Download as pdf or txt
You might also like
- FILE 20190926 173523 eS2008A 5008A SM EN VerB Mark PDFDocument1,016 pagesFILE 20190926 173523 eS2008A 5008A SM EN VerB Mark PDFPham Nguyen Hoang Minh71% (7)
- 1102v-4g EuropaDocument75 pages1102v-4g EuropaΜερκουρηςκαπαNo ratings yet
- 8L90 IntroductionDocument66 pages8L90 IntroductionBrandon100% (6)
- AMPACT Tap ChartDocument2 pagesAMPACT Tap Chartminitaur8100% (2)
- Wiring DiagramDocument100 pagesWiring Diagramirfan100% (8)
- Manual Calisto 2 PDFDocument53 pagesManual Calisto 2 PDFStefan BusoiNo ratings yet
- Aa80e Intergration pt1 PDFDocument9 pagesAa80e Intergration pt1 PDFMothana Husban100% (5)
- DSG TransmissionDocument69 pagesDSG TransmissionOvidiu Bir100% (12)
- A541e Automatic TransaxleDocument132 pagesA541e Automatic TransaxleHuey_7480% (10)
- Auto Trans Overview Cooper SDocument25 pagesAuto Trans Overview Cooper SDiego Fuertes Forero100% (1)
- Catalog Phoenix ContactDocument642 pagesCatalog Phoenix ContactOae FlorinNo ratings yet
- Componentes Do Sistema EletricoDocument14 pagesComponentes Do Sistema Eletricofausto_araxaNo ratings yet
- Electronic Control Module (Power Train)Document8 pagesElectronic Control Module (Power Train)Nyi Lwin KyawNo ratings yet
- Theory of Operation: GeneralDocument38 pagesTheory of Operation: GeneralChristian Bedoya100% (1)
- ReclaimerDocument6 pagesReclaimerMedo MedooNo ratings yet
- 6r140w IntroDocument58 pages6r140w IntroFrank Araya Diaz100% (3)
- Auto Box Description and OperationDocument23 pagesAuto Box Description and Operationhào trầnNo ratings yet
- 2005 FocusDocument8 pages2005 FocusRudi DCNo ratings yet
- Compenentes MayoresDocument5 pagesCompenentes MayoresAlejandro BasilicoNo ratings yet
- A340e PDFDocument118 pagesA340e PDFWawan SatiawanNo ratings yet
- Diesel Lay-Out PDCDocument34 pagesDiesel Lay-Out PDCkr_abhijeet72356587100% (3)
- 16M Motor Grader R9H00001-UP (MACHINE) POWERED BY C13 Engine (SEBP6123 - 84) - CaracterísticasDocument22 pages16M Motor Grader R9H00001-UP (MACHINE) POWERED BY C13 Engine (SEBP6123 - 84) - CaracterísticasDouglas GomesNo ratings yet
- Testing and AdjustingDocument58 pagesTesting and Adjustingrigoberto123456789No ratings yet
- Ijsrdv4i10408 PDFDocument2 pagesIjsrdv4i10408 PDFHáŗï HářäņNo ratings yet
- Electrical Input ComponentsDocument13 pagesElectrical Input ComponentshassanNo ratings yet
- EV-1 Motor Controller Troubleshooting & RepairDocument33 pagesEV-1 Motor Controller Troubleshooting & RepairamineNo ratings yet
- Funcionamieno TransmisionDocument9 pagesFuncionamieno TransmisionOrestes Ram100% (1)
- Automatic Transmission/Transaxle External Controls - Vehicles With: AWF21 6-Speed Automatic TransmissionDocument12 pagesAutomatic Transmission/Transaxle External Controls - Vehicles With: AWF21 6-Speed Automatic Transmissionbelaghmas100% (1)
- 4f27e Parte 1Document5 pages4f27e Parte 1libertyplusNo ratings yet
- Pump Control (Output Flow) - Adjust - Stage 2 PumpDocument5 pagesPump Control (Output Flow) - Adjust - Stage 2 Pumpjorgetpr81No ratings yet
- 5CKMR Service BullitenDocument7 pages5CKMR Service Bullitenchrist6989No ratings yet
