Download as pdf or txt
You might also like
- Fundamentals of Industrial Hygiene 6th Edition Fundamentals of Industrial Hygene - Ey6hdeqDocument2 pagesFundamentals of Industrial Hygiene 6th Edition Fundamentals of Industrial Hygene - Ey6hdeqPavan Kumar Patnaikuni0% (2)
- 2018 HP Prime Programming TutorialDocument67 pages2018 HP Prime Programming Tutorialalexbastos0007100% (3)
- BPMLDocument19 pagesBPMLKalyan Varma TirumalarajuNo ratings yet
- POM - Project ManagementDocument8 pagesPOM - Project ManagementNur SagorNo ratings yet
- For Semaphore Queue Priority Assignment Real-Time Multiprocessor SynchronizationDocument11 pagesFor Semaphore Queue Priority Assignment Real-Time Multiprocessor SynchronizationSourav DasNo ratings yet
- Network PlanningDocument13 pagesNetwork PlanningLeo MarkNo ratings yet
- Unit-24 3 - by Civildatas - Blogspot.inDocument20 pagesUnit-24 3 - by Civildatas - Blogspot.inAbhishek Kumar SinghNo ratings yet
- Session 5 Lecture 6 Part 1 - Line of Balance (Feb 2024)Document28 pagesSession 5 Lecture 6 Part 1 - Line of Balance (Feb 2024)Milena YanNo ratings yet
- Concurrent Computing - WikipediaDocument9 pagesConcurrent Computing - WikipediaRadwan AhmetNo ratings yet
- Time-Resource Tradeoff ProblemDocument7 pagesTime-Resource Tradeoff ProblemsyampkNo ratings yet
- CV4011-PT1 Lecturenote-6-Resource Planning - MGT 1516 S1Document10 pagesCV4011-PT1 Lecturenote-6-Resource Planning - MGT 1516 S1Steven KuaNo ratings yet
- Chapter 5Document11 pagesChapter 5Rekha PawarNo ratings yet
- Resource Allocation For Robust Project SchedulingDocument6 pagesResource Allocation For Robust Project Schedulingsena biçerNo ratings yet
- TarjomeFa F898 EnglishDocument12 pagesTarjomeFa F898 EnglishMohsen GolmohammadiNo ratings yet
- Chapter 4 SEPT 2016Document39 pagesChapter 4 SEPT 2016Danial AzimNo ratings yet
- Cv4201 - Civil Engineering Management Resources Planning & ManagementDocument9 pagesCv4201 - Civil Engineering Management Resources Planning & Managementzzz_monsterNo ratings yet
- Lre-Tl Cited 2Document22 pagesLre-Tl Cited 2vjkant.nNo ratings yet
- Partitioned Real-Time Scheduling For Preventing Information Leakage 221116 131642Document13 pagesPartitioned Real-Time Scheduling For Preventing Information Leakage 221116 131642NIPUN PETKARNo ratings yet
- Timeboxing PDFDocument9 pagesTimeboxing PDFsilas27No ratings yet
- Scheduling Multithread Computations by Stealing WorkDocument28 pagesScheduling Multithread Computations by Stealing Workwmeister31No ratings yet
- Benefits of Critical Chain Project Management CCPMDocument23 pagesBenefits of Critical Chain Project Management CCPMST KnightNo ratings yet
- Using Temporal Checkers For Functional Coverage: Avi Ziv IBM Research Lab in Haifa Haifa University Haifa, 31905 IsraelDocument6 pagesUsing Temporal Checkers For Functional Coverage: Avi Ziv IBM Research Lab in Haifa Haifa University Haifa, 31905 IsraelSamNo ratings yet
- Network Analysis - PPT 1Document35 pagesNetwork Analysis - PPT 1abubakar mohammad saniNo ratings yet
- An Approach For Concurrency ControlDocument5 pagesAn Approach For Concurrency ControlKidusNo ratings yet
- Seppanen 2014 - A Comparison of Takt Time and LBMS Planning MethodsDocument12 pagesSeppanen 2014 - A Comparison of Takt Time and LBMS Planning MethodsMichellgutierrez7833No ratings yet
- A I I E TransactionsDocument5 pagesA I I E TransactionsMateo MojicaNo ratings yet
- Investigating Real-Time Specifications For C#Document8 pagesInvestigating Real-Time Specifications For C#abc123asdNo ratings yet
- AI Planning With Time and Resource Constraints:) Lols'Yrĝindqg5Rpdq%DuwinDocument9 pagesAI Planning With Time and Resource Constraints:) Lols'Yrĝindqg5Rpdq%Duwinabhishek patelNo ratings yet
- Estimate The Capacity of Simple Batch Processes: August 2002Document7 pagesEstimate The Capacity of Simple Batch Processes: August 2002Chemical engineeringNo ratings yet
