Download as pdf or txt
You might also like
- ARM Microcontrollers Programming for Embedded SystemsFrom EverandARM Microcontrollers Programming for Embedded SystemsRating: 5 out of 5 stars5/5 (1)
- Flash Memories: Detlev RichterDocument287 pagesFlash Memories: Detlev RichterdarNo ratings yet
- Lecture 3Document88 pagesLecture 3Praveen RathnamNo ratings yet
- Lecture 3Document88 pagesLecture 3Hemanth KumarNo ratings yet
- Arm Intro l01Document47 pagesArm Intro l01Tanishq GuptaNo ratings yet
- The ARM Architecture The ARM ArchitectureDocument26 pagesThe ARM Architecture The ARM ArchitecturesudhirNo ratings yet
- ARM Instruction Sets and Program: Jin-Fu Li Department of Electrical Engineering National Central UniversityDocument116 pagesARM Instruction Sets and Program: Jin-Fu Li Department of Electrical Engineering National Central UniversityRANJITHANo ratings yet
- ARM Instr Set PDFDocument116 pagesARM Instr Set PDFnaveenNo ratings yet
- ARM Introduction & Instruction Set ArchitectureDocument71 pagesARM Introduction & Instruction Set Architecturebala100% (1)
- ARM KDocument32 pagesARM KARPAN KUMAR BHANDARINo ratings yet
- Module 4Document82 pagesModule 4Rakesh LodhiNo ratings yet
- 1.evolution and Improvement of ARM ArchitectDocument35 pages1.evolution and Improvement of ARM ArchitectRohini0% (1)
- Embedded Systems ProgrammingDocument28 pagesEmbedded Systems ProgrammingAbdallah AdelNo ratings yet
- l18 ArmDocument71 pagesl18 ArmVamsi SomisettyNo ratings yet
- The First EncounterDocument44 pagesThe First EncounterRANJITHANo ratings yet
- Introduction To Processor Design & The ARM ArchitectureDocument65 pagesIntroduction To Processor Design & The ARM Architectureveer_frnd89100% (1)
- Arm7 ArchitectureDocument20 pagesArm7 ArchitectureCharitha CherryNo ratings yet
- ArmDocument44 pagesArmSiva SankaranNo ratings yet
- 3 ARM ProcessorDocument33 pages3 ARM ProcessorRandell cookNo ratings yet
- ArmDocument203 pagesArmJannathul Firdous MohamedNo ratings yet
- Arm Instruction ProgramDocument121 pagesArm Instruction ProgramErmin KatardzicNo ratings yet
- ARM Introduction & Instruction Set Architecture: Aleksandar MilenkovicDocument31 pagesARM Introduction & Instruction Set Architecture: Aleksandar Milenkovicavireddy1No ratings yet
- Arm PPTDocument25 pagesArm PPTsudarsanareddyNo ratings yet
- ARM Founded in November 1990: Advanced RISC MachinesDocument45 pagesARM Founded in November 1990: Advanced RISC MachinesaesyopNo ratings yet
- ARM OverviewDocument43 pagesARM OverviewSelva KumarNo ratings yet
- 01 - Introduction To ARMDocument32 pages01 - Introduction To ARMRiver AbodNo ratings yet
- The ARM Architecture: AgendaDocument14 pagesThe ARM Architecture: AgendaLala Prieto RiverosNo ratings yet
- ArmDocument43 pagesArmBharavi K SNo ratings yet
- Arm BriefDocument29 pagesArm BriefJoginder YadavNo ratings yet
- ARM ArchitectureDocument85 pagesARM ArchitectureGurram KishoreNo ratings yet
- The ARM Instruction Set: Advanced RISC MachinesDocument58 pagesThe ARM Instruction Set: Advanced RISC MachinesarthicseNo ratings yet
- Arm OverviewDocument43 pagesArm OverviewAngelina HoffmanNo ratings yet
- ARMDocument40 pagesARMhifazat aliNo ratings yet
- ARM7 Processor ArchitectureDocument33 pagesARM7 Processor ArchitectureRamanan MNo ratings yet
