Download as pdf or txt
You might also like
- THYSSENKRUPP Optimized Crusher Selection For The Cement IndustryDocument9 pagesTHYSSENKRUPP Optimized Crusher Selection For The Cement IndustryAngshuman Dutta100% (1)
- Full Download PDF of Solutions Manual For Engineering Vibration 4th by Inman 0132871696 All ChapterDocument47 pagesFull Download PDF of Solutions Manual For Engineering Vibration 4th by Inman 0132871696 All Chapternosindejwak100% (5)
- Full Solutions Manual For Engineering Vibration 4Th by Inman 0132871696 PDF Docx Full Chapter ChapterDocument36 pagesFull Solutions Manual For Engineering Vibration 4Th by Inman 0132871696 PDF Docx Full Chapter Chaptercrawlhoggery7htt100% (23)
- Full Download Solutions Manual For Engineering Vibration 4th by Inman 0132871696 PDF Full ChapterDocument36 pagesFull Download Solutions Manual For Engineering Vibration 4th by Inman 0132871696 PDF Full Chapterpolelessfeck8avz100% (21)
- Systems of Particles: Example 1: Linear Momentum and Conservation of Energy, Example 2: Angular MomentumDocument8 pagesSystems of Particles: Example 1: Linear Momentum and Conservation of Energy, Example 2: Angular MomentumADAM WUMBILANo ratings yet
- Gantry CraneDocument8 pagesGantry Craneee23m102No ratings yet
- A Short Report On MATLAB Implementation of The Girsanov Transformation For Reliability AnalysisDocument8 pagesA Short Report On MATLAB Implementation of The Girsanov Transformation For Reliability AnalysisYoung EngineerNo ratings yet
- Comparitive Nalysis Work For Free and Forced VibrationsDocument4 pagesComparitive Nalysis Work For Free and Forced VibrationsVAIDEHI SHARMANo ratings yet
- Paper - Important SamplingDocument32 pagesPaper - Important Sampling劉軒宇No ratings yet
- Simple Harmonic Motion: 8.01 Week 12D1Document23 pagesSimple Harmonic Motion: 8.01 Week 12D1Deepak AwasthiNo ratings yet
- Assignment - 2 - Updated Solution - ME354ADocument13 pagesAssignment - 2 - Updated Solution - ME354Adagani ranisamyukthaNo ratings yet
- 13 NaturallyFracturedReservoirs SolutionsDocument8 pages13 NaturallyFracturedReservoirs SolutionsSohaibSeidNo ratings yet
- Econ Boot Camps MMDocument6 pagesEcon Boot Camps MMDiogo LimaNo ratings yet
- ML, WK 04-Questions With AnswersDocument4 pagesML, WK 04-Questions With AnswersravinyseNo ratings yet
- Mukhi StringtheoryDocument196 pagesMukhi Stringtheoryanirbaan42k1No ratings yet
- Lecture 3 System ModelingDocument16 pagesLecture 3 System Modelinganon_412646200No ratings yet
- Seminar Report On LFD PDFDocument26 pagesSeminar Report On LFD PDFSUDEEP SAHANo ratings yet
- Slides.2.dynamics Lund 2017 Tomasi PDFDocument22 pagesSlides.2.dynamics Lund 2017 Tomasi PDFAnil KumarNo ratings yet
- Hasbun PosterDocument21 pagesHasbun PosterSuhailUmarNo ratings yet
- Coeficientes de InfluenciaDocument100 pagesCoeficientes de InfluenciaRicardo ColosimoNo ratings yet
- Damped Vibration: Viscous and Coulomb DampingDocument14 pagesDamped Vibration: Viscous and Coulomb DampingEmmanuel KutaniNo ratings yet
- Inverted Pendulum With Obstacles DynamicsDocument3 pagesInverted Pendulum With Obstacles DynamicsoptimisticNo ratings yet
- Lecture 2 - Modelling of Mechanical Systems - Part A: Last TimeDocument8 pagesLecture 2 - Modelling of Mechanical Systems - Part A: Last TimeLE NgocNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- Ex 16Document5 pagesEx 16tijsbakkerNo ratings yet
- A Model of Neuromuscular Reflex Motion: Limb DynamicsDocument5 pagesA Model of Neuromuscular Reflex Motion: Limb DynamicsAl RaNo ratings yet
- Vib23 Module 5Document9 pagesVib23 Module 5Rouaa khaledNo ratings yet
- Integral Transforms For Heat and Fluid Flow in Two-And Three-Dimensional Porous MediaDocument11 pagesIntegral Transforms For Heat and Fluid Flow in Two-And Three-Dimensional Porous MediaHà Đăng ToànNo ratings yet
- ME237 Project Nonlinear Control of A Cart Pendulum System: Yizhou WangDocument23 pagesME237 Project Nonlinear Control of A Cart Pendulum System: Yizhou WangOhiNo ratings yet
- Lecture Notes For PHY 405 Classical MechanicsDocument14 pagesLecture Notes For PHY 405 Classical MechanicsAbhay BhattaraiNo ratings yet
