Download as pdf or txt
You might also like
- The Aryan BrotherhoodDocument156 pagesThe Aryan BrotherhoodegubiteNo ratings yet
- Graphical Analysis of One Dimensional Motion 4Document23 pagesGraphical Analysis of One Dimensional Motion 4Aditya Pujara0% (1)
- Ga Fluid DynamicsDocument10 pagesGa Fluid DynamicsJames ChapelNo ratings yet
- The Differential Equations of Beam Deflection: Auburn WalkerDocument4 pagesThe Differential Equations of Beam Deflection: Auburn WalkerSai Swaroop GoskiNo ratings yet
- External BallisticsDocument8 pagesExternal BallisticsConexão Terra PlanaNo ratings yet
- Forum: The Vector Function For Distance Travelled in Great Circle NavigationDocument13 pagesForum: The Vector Function For Distance Travelled in Great Circle NavigationVasuNo ratings yet
- Stream FNDocument3 pagesStream FNbrian5412No ratings yet
- BSMaSS 2 16Document8 pagesBSMaSS 2 16محمد الشكريNo ratings yet
- Lecture Notes For Spacetime Geometry and General RelativityDocument33 pagesLecture Notes For Spacetime Geometry and General RelativityRahul CkNo ratings yet
- Second Order Approximation Solution of Nonlinear Large Deflection Problems of Yongjiang Railway Bridge in NingboDocument14 pagesSecond Order Approximation Solution of Nonlinear Large Deflection Problems of Yongjiang Railway Bridge in NingboYork ZengNo ratings yet
- Dynamic Large Deflection ConfDocument13 pagesDynamic Large Deflection ConfMohammed Essam ShatnawiNo ratings yet
- Spinor Darboux Equations of Curves in Euclidean 3-SpaceDocument7 pagesSpinor Darboux Equations of Curves in Euclidean 3-SpaceDon HassNo ratings yet
- Fractal Transport Phenomena Through The Scale Relativity ModelDocument8 pagesFractal Transport Phenomena Through The Scale Relativity ModelOscar RepezNo ratings yet
- Astudy of Spacetimes With Vanishing M - Projective Curvature TensorDocument10 pagesAstudy of Spacetimes With Vanishing M - Projective Curvature TensorVishal MauryaNo ratings yet
- The Completion of Generalized B-Metric Spaces and Fixed PointsDocument19 pagesThe Completion of Generalized B-Metric Spaces and Fixed PointsSafoora ElienNo ratings yet
- Excercise 2 Experimental Estimation of The Moment of Inertia of A Machine Part by Means of The Pendulum MethodDocument5 pagesExcercise 2 Experimental Estimation of The Moment of Inertia of A Machine Part by Means of The Pendulum MethodwswqjisdkNo ratings yet
- Preliminary Static Analysis of Suspension Bridges PDFDocument8 pagesPreliminary Static Analysis of Suspension Bridges PDFp rNo ratings yet
- Preprints201610 0064 v1 PDFDocument10 pagesPreprints201610 0064 v1 PDFSrdjan KitanovicNo ratings yet
- 1 s2.0 S0045782523003857 MainDocument13 pages1 s2.0 S0045782523003857 Mainrohitgaikwad01012000No ratings yet
- Ch. - 5 - DeflectionsDocument5 pagesCh. - 5 - DeflectionsJibril JundiNo ratings yet
- UP11 GRPP RicardoCiprianoDocument16 pagesUP11 GRPP RicardoCiprianoRefugio Rigel Mora LunaNo ratings yet
- Dynamic Modelling of Overhead Crane: G. D. Muscă (Anghelache) and S. NăstacDocument15 pagesDynamic Modelling of Overhead Crane: G. D. Muscă (Anghelache) and S. NăstacRoman MereuțăNo ratings yet
- Método de Área - MomentoDocument14 pagesMétodo de Área - MomentoMassielNo ratings yet
- Sectional Curvature On MathematicaDocument15 pagesSectional Curvature On MathematicaProf. Luis97No ratings yet
- HSSRPTR - Plus One Phy Questions Bank 2023 HssreporterDocument98 pagesHSSRPTR - Plus One Phy Questions Bank 2023 HssreporterShimi BasheerNo ratings yet
- The Brachistochrone Curve: The Problem of Quickest Descent: January 2013Document13 pagesThe Brachistochrone Curve: The Problem of Quickest Descent: January 2013Ryan LamNo ratings yet
- Fleet AngleDocument16 pagesFleet AngleMoses Frank OduoriNo ratings yet
