Download as pdf or txt
You might also like
- Contact Analysis On Large Negative Clearance Four-Point Contact Ball BearingDocument5 pagesContact Analysis On Large Negative Clearance Four-Point Contact Ball BearingNabaz MuhamadNo ratings yet
- On The Compression of A CylinderDocument67 pagesOn The Compression of A CylinderfrankNo ratings yet
- Contact Mechanics - Wikipedia The Free EncyclopediaDocument22 pagesContact Mechanics - Wikipedia The Free EncyclopediaJigar ChaudharyNo ratings yet
- Haines, Ollerton - 1963 - Contact Stress Distributions On Elliptical Contact Surfaces Subjected To Radial and Tangential ForcesDocument20 pagesHaines, Ollerton - 1963 - Contact Stress Distributions On Elliptical Contact Surfaces Subjected To Radial and Tangential ForcesJay Srivastava100% (1)
- Chapter 2 FinalDocument26 pagesChapter 2 FinalTamirat NemomsaNo ratings yet
- A ComparisionDocument19 pagesA ComparisionThaiHuynhNgocNo ratings yet
- Term Paper Presentation On: Stress - Strain RelationDocument55 pagesTerm Paper Presentation On: Stress - Strain RelationtaditttiNo ratings yet
- Lect 9Document19 pagesLect 9SAMARTH TIWARINo ratings yet
- PC-FT 403: Lecture (3) byDocument62 pagesPC-FT 403: Lecture (3) byFT 19 Suparno DasNo ratings yet
- Contact Mechanics and Its ModelsDocument17 pagesContact Mechanics and Its ModelsNirmalya MishraNo ratings yet
- MD1 Topic 1 Simple StressesDocument11 pagesMD1 Topic 1 Simple StressesNowellNo ratings yet
- Stick and SlipDocument12 pagesStick and SlipNuring Tyas WicaksonoNo ratings yet
- Research On Crowning Profile To Obtain Maximum Load Carrying Capacity For Roller BearingsDocument6 pagesResearch On Crowning Profile To Obtain Maximum Load Carrying Capacity For Roller BearingskiranmittisilaNo ratings yet
- 3 Kinetic FullDocument6 pages3 Kinetic FullTJPRC PublicationsNo ratings yet
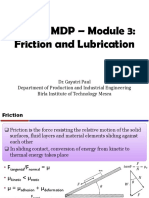
- MDP Module 3Document51 pagesMDP Module 3ADITYA RAJ CHOUDHARYNo ratings yet
- Bearing: A Device That Supports, Guides, and Reduces The Friction of Motion Between Fixed and Moving Machine PartsDocument8 pagesBearing: A Device That Supports, Guides, and Reduces The Friction of Motion Between Fixed and Moving Machine PartsankitsarvaiyaNo ratings yet
- 2020-A Modified Rough Interface Model Considering Shear and Normal Elastic Deformation CouplingsDocument16 pages2020-A Modified Rough Interface Model Considering Shear and Normal Elastic Deformation Couplingssaba shirzadiNo ratings yet
- Torsion TestDocument7 pagesTorsion Testilya danisyahNo ratings yet
- A Review of The Theory of Rolling Contact StressesDocument16 pagesA Review of The Theory of Rolling Contact StressesFinney CharlesNo ratings yet
- RoughnessDocument27 pagesRoughnesssachin bhadangNo ratings yet
- WP Contact Angle What Is It and How Do You Measure ItDocument6 pagesWP Contact Angle What Is It and How Do You Measure ItKholoud Al-AjlouniNo ratings yet
- Colloids AND Surfaces: Abraham MarmurDocument8 pagesColloids AND Surfaces: Abraham MarmurDžana KadrićNo ratings yet
- To Perform The Torsion Test OnDocument8 pagesTo Perform The Torsion Test OnBurhan AhmadNo ratings yet
- Mec 2205: Engineering TribologyDocument42 pagesMec 2205: Engineering TribologyvincentNo ratings yet
- Basic Mechanics of SoilsDocument7 pagesBasic Mechanics of Soilsarabi1No ratings yet
- Stress TransformationDocument7 pagesStress TransformationVignesh WaranNo ratings yet
- Ball Bearing Mechanics: Ni/SaDocument107 pagesBall Bearing Mechanics: Ni/Saarda akkayaNo ratings yet
- Contact MechanicsDocument14 pagesContact Mechanicsalphading100% (2)
- Basic Mechanics of Soils: Analysis of Stress and StrainDocument7 pagesBasic Mechanics of Soils: Analysis of Stress and StrainFátima GouveiaNo ratings yet
