Professional Documents
Culture Documents
Electronics V40 N10 19670515 LM Radar Altimeter
Electronics V40 N10 19670515 LM Radar Altimeter
Uploaded by
Paul CultreraOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Electronics V40 N10 19670515 LM Radar Altimeter
Electronics V40 N10 19670515 LM Radar Altimeter
Uploaded by
Paul CultreraCopyright:
Available Formats
Space electronics
Settling on the moon
Four-beam radar system that guided Surveyor 3 to the moon will also
furnish the velocity and range data to land the Apollo lunar module
By Charles J. Badewitz
Rya n Aeronautical Co., San Diego, Calif.
A la ndin g rada r that proved its capability by guid- down th e doppl er frequcncies into velocity co m-
ing Surveyor 3 to its landing on th e moon last ponents in vertical , latel:al , and longitudinal an-
month also will provide the data needed to land tenna directions and relate them to the spacecraft's
th e Rrst mann ed Apollo lun ar modul e (Ll\l) on the coordinate system .
surface of the moon. The· radar altim e ter's return signal is also mixcd
As th e two-man L)'[ descends toward the moon's with a portion of th e altimeter's tran smit ted pulse.
surface at abou t 60 mil es p er hour, its landing radar This produces a frequ ency proportional to the
will be switched on at an altitude of 50,000 feet. spacecraft's height above th e moon plus a fr e-
About three minutes later and 10,000 feet nearer, quency corresponding to the vchicle vc loc:tv al ong
tll C radar will b eg in to make continuous range th e altimeter bcam. Th e latter is rcmoved in th e
m eas urcm ents , and at 25,000 fe et it will b egin co m- range data convertcrs by utili zing the doppler sig-
puting th e velocity of th e module. The range and nals in velocity beams 1 and 2.
velocity dat::! will be pro cesse d along with auxiliary After process ing by th e radar, th e vclocity and
data from other sensors and th e res ults fed to th e range data is sent to th e lunar modul e's guidance
landin g control sys te m to in sure a so ft and safe computer in a serial binary form , and as puls e
landing. On ce th e spacccraft land s, th e radar's train s and doc analog vol tagcs to th e astron au ts'
work is cOll1ple ted and it rema in s on the surface visual displays.
of th e moon as part of the lun ar module's descent The landing radar's data will be combin ed with
s tage. altitude and velocity signals from th e space vehi-
Th e land in g radar u ses a three-beam doppler cle's inertial mcasur in g unit. Th ese d ~lta inputs are
velocity senso r and a sin gle-b ea m alitmetcr to weighted by the spacecraft's h eight above the
measure th e spacecraft's velocity and range rela- moon 's surfa ce, and program ed to assure the guid-
tive to th e lun ar surface. ance computer receives the mos t accurate input.
The rad ar return signal in each of th e veloci ty Errors in th e in ertial system tend to in crease with
sensor's rece iver beam s is mi xed with a portion of tim e. Landin g radar errors, on th e other hand , are
th e transmitted signal. Th e output of th e mixers de termin ed primarily by veloci ty and altitud e,
are audio doppler frequencies that are proporti onal th erefore th ey decrease as th e velocity and altitude
to th e spacecraft's velO City components along th e decreases.
respective beams. Frequency data converters break Th e initial effect of th e radar data on fh e space-
craft's guidance system is small , and increases as
th e descent progresses. However, as th e data from
th e landin g radar is factored into th e gu idan cc COI11-
The author
puter, it reduces th e effects of accumulated errors
Charles J . Badewitz is director of in th e in crtial unit; thus the landing radar updates
engineering at the Ryan
Aeronautical Co.'s Space Systems
th e inertial measuring unit.