- Is Given by V 3 30 72 - + - Find The Distance Between The Particle's Two Positions of Instantaneous Rest.Document6 pagesIs Given by V 3 30 72 - + - Find The Distance Between The Particle's Two Positions of Instantaneous Rest.Tanzim RahmanNo ratings yet
- Temperature, Hydrostatic Pression and Composition X Effects OnDocument13 pagesTemperature, Hydrostatic Pression and Composition X Effects OnJOSE CARLOS LEON GONZALEZNo ratings yet
- TSP Cmes 37Document10 pagesTSP Cmes 37shashankraomechineniNo ratings yet
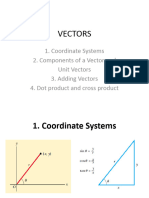
- VECTORSDocument28 pagesVECTORSAhmad Salihu AsmaraNo ratings yet
- Rectangular B Metric SpaceDocument12 pagesRectangular B Metric SpaceDr. Pankaj MishraNo ratings yet
- Revision Worksheet 11 1Document3 pagesRevision Worksheet 11 1ABDUL HADINo ratings yet
- 21 - Paper ModelDocument10 pages21 - Paper ModelJose Luis RomanNo ratings yet
- (2007) - 3D Object Recognition by Eigen Scale Space of Contour - SPDFDocument12 pages(2007) - 3D Object Recognition by Eigen Scale Space of Contour - SPDFcwdaNo ratings yet
- Projectile Motion With Linear FrictionDocument18 pagesProjectile Motion With Linear FrictionDANIEL RICARDO LEAL CHAVEZNo ratings yet
- The Brachistochrone CurveDocument12 pagesThe Brachistochrone CurveVirgilio Jose Cambraia LopesNo ratings yet
- VVV Merged MergedDocument45 pagesVVV Merged Mergedjekeg27327No ratings yet
- Vectors (Tools For Physics) : Chapter 3, Part IDocument14 pagesVectors (Tools For Physics) : Chapter 3, Part IAdian Zahy ArdanaNo ratings yet
- 2018-Turk J Math - Rectifying in E3Document13 pages2018-Turk J Math - Rectifying in E3sanat sethNo ratings yet
- Theoretical Analysis of The No-Slip Boundary Condition Enforcement in SPH MethodsDocument31 pagesTheoretical Analysis of The No-Slip Boundary Condition Enforcement in SPH Methodslynettelmx111No ratings yet
- Hand Pose Recognition Using Curvature Scale SpaceDocument4 pagesHand Pose Recognition Using Curvature Scale SpaceMuthu Vijay DeepakNo ratings yet
- Dual Darboux Frame of A Timelike Ruled Surface and Darboux Approach To Mannheim Offsets of Timelike Ruled SurfacesDocument14 pagesDual Darboux Frame of A Timelike Ruled Surface and Darboux Approach To Mannheim Offsets of Timelike Ruled SurfacesMehmet ÖnderNo ratings yet
- Taxicab Geometry by Osama T. PerballDocument10 pagesTaxicab Geometry by Osama T. PerballTech me BroNo ratings yet
- Artigo Do Leme Agostinho Enviado - 13julhoDocument8 pagesArtigo Do Leme Agostinho Enviado - 13julhoMartim LemeNo ratings yet
- Rectilinear Motion: Sunil Kumar SinghDocument19 pagesRectilinear Motion: Sunil Kumar SinghCinder BayongasanNo ratings yet
- CH 03Document23 pagesCH 03陳凱倫No ratings yet
- Complex of Lascoux in Partition (6,6,3) : Haytham Razooki Hassan, Mays Majid MohammedDocument3 pagesComplex of Lascoux in Partition (6,6,3) : Haytham Razooki Hassan, Mays Majid MohammederpublicationNo ratings yet
- Computer Aided Geometric Design: Michal Bizzarri, Miroslav Lávi Cka, Jan VršekDocument8 pagesComputer Aided Geometric Design: Michal Bizzarri, Miroslav Lávi Cka, Jan VršekMark VoroshekNo ratings yet
- 402Document15 pages402dipeshNo ratings yet
- ICMPT2019 Paper 112Document6 pagesICMPT2019 Paper 112BiswajitRoyNo ratings yet
- Jhepgc 2023011215205379Document10 pagesJhepgc 2023011215205379Daniel Londoño GuzmánNo ratings yet
- KinematicsDocument98 pagesKinematicsSushil DhimanNo ratings yet
- Hsslive Xi Physics Solved QB Based On Deleted Topics 2023 SeemaDocument112 pagesHsslive Xi Physics Solved QB Based On Deleted Topics 2023 Seemaabu326274No ratings yet
- D Reconstruction Based On Homography MappingDocument7 pagesD Reconstruction Based On Homography Mappingbob wuNo ratings yet
