Download as pdf or txt
You might also like
- Understanding Operating Systems 8th Edition Mchoes Solutions ManualDocument20 pagesUnderstanding Operating Systems 8th Edition Mchoes Solutions ManualSarahWilliamsbtsk86% (14)
- 17spi SPDocument24 pages17spi SPSHREYAS MAGAJIKONDINo ratings yet
- Inter Integrated Circuit Bus Protocol (I C) : By: Dr. Mitesh LimachiaDocument49 pagesInter Integrated Circuit Bus Protocol (I C) : By: Dr. Mitesh LimachiaJay PatelNo ratings yet
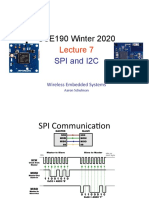
- CSE190 Winter 2020: SPI and I2CDocument17 pagesCSE190 Winter 2020: SPI and I2CliethNo ratings yet
- SPI Final 2022Document47 pagesSPI Final 2022Utsav VedantNo ratings yet
- Serial Interfaces I2C, Spi, I2SDocument37 pagesSerial Interfaces I2C, Spi, I2Seugen lupu100% (2)
- CENG507 Fall2020 Chap4Document40 pagesCENG507 Fall2020 Chap4Anonymous phisherNo ratings yet
- T3 Serial CommunicationsDocument67 pagesT3 Serial Communicationschaudhary kiranNo ratings yet
- What Is It? - Basic SPI - Capabilities - Protocol - Pros and Cons - UsesDocument29 pagesWhat Is It? - Basic SPI - Capabilities - Protocol - Pros and Cons - UsesDaniel ConstantinNo ratings yet
- SPI ProtocolDocument25 pagesSPI Protocol5191421030No ratings yet
- Serial Communication Protocols Part 2: Nasif MDocument26 pagesSerial Communication Protocols Part 2: Nasif MnobodyNo ratings yet
- Devices and Communication Buses For Devices NetworkDocument211 pagesDevices and Communication Buses For Devices NetworkDhrumeet PatelNo ratings yet
- Serial Peripheral Interface (SPI)Document5 pagesSerial Peripheral Interface (SPI)Benin JacobNo ratings yet
- Wired Communication (CNT)Document45 pagesWired Communication (CNT)Trọng QuảngNo ratings yet
- Lecture Notes 2Document42 pagesLecture Notes 2Prabal RawatNo ratings yet
- Spi ModuleDocument13 pagesSpi ModuleMuhammadSaeedTahir100% (2)
- I2C Protocol 1650400022Document14 pagesI2C Protocol 1650400022k cNo ratings yet
- Inter-Integrated Circuit (I C) BusDocument31 pagesInter-Integrated Circuit (I C) BusRanjith Raj100% (1)
- Serial Peripheral Interface: - Nidhi PanchalDocument29 pagesSerial Peripheral Interface: - Nidhi PanchalJaimin PanchalNo ratings yet
- Unit 3 Aurdino 2Document61 pagesUnit 3 Aurdino 2AshishNo ratings yet
- I2CDocument5 pagesI2CengandradefilhoNo ratings yet
- I2C ProtocolDocument20 pagesI2C Protocoladyadesai7No ratings yet
- Inter-Integrated Circuit Protocol: Presented by Abhijeet KapseDocument13 pagesInter-Integrated Circuit Protocol: Presented by Abhijeet Kapseyaseen22No ratings yet
- Islamic University of Technology: EEE 4483 Digital Electronics & Pulse TechniquesDocument20 pagesIslamic University of Technology: EEE 4483 Digital Electronics & Pulse TechniquesMUHAMMAD JAWAD CHOWDHURY, 180041228No ratings yet
- Serial Peripheral Interface BusDocument9 pagesSerial Peripheral Interface BusTuyen Dinh100% (1)
- I2CDocument29 pagesI2CVidushi GheerNo ratings yet
- I2C ProtocolDocument23 pagesI2C Protocol5191421030No ratings yet
- SPI To Interface AccelerometerDocument15 pagesSPI To Interface AccelerometerSANTHOSHNo ratings yet
- How I2C WorksDocument9 pagesHow I2C WorksKshitij GurjarNo ratings yet
- LPC2148 I2cDocument29 pagesLPC2148 I2cRavi RajanNo ratings yet
- I2c Bus Contr ReportDocument13 pagesI2c Bus Contr ReportSreeshmith Sreedar100% (2)
- Unit 3 Serial InterfacesDocument111 pagesUnit 3 Serial Interfacesmtechewit100% (2)