- 13 Aos1172Document28 pages13 Aos1172HanningSuNo ratings yet
- Vibration Lectures Part 1Document71 pagesVibration Lectures Part 1AshokNo ratings yet
- Distributed Lag ModelsDocument9 pagesDistributed Lag Modelshimanshumalik.du.or.25No ratings yet
- Blanchard Kahn (1980)Document8 pagesBlanchard Kahn (1980)Luis Antonio La Torre QuinteroNo ratings yet
- Chapter-1: Introduction To Dynamics Mechanics As The Origin of DynamicsDocument92 pagesChapter-1: Introduction To Dynamics Mechanics As The Origin of DynamicsRoutine Of Nepal BandaNo ratings yet
- Fouque Tutorial1Document81 pagesFouque Tutorial1g5v7rm5spmNo ratings yet
- Levy 1215 Bfs Theme CarrDocument31 pagesLevy 1215 Bfs Theme CarrmsgwritingNo ratings yet
- Problem Set1 SolnsDocument3 pagesProblem Set1 SolnsIpsita MandalNo ratings yet
- 03 - Seismic Input PDFDocument31 pages03 - Seismic Input PDFHerman AucampNo ratings yet
- Linear-Quadratic Control: Jenny Hong Nicholas Moehle Stephen Boyd EE103 Stanford UniversityDocument34 pagesLinear-Quadratic Control: Jenny Hong Nicholas Moehle Stephen Boyd EE103 Stanford UniversityAkshay PampatwarNo ratings yet
- Advection Diffusion Instantaneous ReleaseDocument9 pagesAdvection Diffusion Instantaneous ReleaseRoshanNo ratings yet
- Dinamika StrukturDocument25 pagesDinamika StrukturErik Wahyu PradanaNo ratings yet
- Chap 6Document40 pagesChap 6pranjal meshramNo ratings yet
- Hydro-Dynamic Characteristics of An Underwater Towed Body Using CFD AnalysisDocument13 pagesHydro-Dynamic Characteristics of An Underwater Towed Body Using CFD AnalysisMoses Jomike Michael RajagiriNo ratings yet
- Formula Sheet CompreDocument2 pagesFormula Sheet Compref20230406No ratings yet
- Week 7 LectureDocument54 pagesWeek 7 LectureHANJING QUANNo ratings yet
- Diff Eq FormulasDocument10 pagesDiff Eq Formulasroi_marketingNo ratings yet
- The Solution of Linear Difference Models Under Rational ExpectationDocument8 pagesThe Solution of Linear Difference Models Under Rational Expectation穆伯扬No ratings yet
- Axioms 09 00045Document21 pagesAxioms 09 00045Anh Khôi PhạmNo ratings yet
- 5forced Motion Response of DampedDocument5 pages5forced Motion Response of DampedMohammad ZobeidiNo ratings yet
- Smile Dynamics 3Document12 pagesSmile Dynamics 3broletmedownloaditNo ratings yet
- A Watef 2017Document5 pagesA Watef 2017José Luis VarelaNo ratings yet
- Position Servo MechanismDocument4 pagesPosition Servo MechanismVenkatesan SundaramNo ratings yet
- CH 1. Kinematics of Particles 2016 - Part A (Rectilinear Motion) PDFDocument36 pagesCH 1. Kinematics of Particles 2016 - Part A (Rectilinear Motion) PDFOstaz SasaNo ratings yet
- Lecture MarkovDecisionProcessDocument4 pagesLecture MarkovDecisionProcessjosselin.arjNo ratings yet
- V&N 354 LectureLesing5Document7 pagesV&N 354 LectureLesing5YemukelaniNo ratings yet
- Dynamics of Structure - Lectures PDFDocument25 pagesDynamics of Structure - Lectures PDFAnonymous lrwiLCOUfNo ratings yet
- Applied MechanicsDocument92 pagesApplied MechanicsAbhishek JoshiNo ratings yet
- Modabbernia LFO - LowDocument51 pagesModabbernia LFO - LowMohammad Reza ModabberniaNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Plants Worksheet # 5Document3 pagesPlants Worksheet # 5engr khanNo ratings yet
- Animals Worksheet # 4Document1 pageAnimals Worksheet # 4engr khanNo ratings yet
- Science 10Document1 pageScience 10engr khanNo ratings yet
- ScanDocument1 pageScanengr khanNo ratings yet
- Salery Statement April 2022Document1 pageSalery Statement April 2022engr khanNo ratings yet
- Bank Statment & MentananceDocument1 pageBank Statment & Mentananceengr khanNo ratings yet
- HealthDocument1 pageHealthengr khanNo ratings yet
- Account Activity: Transaction Date Post Date Transaction Reference No. Description Debit Credit BalanceDocument1 pageAccount Activity: Transaction Date Post Date Transaction Reference No. Description Debit Credit Balanceengr khanNo ratings yet
- 3-Phase Synchronous MotorDocument22 pages3-Phase Synchronous Motorengr khanNo ratings yet