- Takt Time Grouping Implementing Kanban-Flow ManufacturingDocument16 pagesTakt Time Grouping Implementing Kanban-Flow ManufacturingAr SanNo ratings yet
- Multitasking and Scheduling of Real Time Processes, Some StrategiesDocument61 pagesMultitasking and Scheduling of Real Time Processes, Some StrategiesAbhishek GoyalNo ratings yet
- CB510 Ch4Document14 pagesCB510 Ch4Alsayed DiabNo ratings yet
- Karner - Resource Estimation For Objectory ProjectsDocument9 pagesKarner - Resource Estimation For Objectory Projectsc4i0No ratings yet
- Network Models - Operations ResearchDocument11 pagesNetwork Models - Operations Researchneerubanda100% (1)
- Line-of-Balance TechniqueDocument11 pagesLine-of-Balance TechniqueAnturio PiccasoNo ratings yet
- Cee 5111 - Chapter 3Document49 pagesCee 5111 - Chapter 3Harrison Daka LukwesaNo ratings yet
- SeptemberDocument11 pagesSeptemberGal Neena BaharNo ratings yet
- Critical Chain Scheduling: Page 1 of 10Document10 pagesCritical Chain Scheduling: Page 1 of 10Zulkarnain DahalanNo ratings yet
- Schedule and Budget IMPDocument5 pagesSchedule and Budget IMPraviame09No ratings yet
- 1151ec117 - Eosdd - Unit2 - Question - Bank PDFDocument26 pages1151ec117 - Eosdd - Unit2 - Question - Bank PDFLordwin CecilNo ratings yet
- Se Unit 3 NotesDocument16 pagesSe Unit 3 NotesDivya RajputNo ratings yet
- Linear Programming Based Algorithms For Preemptive and Non-Preemptive RCPSPDocument11 pagesLinear Programming Based Algorithms For Preemptive and Non-Preemptive RCPSPJuan Sebastián Poveda GulfoNo ratings yet
- CPM and PERT-1701Document36 pagesCPM and PERT-1701Refisa JiruNo ratings yet
- Quanti Slide 7 Pert CPMDocument49 pagesQuanti Slide 7 Pert CPMRheanneNo ratings yet
- CPM and Pert Students NotesDocument8 pagesCPM and Pert Students NotesChanchal Rangan100% (1)
- Full Download Operations Management 11th Edition Heizer Solutions ManualDocument36 pagesFull Download Operations Management 11th Edition Heizer Solutions Manualgayoyigachy100% (46)
- Dwnload Full Operations Management 11th Edition Heizer Solutions Manual PDFDocument28 pagesDwnload Full Operations Management 11th Edition Heizer Solutions Manual PDFavosetmercifulmww7100% (18)
- CPM and PERTDocument56 pagesCPM and PERTDhiraj Gandhi100% (1)
- Resource Constrained Project Scheduling Under Uncertainty - A SurveyDocument9 pagesResource Constrained Project Scheduling Under Uncertainty - A SurveyFMagellanNo ratings yet
- Lecture 5Document15 pagesLecture 5husseinoday10No ratings yet
- Priced Timed Automata: Algorithms and Applications: Lecture Notes in Computer Science January 2004Document23 pagesPriced Timed Automata: Algorithms and Applications: Lecture Notes in Computer Science January 2004Far ArfNo ratings yet
- Computational Fluid Dynamics: Práticas de Engenharia Química IvDocument37 pagesComputational Fluid Dynamics: Práticas de Engenharia Química IvPedro SilvaNo ratings yet
- Group ProjectDocument9 pagesGroup ProjectRammyBradNo ratings yet
- CSS11 PriorityinversionDocument11 pagesCSS11 PriorityinversionCeraNo ratings yet
- Project Tools and Evaluation: Topic ListDocument30 pagesProject Tools and Evaluation: Topic ListbinsalweNo ratings yet
- Allocation and Scheduling of Precedence-Related Periodic TasksDocument9 pagesAllocation and Scheduling of Precedence-Related Periodic TasksSWETA DEYNo ratings yet
- Pert & CPMDocument23 pagesPert & CPMGnanasekar ThirugnanamNo ratings yet
- Paper - Heuristic Linear Temporal Logic Pattern Algorithm in Business Process ModelDocument10 pagesPaper - Heuristic Linear Temporal Logic Pattern Algorithm in Business Process ModelKelly Rossa SungkonoNo ratings yet
- Planning & SchedulingDocument29 pagesPlanning & Schedulingfaisal SNo ratings yet
- DCS Paper Jha 2 ColDocument4 pagesDCS Paper Jha 2 ColRamanand JhaNo ratings yet
- Characterizing An Architecture For Intelligent, Reactive AgentsDocument6 pagesCharacterizing An Architecture For Intelligent, Reactive AgentsSukongNo ratings yet
