Download as pdf or txt
You might also like
- Chapter 15Document71 pagesChapter 15Mogaka LucasNo ratings yet
- Acfrogbyi5lhs9vaqjqceu1wljijpi6mj18r99w Pjoneun4p Pleyfxt6u6trao4tieur4bd Iwh0kdd Rf2lne5teoamnspzoubgpvghh1s47j6mfziqntrerm3zsuyzte4ebtxyb1urzemmcDocument2 pagesAcfrogbyi5lhs9vaqjqceu1wljijpi6mj18r99w Pjoneun4p Pleyfxt6u6trao4tieur4bd Iwh0kdd Rf2lne5teoamnspzoubgpvghh1s47j6mfziqntrerm3zsuyzte4ebtxyb1urzemmcSidhant Srichandan SahuNo ratings yet
- Eee52 - Electrical Machines - Ii - Fast Track 2019Document4 pagesEee52 - Electrical Machines - Ii - Fast Track 2019Preethi Sinha100% (2)
- Generator Operation Curve ExplainDocument10 pagesGenerator Operation Curve ExplainThar LayNo ratings yet
- AGN 087 - Power Factor: Application Guidance Notes: Technical Information From Cummins Generator TechnologiesDocument8 pagesAGN 087 - Power Factor: Application Guidance Notes: Technical Information From Cummins Generator TechnologiesariwibowoNo ratings yet
- IDA - QuesbankDocument10 pagesIDA - QuesbankKavitha KaviNo ratings yet
- Questions 1Document11 pagesQuestions 1anvithaNo ratings yet
- Self Excited Induction GeneratorDocument6 pagesSelf Excited Induction Generatorayash mohantyNo ratings yet
- 04 - Improvement of Power FactorDocument29 pages04 - Improvement of Power FactorMohammedAhmadOsamaNo ratings yet
- Serie de Sincronas 2013-2Document5 pagesSerie de Sincronas 2013-2Manuel MartínezNo ratings yet
- ECE 3101 Industrial Electronics: Chopper DrivesDocument17 pagesECE 3101 Industrial Electronics: Chopper Drives17031 Nazmul HasanNo ratings yet
- Question BankDocument5 pagesQuestion BankAASTHA KIETNo ratings yet
- Question Bank of PecDocument4 pagesQuestion Bank of PecSudip SaketNo ratings yet
- Short Questions ECDDocument7 pagesShort Questions ECDNanda Kishore RayNo ratings yet
- Electric-Locomotive SAIDocument30 pagesElectric-Locomotive SAIMy bestie is my enemyNo ratings yet
- Applied Electronics and Electrical MachinesDocument30 pagesApplied Electronics and Electrical MachinesdenNo ratings yet
- Chapter 2 Synchronous MachinesDocument53 pagesChapter 2 Synchronous Machinesayumail100% (1)
- Ac MotorsDocument17 pagesAc MotorsPineappleJamNo ratings yet
- Sheet 1Document3 pagesSheet 1irshad2240% (1)
- ELE3114 Tutorial April 2022Document6 pagesELE3114 Tutorial April 2022Sahiil MauriceNo ratings yet
- C6 Electrical MachinesDocument66 pagesC6 Electrical MachinesAmjad JatoiNo ratings yet
- Kskcet Ee6352-Electrical Engg & Instrm. Year/Sem:Iv/ViiDocument15 pagesKskcet Ee6352-Electrical Engg & Instrm. Year/Sem:Iv/ViimanikandanNo ratings yet
- Notes of CH 2 TractionDocument9 pagesNotes of CH 2 Tractionbagathariya dharaNo ratings yet
- Tutorial 7 Synchronous MachinesDocument2 pagesTutorial 7 Synchronous MachinesSyed Azziz0% (1)
- EET306 Tutorial 3 2018 SolutionDocument11 pagesEET306 Tutorial 3 2018 SolutionShang Divina EbradaNo ratings yet
- Theory Em2 LabDocument2 pagesTheory Em2 Labbalaji1986No ratings yet
- EET 421 Power Electronic Drives: Indra NisjaDocument48 pagesEET 421 Power Electronic Drives: Indra Nisjaaswardi8756No ratings yet
- EEE363 (Exp 5) Study of The Different Loading Conditions of AlternatorDocument5 pagesEEE363 (Exp 5) Study of The Different Loading Conditions of Alternatorsalad.ass420420No ratings yet