Division. He was chief project Integrated Antenna
engineer on the lunar module
landing radar program and The four radar b eams are generated by two
desig ned a number of specia l- planar arrays on th e single integrated antenna as-
purpose airborne doppler
navigation compu t ers. scmbly pictured on page 113. Th e groups of alter-
nate slotted waveguides in th e large center section
110 Electronics I May 15, 1967 IiO.'!!!
DOPPLER VELOCITY SENSORS
INITIAL
BRAKING
MANEUVER
5,500 FEET
PER SECOND
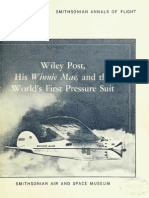
Powered descent begins when lunar modu le 's altitude is about 50,000 feet. Throughout the tilt maneuver, the four
radar beams are kept pointing at the lunar surface automatically by the guidance computer. The repositioning
is accomplished by rotating the antenna of the la nding radar around the Y axis into either of two positions.
are the transmitting antennas; the receiver anten- make each receivin g b eam axis colin ear with th e
nas are th e outrigger sections around it. Th e corresponding transmitted b eam axis.
E-p lane slottcd guides in th e center section tran s- Th c altim et er's reccivin g array is boresighted so
mit th e altim eter frequcncy-modu lated continu ous that co in cidcnce of its main lobe with th e altim eter
wave; and th e alternate H-plan e slots transmit a tran smitter's main lobe is achi eved, yieldin g in turn
c-w velocity sensing signal. th e desired two-way pattern for the altimeter.
The thrce narrow b eams from th e velocity scnsor
Perpendicular beams
an tenna emanate from th e planar arlay in th e same
mann er as legs are ex tendcd to form a tripod . Th e antenna is mounted on a rotating pedes tal
Th e attitudes of th e b ca ms during the initial on th e underside of th e spacecraft's descent stagc.
braking and hover man cuvers are illustrated by th e Th e antenna can be rotated about the spacecraft's
drawing shown above. The multiple b eams are Y axis , into ei th er of two positions, automatically
generated at fix ed angles relative to a line drawn by th e guidance computcr, or manually by th e
perpendicu lar to th c face of th e planar array. Th e pilot as th e eraft's attitude changes. This keeps th e
outrigger rccc ivin g arrays, which have th c same rad ar beams as nearly p erpcndicu lar to the lu nar
slot or ientation as tll(' " clocity tran smitter array , surface as possible.
are th e three broadside arrays . Thcir gco mctri cs Th e diagram on page 114 details the basie op-
iii.'! Electronics I May 15, 1967 111
I
VELOC ITY
II
I
, - - RECEIVER -..
ARRAYS
BEAM I I
Ii !
I
____._______ ~
BEAM 4 "
L- ___________ ~L
Lunar module's landing radar combines transmitter velocity and altimeter signals with the signals in
return beams to produce doppler frequencies proportional to the space.craft's velocity and range
from the moon . Data converters break down the doppler signals into velocity components in the X, Y,
and Z direction. These are input signals for th e module' s guidance computer.
era tion of th e radar's velocity sensors. Th e b eam quencies proportional to th e component of th e
angles and th e energy pa ttern shown are for b eam spacecraft's velocity along th e b eam of concern .
1, but the pa ttern s and angles for the other two Th ese frequ en cies, D D ~ , and Da, are comb ined to
velocity beam s are similar. produce th e orthogonal " velocity components su ch
Two orthogonal sets of velocity components are as Vxa , Vy ., and Vza .