- Pptby: ANURAG CHATURVEDI (1714101123) ASHISH KUMAR (1714101021) ASHISH MISHRA (1714101022) SUSHANT KUMAR (1714101109)Document10 pagesPptby: ANURAG CHATURVEDI (1714101123) ASHISH KUMAR (1714101021) ASHISH MISHRA (1714101022) SUSHANT KUMAR (1714101109)AnuragNo ratings yet
- ClutchesDocument12 pagesClutchesAbebaw AyeleNo ratings yet
- MD1 Topic 1 Simple StressesDocument8 pagesMD1 Topic 1 Simple StressesIvan Jeremy AbilaNo ratings yet
- Aircraft Structures Pure TorsionDocument60 pagesAircraft Structures Pure TorsionTarik Hassan ElsonniNo ratings yet
- Chapter 4 - Railway Track StructureDocument50 pagesChapter 4 - Railway Track StructurerobbsNo ratings yet
- Tribology in Design: AssignmentDocument9 pagesTribology in Design: AssignmentSathish SathiNo ratings yet
- Ball Bearing Mechanics: Ni/SaDocument107 pagesBall Bearing Mechanics: Ni/SathisisjineshNo ratings yet
- SOM Course ContentDocument9 pagesSOM Course ContentstudentmgmNo ratings yet
- 3d Printed Composite Body Illustrating Area and Mass Moment of Inertia With Mohr S Circle and Pole MethodDocument17 pages3d Printed Composite Body Illustrating Area and Mass Moment of Inertia With Mohr S Circle and Pole MethodhdahmaniNo ratings yet
- Analysis of The Contacts 2ndDocument26 pagesAnalysis of The Contacts 2ndGurjinder SinghNo ratings yet
- Hertzian ContactDocument5 pagesHertzian ContactGanesh R NavadNo ratings yet
- Analyzing Contact Stresses UsingHertzian Theory - 4Document3 pagesAnalyzing Contact Stresses UsingHertzian Theory - 4caojin259No ratings yet
- Tribology Module-2Document42 pagesTribology Module-2Vyshu SonuNo ratings yet
- Problems of Friction Force Measurement Between Cylindrical Outdoor and Internal Slide PartsDocument7 pagesProblems of Friction Force Measurement Between Cylindrical Outdoor and Internal Slide PartsSaood AliNo ratings yet
- Hertz Contact Stress Theory: NG Han Pei KGY 130024Document15 pagesHertz Contact Stress Theory: NG Han Pei KGY 130024Ng Han PeiNo ratings yet
- Stress NazaryDocument2 pagesStress NazaryMahmood MukhtarNo ratings yet
- Strength of Materials - Mechanics of Materials - MechaniCalcDocument20 pagesStrength of Materials - Mechanics of Materials - MechaniCalcV V DEVADASNo ratings yet
- MEMSDocument71 pagesMEMSSantosh VishnuNo ratings yet
- Chapter 1Document27 pagesChapter 1Omotayo PaulNo ratings yet
- Part2 Emotion2Document37 pagesPart2 Emotion2hohoNo ratings yet
- Tutorial of Hertzian Contact Stress Analysis: Nlecain@optics - Arizona.eduDocument8 pagesTutorial of Hertzian Contact Stress Analysis: Nlecain@optics - Arizona.edugego2No ratings yet
- Solid Mechanics SlidesDocument109 pagesSolid Mechanics SlidesYash TiwariNo ratings yet
- Perpmen: Mech. Math. Them' . Vol. 29, No. 5, Pp. 673-689. 1994Document17 pagesPerpmen: Mech. Math. Them' . Vol. 29, No. 5, Pp. 673-689. 1994Ebru AnaNo ratings yet
- "Friction": AssignmentDocument8 pages"Friction": AssignmentGol HolNo ratings yet
- MMEE 411 Lecture 4 Friction Recap, Wear - EditedDocument45 pagesMMEE 411 Lecture 4 Friction Recap, Wear - EditedDipabloRioNo ratings yet
- Classification of Frictional Contacts. Areas of Contacts and Methods of Its CalculationDocument7 pagesClassification of Frictional Contacts. Areas of Contacts and Methods of Its CalculationAbdulla CamalNo ratings yet
- Mechanics of Materials - Stress Transformation Mechanics of Slender Structures - Boston University PDFDocument8 pagesMechanics of Materials - Stress Transformation Mechanics of Slender Structures - Boston University PDFAbid YusufNo ratings yet
- CE8602-Structural Analysis-II QPDocument31 pagesCE8602-Structural Analysis-II QPsr936879No ratings yet
