhirajKumar Bairy)atikpNo ratings yet
- Chapter 4 Java PDFDocument6 pagesChapter 4 Java PDFariNo ratings yet
- JAVA Imp THEORYDocument13 pagesJAVA Imp THEORYoffsechouseNo ratings yet
- Coa 2100031279Document3 pagesCoa 2100031279Dheeraj MusunuriNo ratings yet
- 196R1A0429 CAO Assignment 2 SurendraDocument5 pages196R1A0429 CAO Assignment 2 SurendraŚurenđra ŇàťhNo ratings yet
- 8085 MicroprocessorDocument13 pages8085 MicroprocessorDeepak kumarNo ratings yet
- PSO Application To Optimization of AGC in Interconnected Power System With Diverse Sources of Power GenerationDocument14 pagesPSO Application To Optimization of AGC in Interconnected Power System With Diverse Sources of Power GenerationCIVILERGAURAVVERMANo ratings yet
- IOT Mod 5 OverviewDocument5 pagesIOT Mod 5 OverviewShazNo ratings yet
- New Doc 06-May-2023 1.02 PMDocument15 pagesNew Doc 06-May-2023 1.02 PMOM SAWANTNo ratings yet
- WSN GujjuDocument22 pagesWSN GujjuSiddhant SinghaniaNo ratings yet
- Russo 1997Document8 pagesRusso 1997Win WithawintNo ratings yet
- Fgure.: Ce-G) Es)Document8 pagesFgure.: Ce-G) Es)Girindhra A NairNo ratings yet
- MATH101_1stSEM_SHISIR_KHARELDocument178 pagesMATH101_1stSEM_SHISIR_KHARELmjenish99No ratings yet
- IA1 - CI-Syllabus and Practice Questions - Sem4 - 2024Document4 pagesIA1 - CI-Syllabus and Practice Questions - Sem4 - 2024siddharth jainNo ratings yet
- LTE Parameters Commonly Used For OptimizDocument8 pagesLTE Parameters Commonly Used For Optimizأبوعمر الفاروق عبدالرحمنNo ratings yet
- aiml 2Document21 pagesaiml 2abhinav23254No ratings yet
- Intelligent PSO For Fuzzy PID ControlDocument10 pagesIntelligent PSO For Fuzzy PID ControlKệ ThôiNo ratings yet
- Sem 6 PyqDocument20 pagesSem 6 PyqVishesh YadavNo ratings yet
- 26 QamDocument3 pages26 Qamkarthik reddyNo ratings yet
- Esplain Davecira Be Opetated: Microprocesot. DspecyDocument11 pagesEsplain Davecira Be Opetated: Microprocesot. Dspecygurrapu ramyaNo ratings yet
- CSSR and CDR Guideline V1 1Document40 pagesCSSR and CDR Guideline V1 1DavidNo ratings yet
- Feedback Sstem: WalchandDocument8 pagesFeedback Sstem: Walchandsourabh.alase26No ratings yet
- Handwritten Gear NotesDocument11 pagesHandwritten Gear NotesSimphiwe NhlekoNo ratings yet
- CSSR CDR Guideline v1.1Document48 pagesCSSR CDR Guideline v1.1Anonymous k80dHiDfuNo ratings yet
- Flipped Classroom Assignment TOMDocument3 pagesFlipped Classroom Assignment TOMchavanvivek859No ratings yet
- 47_2_018_ElliottDocument15 pages47_2_018_ElliottPiyushSuteNo ratings yet
- SD Lateral Load On 2D FrameDocument10 pagesSD Lateral Load On 2D FrameAniruddh PansambalNo ratings yet
- Adobe Scan 15-Jun-2023Document14 pagesAdobe Scan 15-Jun-2023maneskin488No ratings yet
- Espective: EqvenyDocument9 pagesEspective: EqvenyjamesNo ratings yet
- 8086 Architecture & Pin Description - MPMCDocument19 pages8086 Architecture & Pin Description - MPMCBaishnabi SahuNo ratings yet
- Expt No STGN: Subject Dynamics o MachinerDocument25 pagesExpt No STGN: Subject Dynamics o Machinermohit pandeyNo ratings yet