measured in th e coordin a te sys tem of the antenna. F or eX'a mpl e, th e component of velocity relative
The Vxn , V)'a, and Vza components are shown to the antenna axis, V x ., is computed as follows:
on page 114, where V xa coin cides with the center
line of three velocity sensor b eam s and V)'a lies in Vxa =
A CDI + Da) (1 )
th e plane of velocity sensor b eam s 1 and 2. The 2 cos A cos ~ 2
coordin ate sys tem for Vxa ' , V.r . ' and Vza' velocity
co mponents is rota ted about the V)'a axis through W here:
an angle, t, to cause Vxn ' to lie in th e plane of A = electromagnetic radi ation wa velength
beams 1 and 2. The primed velocity components A = beam 1 an tenna angle
are used only for the pilot's visual d isplays . ~ = beam 3 antenna angle
T o determine veloci ty, the radar return signal is DJ = doppler shift along beam 1
mixed with a portion of the tran smitted signal. D3 = doppler shift along beam 3
T hi s is a process of d irect radio-frequency to audio- The fo llowing equ ation computes the range to
frequ ency conversion which produ ces doppler fre- the lunar surface. The K(Dl +
D 2 ) term is the cor-
fd
( QUADRATUR E
PAIR I
+ (QUADRATU RE PA IR I ERROR FREQUEN CY
VELO CITY
SENSOR rl SINGLE -
SIDEBAND
MODULATOR
f-+
I· F
AM PLIF IER --.. MIX ER 1 LOW- PASS
FILTER
--.. INTEGRATO R --+
VOLT AGE -
CONTROLL ED
OSC ILLATOR
....
f
Ie
R-F
(QUADRATUR E
OSC ILLATOR
PAIR )
LM 's frequency tracker is a closed loop servosystem that processes sensor and reference signals.
112 Electronics I May 15, 1967 i."!
rection factor \\"hi ch compensates for doppler shift
in th e rangc beam.
(2)
where
R = range to the lunar surface
c = speed of light
S = a ltimeter 's t ransmitter frequency deviation
r ate
fa = a lt imeter 's received frequency, including
range and doppler components
K = scaling constant
D2 = doppler shift along beam 2
The radar antenna assembly divides each dop-
pler signal in quadrature pairs. The b eam's quad-
rature outputs are amplified and u"sed as input sig-
nals to th e frequency trackers in the electronic as-
sembly. Th en recombination of the quadrature
pairs and sin gle sideb and comparison techniques in Landing radar antenna is covered with special thermal
finish to protect it against extreme temperatures in space .
the frequ ency trackers validate th e signals and The center section contains the altimeter and velocity
measure magnitude and sense of velocity. sensor transmitting antennas. The outrigger antennas
Th e radar's receiver u ses narrow ~band filter cir- at either side of the center section are for the receivers.
cu its (l ab eled frequency trackers in the b lock dia-
gram) to detect doppler signals, and to separate
th e true doppler signal from noise b ackground. Radar system characteristics
Th e opera tion of the frequency t rackers is traced Type of system
b y the block diagram b elow, left. Th e tracker is velocity sensor c-w, 3 -beam
b asically a closed loop servosys tem whose inputs rada r altimeter f-m / c-w
are the doppler qu adrature pair, fd , from the radar
Altitude capability
velocity sen sor, and another pair called the carrier velocity 5 to 25,000 feet
qu adra ture p air, fe, from a fixed r-f oscill ator. altimeter 10 to 40,000 feet
Th e input circui t of the frequ ency tracker is a
sin gle sideband modula tor which accepts the dop - Velocity capability Vxn - 2,000 to + 500 / fps.
pler quadrature p air input and another feedback Vyn - 500 to + 500 / fps.
qu adra ture pa ir, approxim ately equal to fe + f,I, Vzn - 500 to + 3 ,000 / fps .
from a voltage-controlled oscillator. The single
Altimeter antenna
sideb and modula tor output is amplified b y an in-
type planar array
termedia te-frequency amplifier and mixed with the gain 50.4 db
fe quadrature pair in a second mixer. beamwidth 3.9 0 E plane
The output of that mixer is the error frequency of 7 .5 0 H plane
the trackin g loop. This signal is filtered, integrated,
Velocity sensor antenna
and u sed to drive the voltage-controlled oscillator.
type planar array
The oscilla tor' s output is" applied to the frequency gain 49 .2 db
converters and also fed back and u sed as a carrier beamwidth 3.r E plane
frequency for the single-sideband modulator. Un - 7 .3 0 H plane
der tracking conditions, the output of the single
Transmitters
sideb and modulator is very nearly the same as th e
type solid state
carrier frequency fc • frequency
Once the true doppler signal is acquired, it is velocity sensor 10.51 Ghz
tracked with a high order of accuracy, about 0.1 %, radar altimeter 9 .58 Ghz
and the tracker output frequency is almost the same
as the center frequency in the received doppler Output power
veloc ity sensor 200 mw min . (50 mw per beam)
signal b and.
altimeter 175 mw min.