- 5-Stage Pipeline CPU HardwareDocument33 pages5-Stage Pipeline CPU HardwarerosestrikesNo ratings yet
- Arm7tdmi-S CpuDocument40 pagesArm7tdmi-S CpuEric JohnathanNo ratings yet
- Arm Exploitation PDFDocument57 pagesArm Exploitation PDFjokllNo ratings yet
- ARM - An Understanding and MoreDocument87 pagesARM - An Understanding and MoreSivasini Netra S ANo ratings yet
- Freescale Cortex.m0.code - DensityDocument66 pagesFreescale Cortex.m0.code - DensitycatgadhaNo ratings yet
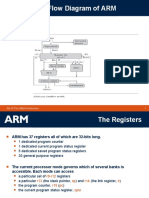
- Data Flow Diagram of ARM: 1 39v10 The ARM ArchitectureDocument7 pagesData Flow Diagram of ARM: 1 39v10 The ARM ArchitectureMohnishNo ratings yet
- Architecture of ARM Processor Family: Seminar On Architectures and Design MethodsDocument27 pagesArchitecture of ARM Processor Family: Seminar On Architectures and Design MethodsSree Harsha VemulapalliNo ratings yet
- ARM: An Advanced MicrocontrollerDocument54 pagesARM: An Advanced MicrocontrollershubhamNo ratings yet
- Thumb InstructionsDocument37 pagesThumb InstructionsSuhas ShirolNo ratings yet
- ARM7,9,11 ProcessorDocument34 pagesARM7,9,11 Processorharshad lokhandeNo ratings yet
- Arm Instruction SetDocument54 pagesArm Instruction SetSundar VadivelanNo ratings yet
- 5-Stage Pipeline CPU HardwareDocument24 pages5-Stage Pipeline CPU HardwareMoksha PatelNo ratings yet
- ES LabManual 2011Document74 pagesES LabManual 2011వంశీ క్రిష్ణNo ratings yet
- Arm-Cortex m3Document13 pagesArm-Cortex m3vinjamurisivaNo ratings yet
- Week 10 PDFDocument83 pagesWeek 10 PDFPoison RemarkNo ratings yet
- ARM ArchitectureDocument26 pagesARM ArchitectureKiran KumarNo ratings yet
- Lec Arm PDFDocument25 pagesLec Arm PDFspaulsNo ratings yet
- 5-Stage Pipeline CPU HardwareDocument43 pages5-Stage Pipeline CPU HardwareMonu ChouhanNo ratings yet
- 32 Bit ARM9 Processor Architecture: Programmers ModelDocument4 pages32 Bit ARM9 Processor Architecture: Programmers ModelVishu GroverNo ratings yet
- 02 ArmDocument53 pages02 ArmBasudha PalNo ratings yet
- CMC ArmDocument79 pagesCMC ArmMujikeer MohammedNo ratings yet
- Tutorials: Introduction To Arm Processors: A Bit of ARM HistoryDocument3 pagesTutorials: Introduction To Arm Processors: A Bit of ARM HistoryMohammed Siyad BNo ratings yet
- Arm7tdmi TheoryDocument51 pagesArm7tdmi TheorymohitNo ratings yet
- ARM Processors (Advanced RISC Machines) : G N V RatnakishorDocument26 pagesARM Processors (Advanced RISC Machines) : G N V RatnakishorbhavanimaddulaNo ratings yet
- Unit IV MPMCDocument22 pagesUnit IV MPMCDeepika SanalaNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- PCV Review GerkeDocument2 pagesPCV Review GerkeAyan AcharyaNo ratings yet
- Challenges in Embedded System Design EDLCDocument7 pagesChallenges in Embedded System Design EDLCAyan AcharyaNo ratings yet
- 8051 Microcontroller ArchitectureDocument28 pages8051 Microcontroller ArchitectureAyan AcharyaNo ratings yet
- Counter ProgrammingDocument26 pagesCounter ProgrammingAyan AcharyaNo ratings yet
- ARM Processor 3Document27 pagesARM Processor 3Ayan AcharyaNo ratings yet
- CAO Set 8Document8 pagesCAO Set 8Vilayat AliNo ratings yet