- By Alexander MaroudisDocument14 pagesBy Alexander MaroudiskingkeyNo ratings yet
- I2C Communication ProtocolDocument34 pagesI2C Communication Protocolyuosef hababaNo ratings yet
- I C Protocol: Devesh - Samaiya@pilani - Bits-Pilani - Ac.inDocument36 pagesI C Protocol: Devesh - Samaiya@pilani - Bits-Pilani - Ac.inMordhwaj Patel100% (3)
- Survey About I2C and SPI CommunicationDocument16 pagesSurvey About I2C and SPI Communicationtruongan15092002No ratings yet
- Embedded System: Serial Peripheral Interface (SPI)Document31 pagesEmbedded System: Serial Peripheral Interface (SPI)yuosef hababaNo ratings yet
- The I2C System Uses A Serial Data LineDocument7 pagesThe I2C System Uses A Serial Data LineJerry JamesNo ratings yet
- Serial Interfaces, Part Deux C and SPI: December 4, 2002 Presented by Eugene HoDocument18 pagesSerial Interfaces, Part Deux C and SPI: December 4, 2002 Presented by Eugene HoPronadeep BoraNo ratings yet
- MicroprocessorBasedSystems Term-II Lec3 SPI and I2C InterfaceDocument39 pagesMicroprocessorBasedSystems Term-II Lec3 SPI and I2C InterfaceMohamed SalahNo ratings yet
- Survey About Communication ProtocolsDocument20 pagesSurvey About Communication Protocolstruongan15092002No ratings yet
- Serial Communication Bus-Interface (Unit3)Document44 pagesSerial Communication Bus-Interface (Unit3)Surekha PittaNo ratings yet
- Project DesignDocument23 pagesProject DesignpadaNo ratings yet
- Explain The Physical Layer of The I2C ProtocolDocument7 pagesExplain The Physical Layer of The I2C ProtocolNEETHU PRAKASH100% (1)
- Lecture21 S13Document17 pagesLecture21 S13AliNo ratings yet
- Registration For Wiki Conference India 2011Document21 pagesRegistration For Wiki Conference India 2011Nitya SiddagangappaNo ratings yet
- I2C Serial Communication Protocol: Inter Integrated CircuitDocument7 pagesI2C Serial Communication Protocol: Inter Integrated CircuitSameer NandagaveNo ratings yet
- Introduction To Spi CommunicationDocument5 pagesIntroduction To Spi Communicationjoyal jose100% (2)
- I2C DatasheetDocument69 pagesI2C DatasheetlianjunliuNo ratings yet
- SerialCommunication and PCON RegDocument56 pagesSerialCommunication and PCON RegpriyaNo ratings yet
- Overview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia TechDocument7 pagesOverview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia Techdineshvhaval100% (1)
- Using The Mid-Range Enhanced Core PIC16 Devices' MSSP Module For Slave I C CommunicationDocument14 pagesUsing The Mid-Range Enhanced Core PIC16 Devices' MSSP Module For Slave I C CommunicationDario Darius100% (2)
- InstructionsDocument65 pagesInstructionsVinay Pratap Singh RajawatNo ratings yet
- I2C InarduinoDocument22 pagesI2C Inarduinoahmad jamelNo ratings yet
- 1-Wire Is A Device Communications Bus System Designed by Dallas Semiconductor Corp. ThatDocument5 pages1-Wire Is A Device Communications Bus System Designed by Dallas Semiconductor Corp. ThatrajeshNo ratings yet
- Communication InterfaceDocument45 pagesCommunication Interfaceprabhabathi devi100% (1)
- Design and Modeling of I2C ControllerDocument18 pagesDesign and Modeling of I2C ControllerAnkit PachouriNo ratings yet
- Spi and I2cDocument11 pagesSpi and I2cAbhay Tomar100% (1)
- I2c Serial ProtocolDocument9 pagesI2c Serial ProtocolShardul Deolankar100% (2)