E ach b eam's frequency tracker sends a doppler
signal to the velocity and ran ge data converters Altimeter
along wi th a d-c step voltage th at indicates acqui- modulation sawtooth f -m
si tion and authentication of a true lun ar return frequency 130 hz
signal. The conver ters then translate the doppler deviations 208 Mhz and 42 Mhz
sign als in to orthogon al velocity sets in the coordi- Response time
na te sys tem of the an tenna. The guidance compu ter 25 ,000 feet 0 . 1 sec
uses this data to steer the lunar mo dule. E quation
A.'!!I Electronics I May 15, 1967 113
, . - - - - - - - - - - - - -- - - - - - -- ---- - -- - - - - _. __._ - -- -- - - - - - - - - - ,
r
Why did Surveyor 3 bounce?
When Surveyor 3 hopped and becomes practically weightless be- cutoff failure by sending confusing
skipped on the moon last month, cause the moon's gravitational pull signals to the guidance computer.
many people were concerned that is 1/6 the force of the earth 's, and If one of the three velocity sensing
the same thing could happen to the Surveyor's retrorockets are beams were pointed down to a
the Apollo lun ar module when it thrusting in the opposite direction hole, it may have generated some
reaches the moon's surface. If it to the pull. All the while, the space- contradictory data concerning the
does happen, it probably won't ship's guidance computer is receiv- Surveyor's velocity across the lunar
be the fault of the landing radar. ing velocity and range signals from surface. However, the engine cutoff
Apollo will use an updated version the landing radar. As the craft is made by a signal generated by
of the radar system aboard Sur- passes the 14 foot mark, the radar a fourth beam-the altimeter-
veyor 3. The landing rad ar will only generates a range mark which the and if this beam was pointing
indicate the range to the lunar sur- Surveyor's control system uses to down a hole the spaceship would
face during the last seconds of cut off the engine. Surveyor then have thought it had farther to go.
Right ; the actual landing will be falls free the remaining distance On ce before at the test station
made by the astronauts. to the moon. at Holloman Air Force Base, New
What really happened to Sur- A landing with the engines still Mexico, the Surveyor's engines
veyor 3? The scientists at the Jet burning is actually a softer landing didn't cut off and it bounced. TO
Propulsion Laboratory at Pasa- than normal - because of the damage was done to the space-
dena, who control the Surveyor weightlessness. But the spacecraft craft or any of the instruments on
program haven't made known the would come down , touch, boun ce, board . That time the scientists
results of their investigation into and touch again, and continue to said it was the fault of the space-
the cause-but one can speculate. do so until the ship's momentum ship's instrumentation , not the
During a nOlmal Surveyor de- is dissipated in the bounces. radar. In the case of Surveyor 3,
scen t, the spacecraft slows to about Ryan Aeronautical Co. engineers Ryan engineers think the same
five feet per second at 100 miles tend to disclaim early theories thing may have happened.
altitude. At this point, the craft that the radar caused the engine W.J .E.
1 shows how the sum of the doppler signals from the doppler frequency in the altimeter return signal.
b eam 1 and b eam 3 are multiplied by a constant The measured range and the velocities are h eld
coefficien t (which is a function of the beam angles) ready in the radar's signal data converters for read -
to yield Vxn . V.rn and Vza and the range are obtained out when requ ested by th e guidance computer.
in a similar manner. The computer samples the velocity and range
The measurement of range is accomplished in an data sequentially in a cycle that repeats every 80
analogous manner, th e only difference b eing that milliseconds.