- Geometry of Surfaces: A Practical Guide for Mechanical EngineersFrom EverandGeometry of Surfaces: A Practical Guide for Mechanical EngineersNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- 42NH Ductable in Room Fan Coil With Multi Speed Motor: Performance Summary For Sobe SpratDocument2 pages42NH Ductable in Room Fan Coil With Multi Speed Motor: Performance Summary For Sobe Spratvelikimag87No ratings yet
- HS PU Elastoseal PrimerDocument2 pagesHS PU Elastoseal PrimergopipcuddaloreNo ratings yet
- Punching Shear LectureDocument94 pagesPunching Shear LectureAshhad ShafiqueNo ratings yet
- LG Ac 2Document8 pagesLG Ac 2Venkatesh SubramanyaNo ratings yet
- Aluminum-Alloy Sand Castings: Standard Specification ForDocument14 pagesAluminum-Alloy Sand Castings: Standard Specification ForAbid HussainNo ratings yet
- How To Build A Screened-In Porch From ScratchDocument6 pagesHow To Build A Screened-In Porch From ScratchRi SovannaphumiNo ratings yet
- Thermodynamic Properties of Liquid Metals PDFDocument7 pagesThermodynamic Properties of Liquid Metals PDFKaren CabezasNo ratings yet
- 574 085 06TS TT Tu TV Application Guide PDFDocument56 pages574 085 06TS TT Tu TV Application Guide PDFMechanical PowerNo ratings yet
- Kepital F20 - 03Document2 pagesKepital F20 - 03Kumaar RanjanNo ratings yet
- Inspection Test Plan ITP Painting WorksDocument4 pagesInspection Test Plan ITP Painting WorksMichael AntipuestoNo ratings yet
- Boundary Layer Velocity ProfileDocument19 pagesBoundary Layer Velocity ProfileSabir Ahmed100% (1)
- ICC Report For Inspection of FRP SystemsDocument7 pagesICC Report For Inspection of FRP SystemsTimbo6808No ratings yet
- Construction Details On Platform FramingDocument6 pagesConstruction Details On Platform FramingMache SebialNo ratings yet
- Failure of High Pressure Ammonia Line in A Fertilizer Plant - A Case StudyDocument9 pagesFailure of High Pressure Ammonia Line in A Fertilizer Plant - A Case StudyblahsomNo ratings yet
- 1 - Heat TreatmentDocument61 pages1 - Heat TreatmentMohamed Karim MohamedNo ratings yet
- Sammys: SSC Hurricane Protection AnchorDocument2 pagesSammys: SSC Hurricane Protection Anchorblessed cccNo ratings yet
- 004 Cat-6040AC CAMP-SIL-BCS4 E-Motor and PowertrainDocument12 pages004 Cat-6040AC CAMP-SIL-BCS4 E-Motor and PowertrainDanilson Benavidez100% (3)
- Installation Manual RecessedDocument40 pagesInstallation Manual RecessedDICEA DANNo ratings yet
- Pyro Bloc ModulesDocument2 pagesPyro Bloc ModulesGurdeep Sungh AroraNo ratings yet
- SuhnerBollardsHandrailsTubeCatalogue FINALDocument20 pagesSuhnerBollardsHandrailsTubeCatalogue FINALLee NagleNo ratings yet
- Metal Can Defects: Table of Contents - Handling DefectsDocument19 pagesMetal Can Defects: Table of Contents - Handling DefectsAdeesha DeshanNo ratings yet
- GGL LucknowDocument525 pagesGGL LucknowPraveen KumarNo ratings yet
- Presentation On Steam TrapsDocument88 pagesPresentation On Steam TrapsSalman Shafique100% (1)
- Failure Analysis of Fifth Wheel Coupling SystemDocument7 pagesFailure Analysis of Fifth Wheel Coupling SystemAndri OdeNo ratings yet
- Foundation DesignDocument15 pagesFoundation Designayazmad100% (1)
- Corrosion Science: Yuqian Zheng, Ying WangDocument16 pagesCorrosion Science: Yuqian Zheng, Ying WangKY PengNo ratings yet
- Branching of Pipes, Pipes in Series or Parallel, Pipe NetworksDocument53 pagesBranching of Pipes, Pipes in Series or Parallel, Pipe NetworksTahir KhanNo ratings yet
- 2029 BM-LAB MANUAL FinalDocument48 pages2029 BM-LAB MANUAL Finalhemant rathodNo ratings yet
- Speciality Pipe and Tube: For Boiler and Petrochemical PlantDocument25 pagesSpeciality Pipe and Tube: For Boiler and Petrochemical PlantdownloadNo ratings yet
- B.O.Q Plumbing - Banquet KitchenDocument11 pagesB.O.Q Plumbing - Banquet KitchenparthivNo ratings yet