- Multiproject Scheduling 1Document2 pagesMultiproject Scheduling 1Dangi DilleeRamNo ratings yet
- Job Shop Scheduling SecretDocument9 pagesJob Shop Scheduling SecretVladislav Velikov100% (1)
- Drum-Buffer-Rope Shop Floor Control PDFDocument5 pagesDrum-Buffer-Rope Shop Floor Control PDFVladislav VelikovNo ratings yet
- SAP Solution Update Strategy and Road Map For Demand-Driven Material Requirements PlanningDocument39 pagesSAP Solution Update Strategy and Road Map For Demand-Driven Material Requirements PlanningVladislav VelikovNo ratings yet
- Drum-Buffer-Rope: The Technique To Plan and Control The Production Using Theory of ConstraintsDocument4 pagesDrum-Buffer-Rope: The Technique To Plan and Control The Production Using Theory of ConstraintsVladislav VelikovNo ratings yet
- DDMRP AgricultureDocument123 pagesDDMRP AgricultureVladislav VelikovNo ratings yet
- Implementing LeanDocument22 pagesImplementing LeanVladislav Velikov100% (1)
- Manage BrochureDocument4 pagesManage BrochureVladislav VelikovNo ratings yet
- Bi Outsourcing 1Document12 pagesBi Outsourcing 1Vladislav VelikovNo ratings yet
- G103 User Guide V2.3-Mobicom Telematics PDFDocument13 pagesG103 User Guide V2.3-Mobicom Telematics PDFJeson ZhuNo ratings yet
- Bits For Mid2Document14 pagesBits For Mid2Vamsinath JavangulaNo ratings yet
- Https Raw - Githubusercontent.com Joelgrus Data-Science-From-Scratch Master Code Working With DataDocument7 pagesHttps Raw - Githubusercontent.com Joelgrus Data-Science-From-Scratch Master Code Working With DatagprasadatvuNo ratings yet
- AAI1 06 KNNDocument39 pagesAAI1 06 KNNjNo ratings yet
- The Box Jenkins Using Minitab 3Document46 pagesThe Box Jenkins Using Minitab 3sweetNo ratings yet
- INtroductionDocument2 pagesINtroductionPETERNo ratings yet
- Lso ConfigurationDocument4 pagesLso ConfigurationFactsNTipsNo ratings yet
- IR Remote Control Decoder Using Arduino - IR Remote DecoderDocument15 pagesIR Remote Control Decoder Using Arduino - IR Remote Decoderحارث اكرمNo ratings yet
- ReadmeDocument10 pagesReadmeHarshit SyalNo ratings yet
- WWW Scribd Com Document 381463631 Ha12i Australie 0400Document20 pagesWWW Scribd Com Document 381463631 Ha12i Australie 0400Attila GaálNo ratings yet
- Reset Catrid Hp21 - 22Document1 pageReset Catrid Hp21 - 22mas_husnan0% (1)
- College Algebra: 10 EditionDocument18 pagesCollege Algebra: 10 EditionAstroNo ratings yet
- The Unified Modeling LanguageDocument7 pagesThe Unified Modeling LanguageA SenthilkumarNo ratings yet
- Project On Maruti SuzukiDocument19 pagesProject On Maruti SuzukiRam KrishnaNo ratings yet
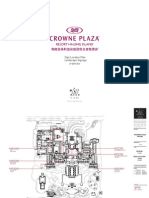
- (2012!05!07) Landscape SignageDocument26 pages(2012!05!07) Landscape SignageAdam V. ArzateNo ratings yet
- Centronics Data SheetsDocument31 pagesCentronics Data SheetsEd PalmerNo ratings yet
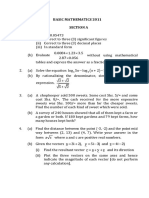
- Basic Mathematics 2011-QNDocument5 pagesBasic Mathematics 2011-QNEmanuel John BangoNo ratings yet
- How To Build An Agile Release in 15 MinutesDocument10 pagesHow To Build An Agile Release in 15 MinutesStan VermeulenNo ratings yet
- Cloudera IntroductionDocument93 pagesCloudera IntroductionjherrerocNo ratings yet
- CRT 06 PDFDocument8 pagesCRT 06 PDFdovdorNo ratings yet
- Applet GRDocument36 pagesApplet GRNadisha FathimaNo ratings yet
- Sap S/4Hana Embedded Analytics: An OverviewDocument13 pagesSap S/4Hana Embedded Analytics: An OverviewVeera Babu TNo ratings yet
- Class - 3 Computer Text BookDocument46 pagesClass - 3 Computer Text BookSandeep MazumdarNo ratings yet
- TLM-2 0 1Document8 pagesTLM-2 0 1Frankie LiuNo ratings yet
- QXXXDocument2 pagesQXXXsscript14No ratings yet
- DocuSign User GuideDocument6 pagesDocuSign User GuideEdward Barksdale100% (1)
- Association Analysis (DMDW)Document16 pagesAssociation Analysis (DMDW)bhargaviNo ratings yet