- Congestion Control 13 Mark QuestionsDocument9 pagesCongestion Control 13 Mark QuestionsKanimozhi LNo ratings yet
- ARM Processor NotesDocument10 pagesARM Processor Notessumithramarimuthu1268No ratings yet
- Osy QB 2Document16 pagesOsy QB 2Pratik BangarNo ratings yet
- Automatic Generation Control For Single Area Power System Using GNA Tuned PID ControllerDocument9 pagesAutomatic Generation Control For Single Area Power System Using GNA Tuned PID ControllerHamsa DeepikaNo ratings yet
- B J K R L: Pole Margin?Document1 pageB J K R L: Pole Margin?Wai-Yen ChanNo ratings yet
- Design FrequencyDocument5 pagesDesign FrequencyGustavo SánchezNo ratings yet
- Standard OFR NATIONAL L13A BDREF Ed1.1 - 24 - JanvierDocument640 pagesStandard OFR NATIONAL L13A BDREF Ed1.1 - 24 - JanvierosmannaNo ratings yet
- Acs 2015s2 Assn1Document5 pagesAcs 2015s2 Assn1MiraelNo ratings yet
- De ShortDocument9 pagesDe Shortsohailmohammad211No ratings yet
- Comparison Agc Pid and Pss AvrDocument11 pagesComparison Agc Pid and Pss Avrtaitan.nguyen95No ratings yet
- Quantum InversionDocument4 pagesQuantum InversionHasnain shabbirNo ratings yet
- Tcscpower PDFDocument7 pagesTcscpower PDFGeniusAtwork2021No ratings yet
- Cloud NotesDocument23 pagesCloud Notessmiley.anupama.143No ratings yet
- BSC212-33C Introduction-OctDocument14 pagesBSC212-33C Introduction-OctDeepak BhattNo ratings yet
- 3G - Huawei Baseline ParametersDocument307 pages3G - Huawei Baseline ParametersanoopreghuNo ratings yet
- Experiment No: 6: D.C. Motor Position Control SystemDocument10 pagesExperiment No: 6: D.C. Motor Position Control SystemMayank ShahabadeeNo ratings yet
- CA ParameterDocument5 pagesCA ParameterMohit BhadauriaNo ratings yet
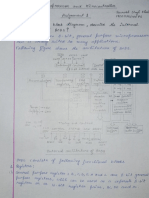
- H The Meat Block Diagomam, Dascodbe Ahe Intenal: Thot Isideally Suitea To Many AfplcotiovsDocument6 pagesH The Meat Block Diagomam, Dascodbe Ahe Intenal: Thot Isideally Suitea To Many AfplcotiovsRishabh Prasad 19GCEBEN074No ratings yet
- COA Assignment 1Document5 pagesCOA Assignment 1Hritik KaulNo ratings yet
- CHP 5Document69 pagesCHP 5million shiferawNo ratings yet
- Exp 1Document5 pagesExp 1HARSHIT SHARMANo ratings yet
- Rule S To Draw Root LocusDocument6 pagesRule S To Draw Root Locussoumyaranjan123456789No ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Classical Approach to Constrained and Unconstrained Molecular DynamicsFrom EverandClassical Approach to Constrained and Unconstrained Molecular DynamicsNo ratings yet
- Mailer PhysicsDocument8 pagesMailer PhysicsArockia RajaNo ratings yet
- Lecture 27 Intro Slipline Field TheoryDocument14 pagesLecture 27 Intro Slipline Field TheoryprasannaNo ratings yet
- ESAB Welding & Cu Ing Products: A515 516 4 In. Thick 2 In. Root GapDocument1 pageESAB Welding & Cu Ing Products: A515 516 4 In. Thick 2 In. Root Gapalok987No ratings yet
- Lewis Structures Resonance and FC 3.23.2019-1Document1 pageLewis Structures Resonance and FC 3.23.2019-1lzljackieNo ratings yet
- Types of Damping 1. Viscous DampingDocument6 pagesTypes of Damping 1. Viscous DampingZandro GagoteNo ratings yet