- Facts & Power SystemsDocument60 pagesFacts & Power SystemsSree ShobhaNo ratings yet
- Power Factor Correction - Week 5Document35 pagesPower Factor Correction - Week 5Tayyab AhmedNo ratings yet
- Unit 3Document19 pagesUnit 3Monika GNo ratings yet
- Syncronous Machine TUTDocument6 pagesSyncronous Machine TUTClaudioNo ratings yet
- AlternatorsDocument71 pagesAlternatorsnoveas u. eroisaNo ratings yet
- Reactive Power VmanagementDocument6 pagesReactive Power VmanagementKOLANJINATHANNo ratings yet
- Machines Tutorial Sheet #6 (2024) Answer KeysDocument3 pagesMachines Tutorial Sheet #6 (2024) Answer KeysmechanicsstudentNo ratings yet
- E M II: Synchronous MachineDocument10 pagesE M II: Synchronous MachineAkashman ShakyaNo ratings yet
- EEE 321 Marking SchemeDocument8 pagesEEE 321 Marking Schemefaisal sbennaNo ratings yet
- Lecture Notes: Flexible Ac Transmission SystemsDocument65 pagesLecture Notes: Flexible Ac Transmission Systemsprathap kumarNo ratings yet
- An Electrical Motor Consists of A Cylindrical Rotor That Spins Inside A StatorDocument34 pagesAn Electrical Motor Consists of A Cylindrical Rotor That Spins Inside A StatorP.s. PeriasamyNo ratings yet
- MachineDocument13 pagesMachineashu0990% (2)
- Module Name:Electrical Machine I Module Code: Elt213: by AMAHIRWE Jean ClaudeDocument30 pagesModule Name:Electrical Machine I Module Code: Elt213: by AMAHIRWE Jean ClaudeOmar DjazzoNo ratings yet
- Important Question Em2Document4 pagesImportant Question Em2Dinesh PeterNo ratings yet
- Assign#5Document3 pagesAssign#5Zyrose King Agustin TumacderNo ratings yet
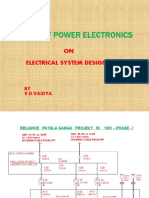
- ON Electrical System Design: BY V.D.VaidyaDocument12 pagesON Electrical System Design: BY V.D.VaidyaGopala VetsaNo ratings yet
- Lecture 3 Power Factor PDSDocument19 pagesLecture 3 Power Factor PDSMuhammad SameerNo ratings yet
- EDCA Module 5Document16 pagesEDCA Module 5Sh PNo ratings yet
- ASSIGNMENT Elektric q1-q3Document16 pagesASSIGNMENT Elektric q1-q3Nur Aisyah ZainuddinNo ratings yet
- EM 2 - Unit 4Document62 pagesEM 2 - Unit 4Black DiamoondNo ratings yet
- 9-12sept2020 DC Motor DONEDocument9 pages9-12sept2020 DC Motor DONEKaushik KunaleNo ratings yet
- EE-260 Lecture 36 Chapter 09Document17 pagesEE-260 Lecture 36 Chapter 09Hamza BashirNo ratings yet
- Group Project Elec Energy Converison 1Document15 pagesGroup Project Elec Energy Converison 1Omar WalidNo ratings yet
- Be3251 Beee QBDocument3 pagesBe3251 Beee QBMr MovieNo ratings yet
- Dcac Final NotesDocument12 pagesDcac Final NotesJulius BoitizonNo ratings yet
- AbstractDocument12 pagesAbstractMantena AravindNo ratings yet
- Eeng 445 Electrical Motors II CatsDocument2 pagesEeng 445 Electrical Motors II CatsMackdonald ShiwaniNo ratings yet
- Exp 3 Machine EEE206Document6 pagesExp 3 Machine EEE206mahmudulNo ratings yet
- 10-Tutorial of Induction MotorDocument48 pages10-Tutorial of Induction Motorrida.hamza.muhammadNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Energy SavingDocument50 pagesEnergy SavingKuna MarndiNo ratings yet
- WolphilinkmanualDocument3 pagesWolphilinkmanualJosé Jaime Herrera CortésNo ratings yet
- Raycap - Corporate Overview - Nov2014 - Telekom BerlinDocument29 pagesRaycap - Corporate Overview - Nov2014 - Telekom BerlinAlejandro Garcia MNo ratings yet
