Download as pdf or txt
You might also like
- Term 1 Controlled Test GR 12 MathematicsDocument9 pagesTerm 1 Controlled Test GR 12 MathematicsMichael AkintolaNo ratings yet
- 2018 Singapore-Cambridge A Level H2 Chemistry P3 Suggested Answer Key (9729)Document19 pages2018 Singapore-Cambridge A Level H2 Chemistry P3 Suggested Answer Key (9729)howieNo ratings yet
- B.Dasgupta Solutions PDFDocument56 pagesB.Dasgupta Solutions PDFAkshat RastogiNo ratings yet
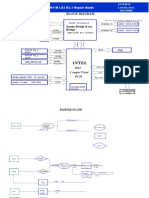
- Block Diagram: P8H61-M LX3 R2.1 Repair GuideDocument6 pagesBlock Diagram: P8H61-M LX3 R2.1 Repair GuideAdi copycenterNo ratings yet
- Voltaic Cell Lab ReportDocument5 pagesVoltaic Cell Lab Reporthelia bazarganNo ratings yet
- KIP 7100 Service Manual Ver A - 1Document675 pagesKIP 7100 Service Manual Ver A - 1Rich RodNo ratings yet
- Append17Dec2k8 PDFDocument56 pagesAppend17Dec2k8 PDFAkshat RastogiNo ratings yet
- Week 8 Assignment and SolutionsDocument7 pagesWeek 8 Assignment and SolutionsG. Dancer GhNo ratings yet
- A6 SolutionDocument8 pagesA6 SolutionRaja KumarNo ratings yet
- Ss 1 Further Mathematics Lesson 5Document3 pagesSs 1 Further Mathematics Lesson 5Adio Babatunde Abiodun CabaxNo ratings yet
- Math 101 ReviewDocument17 pagesMath 101 Reviewxw5xNo ratings yet
- Spectral Partitioning: One Way To Slice A Problem in HalfDocument23 pagesSpectral Partitioning: One Way To Slice A Problem in HalfWeb devNo ratings yet
- COE1 2018 Re ExamDocument2 pagesCOE1 2018 Re Examarrepio cosmicoNo ratings yet
- HW 5 SolDocument10 pagesHW 5 SolPedroNo ratings yet
- 3 ErrataDocument4 pages3 ErrataPJBNo ratings yet
- Homework3 Sol PDFDocument8 pagesHomework3 Sol PDFMena AwanNo ratings yet
- Ex 1.10 (A)Document7 pagesEx 1.10 (A)João SenaNo ratings yet
- Fractional-Step Tow-Thomas Biquad Filters: Nolta, IeiceDocument18 pagesFractional-Step Tow-Thomas Biquad Filters: Nolta, Ieice蓝蓝のDoraemonNo ratings yet
- Sample Exam 1Document2 pagesSample Exam 1Kerry SunNo ratings yet
- Maths Class 12 BoardDocument10 pagesMaths Class 12 Boardallivyakaur13No ratings yet
- ME321A Lab: Experimental Stress Analysis Experiment No.4: PhotoelasticityDocument3 pagesME321A Lab: Experimental Stress Analysis Experiment No.4: Photoelasticityrahul kumarrNo ratings yet
- ME321A Lab: Experimental Stress Analysis Experiment No.4: PhotoelasticityDocument3 pagesME321A Lab: Experimental Stress Analysis Experiment No.4: PhotoelasticityPYNo ratings yet
- Frequency Response (Report)Document19 pagesFrequency Response (Report)Mahmoud KassabNo ratings yet
- 1 Minimum Cut ProblemDocument6 pages1 Minimum Cut ProblemabhishekNo ratings yet
- PartitioningDocument23 pagesPartitioningabhishekNo ratings yet
- SMPC - VRamnarayanan 173 174Document2 pagesSMPC - VRamnarayanan 173 174GIRINITH RNo ratings yet
- Sheet 11 SolutionsDocument6 pagesSheet 11 SolutionsMehul PatilNo ratings yet
- DPP (10-12) 11th J-Batch MathsDocument7 pagesDPP (10-12) 11th J-Batch MathsRaju SinghNo ratings yet
- Four Write Answers in This Quest Paper Itself, Start A New Page For Each QuestionDocument26 pagesFour Write Answers in This Quest Paper Itself, Start A New Page For Each QuestionDebjit KanrarNo ratings yet
- Robotics1 12.01.11Document8 pagesRobotics1 12.01.11asalifew belachewNo ratings yet
- 100cia Tec 2020Document9 pages100cia Tec 2020fernandoNo ratings yet
- 2017 Spring Mid1 (詳解) -1Document12 pages2017 Spring Mid1 (詳解) -1yulin linNo ratings yet
- PPNCKHDocument12 pagesPPNCKHtamvothitam4No ratings yet
- Extension of Beta FunctionDocument6 pagesExtension of Beta FunctionHaroon RashidNo ratings yet