- Operation: Mechanical Operation Operating ConditionsDocument5 pagesOperation: Mechanical Operation Operating ConditionsMayobanex Moya MartinezNo ratings yet
- Búsqueda Del Medio - RENR6305 - 994F Wheel Loader Power TrainDocument5 pagesBúsqueda Del Medio - RENR6305 - 994F Wheel Loader Power TrainDavidCPNo ratings yet
- Automatic Manual TransmissionDocument56 pagesAutomatic Manual Transmissionrey1004100% (3)
- English 2001-09-05Document40 pagesEnglish 2001-09-05serdar aydınNo ratings yet
- 4 F 27 e SolenoidsDocument5 pages4 F 27 e Solenoidsseminar1212No ratings yet
- System DiagramDocument19 pagesSystem DiagramDaniel FerreiraNo ratings yet
- ED TM Textbook (20061015)Document25 pagesED TM Textbook (20061015)papipapiiNo ratings yet
- Steering SystemDocument15 pagesSteering SystemRahul KushwahaNo ratings yet
- Auto 4HP16 (0 30)Document31 pagesAuto 4HP16 (0 30)Jose David Huanca Taype67% (3)
- Caterpillar PRELUB Diagnostics (1469) : Cerrar SIS Pantalla AnteriorDocument16 pagesCaterpillar PRELUB Diagnostics (1469) : Cerrar SIS Pantalla Anteriorfabio andres albor del villarNo ratings yet
- d7r Solenide de ControlDocument12 pagesd7r Solenide de ControlDavid Ceron100% (7)
- ZX200 - 270W (2) HitachiDocument7 pagesZX200 - 270W (2) Hitachigalvis1020No ratings yet
- Instruction Manual: Programmable Automatic Shift SystemDocument25 pagesInstruction Manual: Programmable Automatic Shift SystemmarcinNo ratings yet
- The NAG1 (5-Speed) Automatic TransmissionDocument4 pagesThe NAG1 (5-Speed) Automatic TransmissionEdBunge100% (1)
- Electrical Component LocationDocument5 pagesElectrical Component LocationNova kurniawan 34No ratings yet
- 722.6 Diagnostic DataDocument106 pages722.6 Diagnostic Datacorvet94No ratings yet
- Pines EcuDocument7 pagesPines EcuWladimir AmaguañaNo ratings yet
- Repair Manual: Automatic Transmission 01MDocument151 pagesRepair Manual: Automatic Transmission 01MScribdTranslationsNo ratings yet
- Luis Info InglesDocument4 pagesLuis Info InglesFrank Mcgyver Yana CarpioNo ratings yet
- Travão Park T4000Document11 pagesTravão Park T4000Juan Andres Labarca GonzalezNo ratings yet
- Operator InputsDocument7 pagesOperator InputsJACOB MUDONHINo ratings yet
- PC78US-8 Electrical SystemDocument56 pagesPC78US-8 Electrical SystemHai Van100% (4)
- Gen Set Replacement Control Panel MODEL 540: Installation - Operation ManualDocument13 pagesGen Set Replacement Control Panel MODEL 540: Installation - Operation ManualBrianHaze100% (1)
- English 3-Phase Loco BookDocument103 pagesEnglish 3-Phase Loco BookSankati Srinivas100% (5)
- Power Train For 9S W/Loaders: 2018/07/23 - 07/27 Medellin, ColombiaDocument36 pagesPower Train For 9S W/Loaders: 2018/07/23 - 07/27 Medellin, Colombialuis antonio vega parangueo100% (4)
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Aa070mc01 20111130 201210155534Document25 pagesAa070mc01 20111130 201210155534caferNo ratings yet
- 893 Serienschnitt 01Document71 pages893 Serienschnitt 01caferNo ratings yet
- 3TF20006BB400KC0 Datasheet enDocument2 pages3TF20006BB400KC0 Datasheet encaferNo ratings yet
- VB6000TVDocument30 pagesVB6000TVcaferNo ratings yet
- PTC04 DB HALL01 Datasheet MelexisDocument8 pagesPTC04 DB HALL01 Datasheet MelexiscaferNo ratings yet