- Tarjeta Madre AsrockP43DEDocument55 pagesTarjeta Madre AsrockP43DEJaime Zeballos RomeroNo ratings yet
- Puting DemystifiedDocument354 pagesPuting DemystifiedkumarNo ratings yet
- Ryans Product Book November - 2014 - Issue 70 - Computer Buying Guide For BangladeshDocument40 pagesRyans Product Book November - 2014 - Issue 70 - Computer Buying Guide For BangladeshRyans Computers Ltd.No ratings yet
- GNX4 em Espanhol PDFDocument127 pagesGNX4 em Espanhol PDFcristovao100% (1)
- Gigabyte Ga h61m d2h Usb3 Rev. 1.0Document33 pagesGigabyte Ga h61m d2h Usb3 Rev. 1.0nishatiwari82No ratings yet
- Lastexception 63851409773Document5 pagesLastexception 63851409773rayNo ratings yet
- Gated Clock ConversionDocument8 pagesGated Clock ConversionKillivalavan KaliyamoorthyNo ratings yet
- Manual Tecnico 880Document123 pagesManual Tecnico 880ivanzeabNo ratings yet
- 10.6.7 On H57 Express Chipsets - InsanelyMac ForumDocument12 pages10.6.7 On H57 Express Chipsets - InsanelyMac ForumCraig CooperNo ratings yet
- Vibrating Wire Indicator: Model Edi-51VDocument2 pagesVibrating Wire Indicator: Model Edi-51Vdox4printNo ratings yet
- Week 2 Cloud Computing Lecture 4Document47 pagesWeek 2 Cloud Computing Lecture 4sanwalNo ratings yet
- Junior Explorer 6 - 1. Keep in Touch Klucz OdpowiedziDocument4 pagesJunior Explorer 6 - 1. Keep in Touch Klucz OdpowiedziantekmatyniakNo ratings yet
- Instruction Guide Gang ProgrammerDocument21 pagesInstruction Guide Gang ProgrammerspotNo ratings yet
- Cisco Nexus Deployment Guide c07-574724Document18 pagesCisco Nexus Deployment Guide c07-574724Maimoona TanveerNo ratings yet
- Cortex-M3 Reference ManualDocument410 pagesCortex-M3 Reference ManualAgabier12No ratings yet
- Encoders: 4 To 2 Line EncoderDocument40 pagesEncoders: 4 To 2 Line EncoderLovely VasanthNo ratings yet
- Embedded System ArchitectureDocument10 pagesEmbedded System ArchitectureShruti KadyanNo ratings yet
- How To Identify and Diagnose Fan Failures On Sun SPARC Enterprise T5120/T5140/T5220/T5240/T5440 and Netra T5220/T5440Document4 pagesHow To Identify and Diagnose Fan Failures On Sun SPARC Enterprise T5120/T5140/T5220/T5240/T5440 and Netra T5220/T5440cresmakNo ratings yet
- Notes 1Document9 pagesNotes 1Purity Kangogo100% (1)
- Freescale User Manual 2Document4 pagesFreescale User Manual 2Andres SanchezNo ratings yet
- HDD Types 1. Parallel Advances Technology Attachment-: 3. Small Computer System InterfaceDocument2 pagesHDD Types 1. Parallel Advances Technology Attachment-: 3. Small Computer System InterfaceSanjay DeyNo ratings yet
- ITM-1602A LCM: User's GuideDocument19 pagesITM-1602A LCM: User's GuidegaikieuucNo ratings yet
- Wired Laser Barcode Scanner User ManualDocument12 pagesWired Laser Barcode Scanner User ManualVladimir RomeroNo ratings yet
- Ug1410 Zcu208 Eval BDDocument92 pagesUg1410 Zcu208 Eval BDVăn CôngNo ratings yet
- Oracle Timesten In-Memory Database On Oracle Exalogic Elastic CloudDocument13 pagesOracle Timesten In-Memory Database On Oracle Exalogic Elastic CloudKourinNo ratings yet
- Contract - Contract - अनुबंध अनुबंधDocument93 pagesContract - Contract - अनुबंध अनुबंधektadhullNo ratings yet
- Firmware 2020 JuneDocument2 pagesFirmware 2020 Junecreativesolu21No ratings yet
- esp268介紹Document4 pagesesp268介紹Charles Lin CruckNo ratings yet
- PLC ProgrammingDocument27 pagesPLC ProgrammingKavindu Ransara MudaligeNo ratings yet