- Signals and Systems Laboratory 7Document9 pagesSignals and Systems Laboratory 7Kthiha CnNo ratings yet
- SC617 EndtermDocument5 pagesSC617 EndtermHarshil NaikNo ratings yet
- MathsDocument10 pagesMathsVrushaliNo ratings yet
- Chapter 2: Quadratic ProgrammingDocument16 pagesChapter 2: Quadratic ProgrammingcartamenesNo ratings yet
- Well Balanced CU SchemeDocument41 pagesWell Balanced CU SchemeShubhash MeenaNo ratings yet
- The DC Power Flow EquationsDocument22 pagesThe DC Power Flow EquationsPeter JumreNo ratings yet
- Ejercicios NyquistDocument13 pagesEjercicios Nyquistpepe gomezNo ratings yet
- Ps6sol v2 PDFDocument13 pagesPs6sol v2 PDFRahuldev MuraleedharanNo ratings yet
- Asymptotic Formulas For Two Continued Fractions in Ramanujan's Lost NotebookDocument17 pagesAsymptotic Formulas For Two Continued Fractions in Ramanujan's Lost Notebookapi-26401608No ratings yet
- 10.1216@RMJ 2017 47 8 2723Document8 pages10.1216@RMJ 2017 47 8 2723Mircea MercaNo ratings yet
- Vector Algebra Exempler PDFDocument16 pagesVector Algebra Exempler PDFamiNo ratings yet
- MHT CET-FT-2 Maths (Only Solutions)Document7 pagesMHT CET-FT-2 Maths (Only Solutions)sssuchirNo ratings yet
- MS Set 08Document10 pagesMS Set 08MUHAMMAD MOMINNo ratings yet
- CBSE Class 10 Maths Solution PDF 2016 Set 1 PDFDocument7 pagesCBSE Class 10 Maths Solution PDF 2016 Set 1 PDFmeowNo ratings yet
- Presentation Math Coordinate GeometryDocument71 pagesPresentation Math Coordinate Geometryonemastura209380% (5)
- Scalar Plane HandoutDocument3 pagesScalar Plane HandoutIdkNo ratings yet
- Gram Schmidt Orthogonalization 100 YearsDocument41 pagesGram Schmidt Orthogonalization 100 YearsBilal AlderbashiNo ratings yet
- 19.0 Equations and Constants: H T H H H TDocument10 pages19.0 Equations and Constants: H T H H H TAakash ChopraNo ratings yet
- Depicting Qudit Quantum Mechanics and Mutually Unbiased Qudit TheoriesDocument24 pagesDepicting Qudit Quantum Mechanics and Mutually Unbiased Qudit TheoriesGrâce Dorcas Akpéné AMOUZOUNo ratings yet
- FUee10 Petar01Document10 pagesFUee10 Petar01Стефан ПанићNo ratings yet
- The DC Power Flow EquationsDocument25 pagesThe DC Power Flow EquationsDaryAntoNo ratings yet
- ME 380 Chapter 2 HW Solution: Review QuestionsDocument5 pagesME 380 Chapter 2 HW Solution: Review QuestionsVisakan ParameswaranNo ratings yet
- 1468564124EText (CH 9, M 4Document9 pages1468564124EText (CH 9, M 4varshiNo ratings yet
- Rmfe20 - 2 - 020213Document6 pagesRmfe20 - 2 - 020213Martinez Galindo Axel MiguelNo ratings yet
- CMSC 451: Lecture 13 All-Pairs Shortest Paths and The Floyd-Warshall AlgorithmDocument5 pagesCMSC 451: Lecture 13 All-Pairs Shortest Paths and The Floyd-Warshall AlgorithmAnthony-Dimitri ANo ratings yet
- Module 3 - Solutions of The Diffusivity EquationDocument13 pagesModule 3 - Solutions of The Diffusivity EquationMuhammad Umair AliNo ratings yet
- Maths Advanced Level Problem Solving (ALPS-9) - SolutionDocument13 pagesMaths Advanced Level Problem Solving (ALPS-9) - SolutionIshan AgnohotriNo ratings yet
- SSD Assignment 1Document18 pagesSSD Assignment 1sivaNo ratings yet
- Full Download Engineering Electromagnetics 8th Edition Hayt Solutions ManualDocument35 pagesFull Download Engineering Electromagnetics 8th Edition Hayt Solutions Manualteddylanese918100% (47)
- Netflix+Cookies+07+-+Www Cookies ga+Updated+27+December+2022Document2 pagesNetflix+Cookies+07+-+Www Cookies ga+Updated+27+December+2022Ammar BendjeddouNo ratings yet