- Cover Sheet 4 8 1 2 0 2 6 5 8 0 / BDocument43 pagesCover Sheet 4 8 1 2 0 2 6 5 8 0 / BcaferNo ratings yet
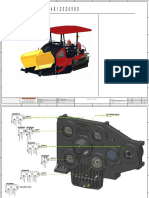
- Parts Catalog: Wheel LoaderDocument21 pagesParts Catalog: Wheel LoadercaferNo ratings yet
- Setup and Operation Manual: Manual No: 577014-350 Revision: DDocument94 pagesSetup and Operation Manual: Manual No: 577014-350 Revision: DcaferNo ratings yet
- Programming Manual: Classiccontroller Cr0033Document336 pagesProgramming Manual: Classiccontroller Cr0033caferNo ratings yet
- Tds-Flare Ultima CA P 80w - 100wDocument2 pagesTds-Flare Ultima CA P 80w - 100wLp BatNo ratings yet
- Structural Parts of The Microscope (Biology)Document4 pagesStructural Parts of The Microscope (Biology)Nemie VelascoNo ratings yet
- Water Source Heat Pump Axiom Horizontal Vertical EXH EXV, DXH DXV PDFDocument228 pagesWater Source Heat Pump Axiom Horizontal Vertical EXH EXV, DXH DXV PDFVirgilio Jr ArtajoNo ratings yet
- Parts List As Per Electric Service TruckDocument3 pagesParts List As Per Electric Service TruckJean Jacques ouandaNo ratings yet
- Cable ScheduleDocument1 pageCable Schedulevinaynagvanshi5No ratings yet
- Specification Cum General Arrangement Drawing Model No.: Srg-1 Reflex Level GaugeDocument1 pageSpecification Cum General Arrangement Drawing Model No.: Srg-1 Reflex Level GaugeHemant NimaseNo ratings yet
- Drager SavinaTechnical Service Bulletin 7Document2 pagesDrager SavinaTechnical Service Bulletin 7Alex CunhaNo ratings yet
- ELTA LightsDocument136 pagesELTA LightsGergely BorbélyNo ratings yet
- CES 410 Programing InfoDocument12 pagesCES 410 Programing InfoRoberto Carlos MárquezNo ratings yet
- MCP and SoundersDocument7 pagesMCP and SoundersgeonikoNo ratings yet
- 7 711e Ed1Document23 pages7 711e Ed1Egyptman JanNo ratings yet
- ICT-scrap BookDocument15 pagesICT-scrap BookJham Ellen DaylusanNo ratings yet
- Fischer Connector CatalogDocument206 pagesFischer Connector CatalogRaguraman Bems - R&DNo ratings yet
- V33037 ManualDocument60 pagesV33037 ManualN DrewNo ratings yet
- Ryobi FlyerDocument4 pagesRyobi FlyerSM CreationNo ratings yet
- Datasheet PV153486 PDFDocument2 pagesDatasheet PV153486 PDFRanti RahmadewiNo ratings yet
- 200 Tem ControlDocument3 pages200 Tem Controlrobson lopes bezerraNo ratings yet
- Booklet Finisher SR3220 (D3B9) Parts CatalogDocument72 pagesBooklet Finisher SR3220 (D3B9) Parts Catalogwilliam lozadaNo ratings yet
- Difference Between MPCB and MCCB - Electrical ClassroomDocument4 pagesDifference Between MPCB and MCCB - Electrical ClassroomNakka Srikanth RajNo ratings yet
- Ciat NA08592B - Powerciat LX R134a 3Document1 pageCiat NA08592B - Powerciat LX R134a 3Lama JTNo ratings yet
- SX12-15-18 (L)Document340 pagesSX12-15-18 (L)Женя СтецьNo ratings yet
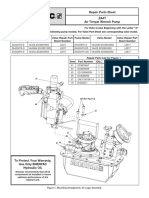
- Enerpac Torque Wrench ManualDocument10 pagesEnerpac Torque Wrench ManualM Saad KhanNo ratings yet
- JAY JAY MILLS LTD - Conduit Fill Calculation PDFDocument2 pagesJAY JAY MILLS LTD - Conduit Fill Calculation PDFpriyangani dmmikaNo ratings yet
- Site InpectionsDocument1 pageSite Inpectionssharoon ahamadNo ratings yet
- 1642EMUX21 IH en Ed03Document50 pages1642EMUX21 IH en Ed03laali303No ratings yet