- Ege Ge Egege eDocument8 pagesEge Ge Egege eAjay Kumar PrajapatiNo ratings yet
- MTE - CheckMeter 2.3 Genx English - R06 (06.2016)Document2 pagesMTE - CheckMeter 2.3 Genx English - R06 (06.2016)Genci GjergjaniNo ratings yet
- GHF - S of TT - Non Tech CurriculumDocument12 pagesGHF - S of TT - Non Tech CurriculumDxmplesNo ratings yet
- Tech Spec For DC String CablesDocument6 pagesTech Spec For DC String CablesPaari BNo ratings yet
- Advanced Motion Controls S16A8Document8 pagesAdvanced Motion Controls S16A8Servo2GoNo ratings yet
- 1 CEE, Gulbarga Ceeglb Ceeglb 2 SEE (O), Gulbarga Seeglb SeeglbDocument24 pages1 CEE, Gulbarga Ceeglb Ceeglb 2 SEE (O), Gulbarga Seeglb SeeglbShreenivas SeenuNo ratings yet
- Chapter 8-Differential and Multistage AmplifiersDocument85 pagesChapter 8-Differential and Multistage Amplifiersf94106070No ratings yet
- Chapter7 PDFDocument47 pagesChapter7 PDFCailla ReyesNo ratings yet
- Chint Relays en 0415 PDFDocument13 pagesChint Relays en 0415 PDFMOHSIN_IIUINo ratings yet
- Ee6204 2Document2 pagesEe6204 2V KumarNo ratings yet
- Effect of Field Change, Synchronous Condenser, Starting MethodsDocument30 pagesEffect of Field Change, Synchronous Condenser, Starting Methodsmalik karim dadNo ratings yet
- BG 4-10KW ManualDocument68 pagesBG 4-10KW Manualانعام مىمونNo ratings yet
- FGG45, FGG46, FGG47, FGG45, FGG46, FGG47, FGG48, Fvy53, Fvy54, FGG48, Fvy53, Fvy54, Fvy57, Fvy58 Fvy57, Fvy58Document4 pagesFGG45, FGG46, FGG47, FGG45, FGG46, FGG47, FGG48, Fvy53, Fvy54, FGG48, Fvy53, Fvy54, Fvy57, Fvy58 Fvy57, Fvy58IVY MAE DESUYONo ratings yet
- 5.6B Circuits and Electricity Reading Science BDocument3 pages5.6B Circuits and Electricity Reading Science BGrand Theft Auto0% (1)
- Sony Kdl-22ex355-32ex355-32ex356-40ex455-40ex456 Chassis Az3fk SM Training PDFDocument38 pagesSony Kdl-22ex355-32ex355-32ex356-40ex455-40ex456 Chassis Az3fk SM Training PDFLuis GarciaNo ratings yet
- Digital AutomationsDocument29 pagesDigital AutomationsBeltazor HellboyNo ratings yet
- FlowMeter EDDDocument23 pagesFlowMeter EDDDiego OspinaNo ratings yet
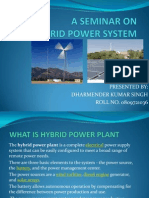
- Hybrid Power SystemDocument31 pagesHybrid Power SystemAnil Kumar67% (9)
- Three Phase Measurement SystemDocument2 pagesThree Phase Measurement SystemHitesh MehtaNo ratings yet
- Carregador de Bateria KRAFTPAKETDocument2 pagesCarregador de Bateria KRAFTPAKETMarco NicoNo ratings yet
- EEN-324 Power ElectronicsDocument15 pagesEEN-324 Power ElectronicsTe NgNo ratings yet
- Raspberry Pi Regulatory Compliance & Safety InformationDocument2 pagesRaspberry Pi Regulatory Compliance & Safety Informationg_ypsumNo ratings yet
- Past Papers All Discos Compiled by MehranDocument155 pagesPast Papers All Discos Compiled by MehranHASSANNo ratings yet
- GORE General Purpose Test Applications AUG2015Document8 pagesGORE General Purpose Test Applications AUG2015Aiman AndroidNo ratings yet
- Technical Specification of Wireless Mic System Shure SLX24 - SM58Document2 pagesTechnical Specification of Wireless Mic System Shure SLX24 - SM58Hazel FongNo ratings yet
- Visual Analysis Essay SampleDocument4 pagesVisual Analysis Essay SamplevdyvfjnbfNo ratings yet
- Canon Ir3100c - Service ManualDocument1,069 pagesCanon Ir3100c - Service ManualSMART REFILL67% (3)