some com p en sa tion for th e doppler shift along the
Spurious signal rejection
range b eam is required. This is provided in the
velocity and ran ge data converters by summing The basic task of the frequ ency trackers is to de-
th e doppler frequ encies in b eams 1 and 2, scaling tect relative motion b e tween the vehicle and th e
th e summation , and subtracting th e result from lun ar surface. However certain physical objects on
th e lunar module, such as hold-down b elts that
come loose wh en th e LM and th e command and
V,. service module separate, may b e in the radar b eam
and moving-thus causing spurious signals. To
avoid acquisition and tracking of th ese signals,
unique circuitry h as b een incorporated into fre-
quency trackers to examin e all signal s during th e
search mode and reject all except the true doppler
return signal.
Th e logic used in re jecting spurious signals is
based upon recognizin g that returns from th e vi-
brating physical elements contain double side-
b ands. Tru e doppler signals h ave ju s t one s ideband.
Th e technique that is used to discriminate against
_BEAM 3
spurious signals is simply one of examining the
signal level in th e positions of both sidebands.
BEAM I
The tracking filter examin es th e level in one s ide-
/
----.",,;' band; and a noise-sampling filter examin es th e level
---- --./ /
.;'
/
in the other. A comparison is made and if the signal-
to-nois c ratio exceeds a prescribed value, th e acqui-
Radar velocity sensor's beam 1 geometry is typical of sition circuitry allows the frequency tracker to
the landing radar' s four beam patterns. track the signal.
114 Electronics I May 15, 1967 &i.."!
Space electronics
Digital tester okays Apollo's altimeter
Specially designed test set counts frequ ency and averages it
over the pulse period to measure slope and linearity accurately
By V.M. Andreone and J.H. Poi rie r
Electron ics and Space Systems Division, Ryan Aeronau t ica l Co., San Diego, Calif.
Before it leaves the earth, the radar that will guide countered test problems that cou ld no t be solved
the Apollo lunar module to a safe touchdown on the with existing equipment.
moon's surface will b e ch ecked out with equipment For example, the frequ ency modu lator, the heart
that has no precedent or peer. of th e radar altimeter that makes continuous m eas-
Like most of th e electronic hardware aboard the urements of th e spacecraft's distan ce from th e lunar
lunar module, th e radar altimeter has some ex tra- surface, required gear with a measurement accur-
ordinary tes t requirements. In almost every sub- acy 10 tim es b e tter than the tighte st modulator
assemb ly, th e Ryan Aeronautical Co. engineers en- tol erance. And th e equipm ent mu s t determin e in-
accuracy in an altimeter that will operate at 25
times the h eight (50,000 fee t) and twice th e fre-
Glossary of terms qu ency (X band, 5.2 to 10.9 Ghz) of conventional
airborne puls e radar altimeters.
Downsweep average slope, m:
Since no commercial tes t equ ipm en t could meet
The f req uency deviation over t he downsweep specifications, Ryan engin eers developed th eir own
pe ri od di vided by th e downsweep pe riod, T. digital tes t set. Made with off-the-shelf integra ted
circuits , it samples the modulator's radio-frequency
m = .1 (T df (t) dt = ( fJ! _ fL) 1
TJo dt T output and counts th e chan ges in the output fre-
qu ency as a function of tim e. By averaging the fre-
where fJ[ and fL are the high and low limits of the qu ency changes, the r-f wave's sweep rate or slope
mod ulated transmitted frequency.
is determin ed as well as th e r-f pulse's lin earity
linearity, I: and upsweep and downsweep times.
The percentage deviation from the downsweep Th e di gital averaging measurement technique
average slope, m, of the measured average slope can also b e u sed to plot any period ic frequency-
for any 10% portion of the total downsweep period. modulated signal as a function of time, provided
that th e puls e time p eriod is greater than the tes t
I = [ (~i)* - m ] 1~0 equipment's 700-microsecond sampling time.