- Robotics1 Homework1!11!12Document14 pagesRobotics1 Homework1!11!12Ammar BendjeddouNo ratings yet
- Robotics1 Homework2!10!11Document8 pagesRobotics1 Homework2!10!11Ammar BendjeddouNo ratings yet
- Robotics1 11.02.03Document4 pagesRobotics1 11.02.03Ammar BendjeddouNo ratings yet
- Specification EhDocument8 pagesSpecification Ehthanh thien nguyenNo ratings yet
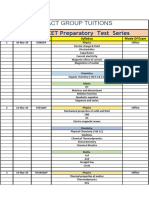
- JEE & MT-CET Preparatory Test Series 2024Document3 pagesJEE & MT-CET Preparatory Test Series 2024aryankatakdhond.2410No ratings yet
- Heatless Desiccant Compressed Air Dryer: Models Tw10 - Tw55Document20 pagesHeatless Desiccant Compressed Air Dryer: Models Tw10 - Tw55Freddy ChecaNo ratings yet
- Waterflooding Simulation PDF - 1670747952661Document76 pagesWaterflooding Simulation PDF - 1670747952661Mohamed MamdouhNo ratings yet
- Baumueller Disc Motors 202212 - enDocument44 pagesBaumueller Disc Motors 202212 - enRodrigo SimairNo ratings yet
- Electric Boilers: Vapor PowerDocument5 pagesElectric Boilers: Vapor PowerRebecca TerryNo ratings yet
- MOTOR SOFT STARTERS - Air Core ReactorsDocument3 pagesMOTOR SOFT STARTERS - Air Core Reactorsmv_mallikNo ratings yet
- R.ramirez Producing Uniform Illumination Within A Rectangular Area by Using A Novel Non Imaging OpticDocument9 pagesR.ramirez Producing Uniform Illumination Within A Rectangular Area by Using A Novel Non Imaging OpticGörkem VarolNo ratings yet
- Water Tank - Is 3370-Mbbr Tank - 1 & 2Document4 pagesWater Tank - Is 3370-Mbbr Tank - 1 & 2Dhayalan PalanisamyNo ratings yet
- 14 Munoz Perez SP, Salazar Pretel TM, Villena Zapata LI PDFDocument11 pages14 Munoz Perez SP, Salazar Pretel TM, Villena Zapata LI PDFrita cristina holguin romeroNo ratings yet
- Collision TheoryDocument5 pagesCollision TheoryAngel PobleteNo ratings yet
- A Simplified Dynamic Model For Front-End Loader Design: M D WorleyDocument19 pagesA Simplified Dynamic Model For Front-End Loader Design: M D WorleyKevinCollenNo ratings yet
- Internal Combustion Engines: Air University IslamabadDocument56 pagesInternal Combustion Engines: Air University IslamabadHafiz Muhammad Khawar HussainNo ratings yet
- Annex Form J2 D1.1 D1.1M 2020Document3 pagesAnnex Form J2 D1.1 D1.1M 2020Wegig WijanaNo ratings yet
- Elastic Potential Energy: English For PhysicsDocument2 pagesElastic Potential Energy: English For Physicshaura 30anNo ratings yet
- 220kv Phu Tho v6Document712 pages220kv Phu Tho v6Thanh Tâm100% (1)
- 2013-Carbanions and CationsDocument109 pages2013-Carbanions and CationsYoel FriedmanNo ratings yet
- Chapter 5Document39 pagesChapter 5Pink FloydaNo ratings yet
- Electro Chemistry - Ex 1Document15 pagesElectro Chemistry - Ex 1Mohd AdilNo ratings yet
- Technologies For Thermal Protection Systems Applied-1Document8 pagesTechnologies For Thermal Protection Systems Applied-1kathirNo ratings yet
- Tesis Corrosion, Codigos PhreeqcDocument97 pagesTesis Corrosion, Codigos PhreeqcDemigodNo ratings yet
- Kollmorgen AKM - ServomotorDocument44 pagesKollmorgen AKM - ServomotorMiguel GonzalezNo ratings yet
- Detail Design of Bridge Abutment 1Document4 pagesDetail Design of Bridge Abutment 1mohammad azimNo ratings yet
- Esas Preboard ObjectivesDocument7 pagesEsas Preboard ObjectivesRandy RandyNo ratings yet
- Lift, Escalator and Passenger ConveyorDocument139 pagesLift, Escalator and Passenger ConveyorHirwan SyahputraNo ratings yet
- Carnot Cycle: Isothermal Expansion Att Adiabatic Expansion From T TotDocument3 pagesCarnot Cycle: Isothermal Expansion Att Adiabatic Expansion From T TotHyeon Chang NoNo ratings yet