- An Unreacted Shrinking Core Model For Calcination and Similar Solid To Gas Reactions PDFDocument16 pagesAn Unreacted Shrinking Core Model For Calcination and Similar Solid To Gas Reactions PDFjoseph ayronNo ratings yet
- Newtons Laws F MaDocument12 pagesNewtons Laws F MaMaruli AmbaritaNo ratings yet
- MEC 321 Heat Transfer: Dr. Mohamed Salem ElmnefiDocument14 pagesMEC 321 Heat Transfer: Dr. Mohamed Salem ElmnefiAnonim KopyacıNo ratings yet
- Physical Science Quarter 1 Module 6Document26 pagesPhysical Science Quarter 1 Module 6Luanne Jali-Jali100% (1)
- Recently Developed Heat Pump Assisted Distillation Configurations - A Comparative StudyDocument21 pagesRecently Developed Heat Pump Assisted Distillation Configurations - A Comparative StudyanirudhNo ratings yet
- Dr. Kurin Water FilterDocument2 pagesDr. Kurin Water FilterPatty MorenoNo ratings yet
- Mac 2009Document60 pagesMac 2009Ridwan Pramudya100% (1)
- RelativityDocument9 pagesRelativity0hitk0No ratings yet
- Thermo Problem 5Document5 pagesThermo Problem 5Chirag SoodNo ratings yet
- CP1 June 2018Document5 pagesCP1 June 2018Sifei ZhangNo ratings yet
- EJMA-2008 - Standards of The Expansion Joint Manufacturers Association - 9th Edition PDFDocument238 pagesEJMA-2008 - Standards of The Expansion Joint Manufacturers Association - 9th Edition PDFJMNo ratings yet
- Concrete Permeability and Durability Performance From Theory ToDocument579 pagesConcrete Permeability and Durability Performance From Theory ToMartin Rogić100% (2)
- Key Points: B B B X XDocument5 pagesKey Points: B B B X XSIDDHANT KATARIANo ratings yet
- Making Them Work: Primary-Secondary Chilled Water SystemsDocument9 pagesMaking Them Work: Primary-Secondary Chilled Water Systemspsn_kylmNo ratings yet
- A Project Report On Wavelength of Sodium Light Using Newton's RingsDocument27 pagesA Project Report On Wavelength of Sodium Light Using Newton's RingsAnirudh Mittal100% (1)
- Chaptest BDocument6 pagesChaptest BJun MitsuhashiNo ratings yet
- 086 - 2004 Nov O Level Physics (5052) P1 P2 - Suggested Answers (PDF Library)Document4 pages086 - 2004 Nov O Level Physics (5052) P1 P2 - Suggested Answers (PDF Library)McDonald Whites JonesNo ratings yet
- AF Series - 16 Bar: AF - Aluminium Compressed Air Fi LtersDocument2 pagesAF Series - 16 Bar: AF - Aluminium Compressed Air Fi LtersThane MasureikNo ratings yet
- Cannon: We'Re in The KnowDocument1 pageCannon: We'Re in The KnowSage Shuster-WrightNo ratings yet
- 12 Chemistry FinalDocument24 pages12 Chemistry Finalvenkat gantaNo ratings yet
- 05-06-07 PressureDocument34 pages05-06-07 PressureDiana MoralesNo ratings yet
- AP Chemistry Unit 7 General Equilibrium Free Response Practice OldDocument2 pagesAP Chemistry Unit 7 General Equilibrium Free Response Practice Oldfrenchbunny0709No ratings yet
- Lesson 1-34Document67 pagesLesson 1-34Гулзат ЖалбыроваNo ratings yet
- Understanding Lyophilization Formulation Development: Frank Kofi Bedu-AddoDocument9 pagesUnderstanding Lyophilization Formulation Development: Frank Kofi Bedu-AddoRajeeb Chandra ShahaNo ratings yet