*a verage value over 10% segment of T Altimeter operation
Downsweep/Upsweep ratio, a: Th e output frequency of the radar altimeter's
modulator varies as a sawtooth function, shown
The ratio of the downsweep time period to the on page 116, from a center fr equency of 99.79
upsweep t ime period.
megahertz. Frequency multipliers raise th e output
to an X-band center frequ ency, which is transmit-
ted to th e lunar lan din g surface. The radar return
Sweep cycle, ts:
signal is received, amplified , and the doppler fre-
The t ime required to complete one downsweep and quency component ex tracted.
one upsweep cycle . A portion of the downsweep section of the
transmitted and return signal is sampled by the
i.."! Electronics I May 15,1967 115
qu ency b etween f'J' and fit an d inversely propor- r
tional to m, th e average sweep rate or slope. As
equation 1 reveals, small varia tions in sweep rate
have a large e ffect on range measurement. Speci fi -
fe r---~~---7~----~~--~------~~~ call y, a 1% error in average slope is reBec ted as a
f L -- - - - - , 2 % crror in range.
I
Th e altimeter's freque ncy modulator operates in
r- --+ T t
',
t---
three mod es. In mode 1, th ere is a h igh deviation
I--- ts --1 / BLANKING SIG NAL
frequ ency. It is u sed wh en th e sp acecraft descends
from an altitud e of 2,500 fee t to th e lun ar surface.
/ t --- In thi s mode, th e out put fr equ ency vari es from
:: U~U
99.998 Mh z to 99.582 Mh z, a d eviation o f ± 208 kh z.
I
1 A large frequen cy d eviat ion is rcgu ired for a more
accurate range de termina tion . Th e second mod e is
switched in when th c spacecraft is at an altitud e
Frequency of Apollo radar altimet er' s modulator varies above 2,500 fee t. In this mo ck , th e fr equ cncy onl y
as a sawt ooth fun ction with a center frequency of 99.79
Mhz . A b:anking pulse synchronized to the r-f wave is also deviates 4l.6 kh z. In both mod es 1 and 2 th e output
produced. Frequencies fll and f r. are the upper and lower wavefo rm s are th e same with equal swcep times.
band limits of the sawtooth; and T and t' are the Th e third mod e is call ed th e d cviation -inh ih it
downsweep and upsweep pulse periods . mode. As th e nam e impli es, th e output frequ ency
is a cons tant, unm od ulated 99.79 Mh z. ~r o d c 3
is actually a built-i n tes t mod e for centcr fr e-
altim eter's range process in g circuitry, an d the in-
qu ency checks and is not u til izcd durin g High t.
s tantaneous frequ ency difference, Llf, between th e
In additi on to th e r-f output, th e modulator also
two is de tcrmin ed . Thi s frequ ency differ ence is
generates a b lankin g Sig nal. Th is s ignal has th e
related to th e range b e tween th e spacecraft and the
same tim e peri od as th e do \\'nsweep porti on of th e
moon 's s urface by th e equation
r-f pul se ; and is synchroni zed wilh th e sw eep fun c-
2~{ )
tion. Th e blankin g signal is present on ly during
M = (fr - f R ) = m ( ± fd (1) operation in modes 1 and 2.
\Vh ere Tight test tolerances
f.r = (ranf'mittC'd frequency Th e do\\'n sw('ep average slope proved to b e the
fR = ]'('cf'ivf'd frf'quency mo s t d ifllc ult modu lator parameter to te s t. It mu s t
H range be measured w ith in an accuracy or 0.0.')(/; , 10 tim es
fel clopplf'r fl'equf'ncy
111 aver[lgf' s\ycep m(e = rate of change of the be tter than th c slope tolerance itself. In the low
tl'[ln smitied frequency as a function of tim e d eviation mod e, th e d igital tes t set had to detect a
c ve locity of lig ht. change of 500 parts-per-mi lli on in a slope of ap-
T he range is proportional to th e difference in fre- proximately 12 megahertz p er second. Thi s is
equi valent tu a chan ge in s lOl;C of 6,000 hertz p er
second. Th erefore, over one swc(' p cycle, th e ma\ i-
mum allowab le frequ ency d eviation is 42 h z.