- 03-000-R1 Alternative DC Power Systems SummaryDocument20 pages03-000-R1 Alternative DC Power Systems Summaryengr khanNo ratings yet
- 7TT3D0Document2 pages7TT3D0engr khanNo ratings yet
- Ceramic ResonatorDocument24 pagesCeramic Resonatordrm1238475No ratings yet
- Epg - I-: Service Training MalagaDocument26 pagesEpg - I-: Service Training MalagaqaisermolNo ratings yet
- Extrusion CampanellaDocument62 pagesExtrusion CampanellaCARLOSNo ratings yet
- Partition Coefficient EditedDocument17 pagesPartition Coefficient EditedcoltalbNo ratings yet
- Equipment Costing SizingDocument108 pagesEquipment Costing Sizingjk100% (1)
- cmp3 Nyc gr8 Scope and SequenceDocument8 pagescmp3 Nyc gr8 Scope and Sequenceapi-232678646No ratings yet
- Analysis of Hospital SystemDocument4 pagesAnalysis of Hospital SystemAirep OiralihNo ratings yet
- Brunswick SuppliesDocument41 pagesBrunswick SuppliesNathan Bukoski100% (2)
- TECHNICAL DATA Cogeneration Unit IET BIO 520 V01 - 50Document7 pagesTECHNICAL DATA Cogeneration Unit IET BIO 520 V01 - 50Elias RizkNo ratings yet
- Probabilistic Design Using ANSYSDocument26 pagesProbabilistic Design Using ANSYSstructuralmechanicNo ratings yet
- Acoustic Lubrication Handbook 2018 Web PDFDocument20 pagesAcoustic Lubrication Handbook 2018 Web PDFEswin Paico de la CruzNo ratings yet
- Iit Jee: Yoddha Batch For JEE Main and Advanced 2024Document9 pagesIit Jee: Yoddha Batch For JEE Main and Advanced 2024Shreyas PatelNo ratings yet
- s21 059Document7 pagess21 059Игорь БоровикNo ratings yet
- Design of Rectangular Combined Footing Supporting Two Axially Loaded ColumnsDocument3 pagesDesign of Rectangular Combined Footing Supporting Two Axially Loaded ColumnsThirdie LerajeNo ratings yet
- Improving Critical Speed Calculations Using Flexible Bearing Support FRF Compliance DataDocument27 pagesImproving Critical Speed Calculations Using Flexible Bearing Support FRF Compliance DataelrajilNo ratings yet
- 1.5V Double Layer Gans Cell (DLGC) : Alekz SystemDocument10 pages1.5V Double Layer Gans Cell (DLGC) : Alekz Systemhallo1234100% (3)
- Finals Steel DesignDocument2 pagesFinals Steel DesignJan KilokiloNo ratings yet
- Architectural Design - 2015 - Andrasek - Indeterminacy Contingency The Seroussi Pavilion and Bloom by Alisa AndrasekDocument6 pagesArchitectural Design - 2015 - Andrasek - Indeterminacy Contingency The Seroussi Pavilion and Bloom by Alisa AndrasekSherry Amgad Joseph Gabra SalehNo ratings yet
- ALP Solutions Friction Physics Eng JEEDocument8 pagesALP Solutions Friction Physics Eng JEEPranavMachingalNo ratings yet
- Nehru Institute of Engineering and Technology: T.M.Palayam, Coimbatore-105 Department of Mechanical EngineeringDocument12 pagesNehru Institute of Engineering and Technology: T.M.Palayam, Coimbatore-105 Department of Mechanical EngineeringRamkumar CNo ratings yet
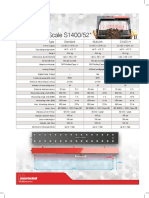
- Sensortechnik Optical Belt Scale Tech Sheet S1400 FinalDocument1 pageSensortechnik Optical Belt Scale Tech Sheet S1400 FinalyogaNo ratings yet
- Cambridge Pre-U Certificate: Cambridge Assessment International EducationDocument8 pagesCambridge Pre-U Certificate: Cambridge Assessment International EducationAlfred JacobNo ratings yet
- 2011 09 02 - 0444705007Document407 pages2011 09 02 - 0444705007gustavogardunno5853100% (2)
- Chapter 4 - Determination of Particle Size of Soils - Astm D422-63 (1990)Document10 pagesChapter 4 - Determination of Particle Size of Soils - Astm D422-63 (1990)Yena Cabalu100% (1)
- Matching ASC Valve Performance With Integrated Turbomachinery Control System PDFDocument4 pagesMatching ASC Valve Performance With Integrated Turbomachinery Control System PDFfri_13th100% (1)
- Using Ultrasonic Sonar Rangers: Some Practical Problems and How To Overcome ThemDocument1 pageUsing Ultrasonic Sonar Rangers: Some Practical Problems and How To Overcome ThemAkram LaliwalaNo ratings yet
- AWS D1.1 GuidesDocument7 pagesAWS D1.1 GuidesMuhammad FakhriNo ratings yet
- Reference Intensity RatioDocument2 pagesReference Intensity Ratioxavi lifeNo ratings yet
- Compressible AerodynamicsDocument9 pagesCompressible AerodynamicsMridu DasNo ratings yet