- Memory Hierarchy Assignment: 1. Exercises A.8, A.9 From Hennessy and Patterson 5th EdDocument8 pagesMemory Hierarchy Assignment: 1. Exercises A.8, A.9 From Hennessy and Patterson 5th EdAnkit KumarNo ratings yet
- JEDEC Standard No. 21 - C Page 3.11.5.1 - 1Document20 pagesJEDEC Standard No. 21 - C Page 3.11.5.1 - 1anandamuraliNo ratings yet
- SSD ListDocument22 pagesSSD ListhidalgocarlosNo ratings yet
- Sharp Arm236 Error Codes Trbl-Arm236 - m237 - m276 - m277Document10 pagesSharp Arm236 Error Codes Trbl-Arm236 - m237 - m276 - m277Imthiyas Ahmed100% (1)
- Mitac 6120N ManualDocument141 pagesMitac 6120N ManualLiviu LiviuNo ratings yet
- COS 318: Operating Systems Virtual Memory Paging: Andy Bavier Computer Science Department Princeton UniversityDocument24 pagesCOS 318: Operating Systems Virtual Memory Paging: Andy Bavier Computer Science Department Princeton UniversityAnkit KomarNo ratings yet
- HX421C14FB2 8Document2 pagesHX421C14FB2 8Mario Fernando Higueras GudiñoNo ratings yet
- Microprocessor 8086Document14 pagesMicroprocessor 8086vshlvvkNo ratings yet
- Fill in The Blanks and True False ComputerDocument3 pagesFill in The Blanks and True False Computerunaas fatimaNo ratings yet
- Pretest: What I KnowDocument18 pagesPretest: What I KnowNelcris TacandongNo ratings yet
- Computer Fundamental S: Name:-Jyoti Priya BATCH NO: - 227Document11 pagesComputer Fundamental S: Name:-Jyoti Priya BATCH NO: - 227Vikash AnandNo ratings yet
- Opcode Operand Meaning Explanation: Example MOV K, LDocument5 pagesOpcode Operand Meaning Explanation: Example MOV K, Lbharat nebhnaniNo ratings yet
- Daam9amb8d0 (Am9a)Document57 pagesDaam9amb8d0 (Am9a)Darcio TolottiNo ratings yet
- Solaris 10 Kernel Solaris 10 Kernel PresentationDocument536 pagesSolaris 10 Kernel Solaris 10 Kernel Presentationكمال ايت حموNo ratings yet
- External ROM and RAM 8051Document59 pagesExternal ROM and RAM 8051nandiniNo ratings yet
- Virtual MemoryDocument7 pagesVirtual Memorydevank1505No ratings yet
- Virtual Memory Systems: 04/16/22 Crowley OS Chap. 12 1Document75 pagesVirtual Memory Systems: 04/16/22 Crowley OS Chap. 12 1navecNo ratings yet
- Version 2 EE IIT, Kharagpur 1Document15 pagesVersion 2 EE IIT, Kharagpur 1ahamed100% (1)
- EMR-3000 Motor Protection Relay Technical Data PDFDocument20 pagesEMR-3000 Motor Protection Relay Technical Data PDFSandhi YudiyantoNo ratings yet
- Sound FXDocument18 pagesSound FXOrcus Dantalian100% (1)
- User Manual Dashcam Pro XDocument16 pagesUser Manual Dashcam Pro Xrahul.shahNo ratings yet
- William Stallings Computer Organization and ArchitectureDocument22 pagesWilliam Stallings Computer Organization and ArchitectureJannat HappyNo ratings yet
- Digital Storage Memory Technology PDFDocument31 pagesDigital Storage Memory Technology PDFManoj Kumar MauryaNo ratings yet
- AT29C040A-p (FLASH)Document17 pagesAT29C040A-p (FLASH)abolfazlNo ratings yet
- Key Difference Between DDR4 and DDR3 RAMDocument4 pagesKey Difference Between DDR4 and DDR3 RAMGopalakrishnan PNo ratings yet
- Chapter 3 - Data Transfer InstructionsDocument68 pagesChapter 3 - Data Transfer InstructionsDawit TesfayeNo ratings yet
- Questions About MicrocontrollerDocument8 pagesQuestions About MicrocontrollernolawitNo ratings yet
- Form 5 & 6 Notes PDFDocument264 pagesForm 5 & 6 Notes PDFYuyun FrancisNo ratings yet