- Katsevich General Scheme Published01Document17 pagesKatsevich General Scheme Published01Gilad ShechterNo ratings yet
- Boundary Conditions For 2D Boussinesq-Type Wave-Current Interaction EquationsDocument5 pagesBoundary Conditions For 2D Boussinesq-Type Wave-Current Interaction EquationsFransisca WijayaNo ratings yet
- The Metrical Matrix in Teaching MineralogyDocument12 pagesThe Metrical Matrix in Teaching Mineralogyindependent_mindNo ratings yet
- Practical 1Document5 pagesPractical 1Pratik SinghNo ratings yet
- SSA 3 TrebuchetDocument9 pagesSSA 3 TrebuchetemomNo ratings yet
- Hummer-Bot Instruction ManualDocument108 pagesHummer-Bot Instruction Manualinghdj100% (1)
- History of HockeyDocument11 pagesHistory of HockeyLes LeynesNo ratings yet
- Caneda vs. CADocument3 pagesCaneda vs. CAAnnalie FranciscoNo ratings yet
- Natres Pe Benito MidtermsDocument27 pagesNatres Pe Benito MidtermsJay TabuzoNo ratings yet
- TIA Openness GettingStartedAndDemo V14SP1 enDocument35 pagesTIA Openness GettingStartedAndDemo V14SP1 enjoneschnNo ratings yet
- PracticeDocument10 pagesPracticeRafniel ElizmarNo ratings yet
- Cold Rooms Amp Insulated Panels TSSCDocument32 pagesCold Rooms Amp Insulated Panels TSSCZar KhariNo ratings yet
- Real Solutions ProfileDocument12 pagesReal Solutions ProfileFahad MushtaqNo ratings yet
- Kusudama MeteoroidDocument24 pagesKusudama MeteoroidRaffaela LinetzkyNo ratings yet
- The Old Man and Two GoatsDocument13 pagesThe Old Man and Two GoatshassNo ratings yet
- Scrambled MerchandisingDocument12 pagesScrambled MerchandisingNisha ChauhanNo ratings yet
- EHSPL Msme Reg CertificateDocument1 pageEHSPL Msme Reg Certificatemukherjeemohul25No ratings yet
- Vent-Axia Acoustic Solution Brochure 0Document44 pagesVent-Axia Acoustic Solution Brochure 0Catalin StrugariuNo ratings yet
- Translation Mistakes PDFDocument281 pagesTranslation Mistakes PDFmahaboob88No ratings yet
- 10 Form TestsDocument5 pages10 Form TeststarammasterNo ratings yet
- Tort I Vicarious LiabilityDocument6 pagesTort I Vicarious LiabilityMoureen MosotiNo ratings yet
- PAT 577 Assignment On Diseases of BajraDocument17 pagesPAT 577 Assignment On Diseases of BajraSree Naveena100% (1)
- Doctrina Basica Usaf PDFDocument118 pagesDoctrina Basica Usaf PDFMirko Rodríguez ClaureNo ratings yet
- Izumi: Strong Hero 3 3Document3 pagesIzumi: Strong Hero 3 3cold juneNo ratings yet
- 14 - CH - 06 Friction and Wear Analysis For BushingDocument18 pages14 - CH - 06 Friction and Wear Analysis For BushingSathish KumarNo ratings yet
- MAG 020 - Descrated Host - Transcript Re-FormattedDocument11 pagesMAG 020 - Descrated Host - Transcript Re-FormattedyoniNo ratings yet
- TNPSC History Important QuestionsDocument31 pagesTNPSC History Important QuestionsmegalaNo ratings yet
- Gamingdragon91 ff7 Limits Unlock 2010feb22 PDFDocument2 pagesGamingdragon91 ff7 Limits Unlock 2010feb22 PDFRaden Adri WiratamaNo ratings yet
- TEST2Document40 pagesTEST2Kavitha Suresh KumarNo ratings yet
- The Actor and The Theatre: Week 6 (Part 3) Introduction To Theatre College of The DesertDocument13 pagesThe Actor and The Theatre: Week 6 (Part 3) Introduction To Theatre College of The DesertBradley BesterNo ratings yet
- Sync3 U6 STDocument6 pagesSync3 U6 STAna CondeNo ratings yet
- Earth & Life ScienceDocument14 pagesEarth & Life ScienceYhazmeen Lily LibrodoNo ratings yet
- Fundamentals of Selling Customers For Life Through Service 13th Edition Futrell Solutions ManualDocument36 pagesFundamentals of Selling Customers For Life Through Service 13th Edition Futrell Solutions Manualbasilthoatuis6100% (35)
- Wearable Technologies: Scott Mcgregor President & Ceo, Broadcom CorporationDocument23 pagesWearable Technologies: Scott Mcgregor President & Ceo, Broadcom CorporationRavi PilgarNo ratings yet