Sin ce lin earity meas uremcnts arc qualiti vely th e
sa me as th e sweep slope measurement, th e .S( ·~
fH lin earity speci fi ca ti on is eas il y im plem cn ted h y
.... .... wh atever techniqu e is chosen to d etec t changes in
.... ....
,, slopc. ~1 (' a s urin g center fr eg ueney with in 0.03%
, accura cy is not a major prob lem si nce the ab solu te
valu e of th e center fr equ ency is very large. I-
Nt :'\ The tes t se t meas ures th e sw('ep slope b y direc tl y
fe ·· - - - - - - - - - - sampling the fr equ ency modu lators r-f output. Thc
di gital averaging tcchniqu e is unaO:ccted b y cen ter
fr eqll ency Bu ctuation s and more than mee ts th e
tes t's accuracy requircmcnts. Lincarity and cen ter
frequ ency error mcas uremen ts rcs ult naturall y fr om
)
th e slope measurement.
fL ~
. ~--~------------___+~--~~- Th e quantity Ll~ = NJ - NJfJ is independ ent of
~' 6'~- center freguency. Th e larger th e sa mplin g intervals,
th e larger th e value of t. N for a given va lue of m;
thu s, th e resolution improves as the samplin g in -
Frequency modulator'S average slope is rep resented by terval in creases.
the solid line between f ll and f... Nonlinearities are
H oweve r, th cre is a trad eo ff to b e consid ered.
depicted by the dashed inverte.d S-curve. The tinted
areas are equivalent to the change in transmitter fre- As th e samplin g interva l in cre a ses, th e slop e aver-
quency during pulse sample intervals N , and N,o. age is taken over a p rog ress ively s maller po rtion
11 6 Electron ics I M ay 1 5, 1967
RESET
RE GI STER
Nl N2 N3 N4 N5 N6 N7 Na Ng NlO
R-F INPUT 5 6 7
4 a
3 DECK 1 9
BLANKING
SIGNAL
--L SWE EP RATE
~(o-------IL~~ ____j------------------t---r--t--i-------------------r~R~E~S~ETT~
-=- INITIATE
TEST UP COUNT
PU SHBUTTON 5 - DIGIT REVERSIB LE
ACCUMULATOR AND
DIGITAL READOUT
DOWN COUNT
After m ixing and f ilt er ing, modu lato r 's r·f ou t pu t pas ses throu g h AND g<Jtes in'"o t he dig i' <1 1 t c s ~ set s
cou nt accumulator. Sweep ra te (ave rage slope) measurem ents are made by puttir.g S, in the swee p rat e
po sition and averag ing t he transmitter frequen cy over one cycle. This det er m ines t he most
signifi ca nt digits. Averag ing t he freq uency ove r 1,0 0 0 cycie s det ermin es th e I c c: s ~ significa nt digit s.
LRES ET 1RESET
i
I
I
10 - Mh z
CRYSTAL OSC f----
lO - Mh z DIVIDE
BY 7,000
-
AND
GATE
..... 10-STAGE SHIFT REGISTER
I REF LI MITER
I -- ~
NlO
I ENABL7 r
R- F I 1100-Mhz I
INPUT I ISOLATION AMP LI
I
a:
o
I-
I
I LO W-PASS
<l:
-'
=> I
90-Mhz
MIXER 1 FILTER AND l -
Cl CRYSTAL OSC I
o
:::!'
I LIMITER
>-
I
u
Z
W CONTACT
M O MENTAR Y~
=>
o INITIATE TEST ~'--
w
a: PU SHBUTTON CLEAR F 5- DIGI T
"- --lI
...L
r DELAY AND
If ESET
r-
-
I
BINARY
SET F
GATE
ACC UMULATOR AND
DIG ITA L DISPLAY
RE SET
RE SET AN D
RECYCLE
LOGIC
BL ANKI NG
51 GNAL I
J-, BLAN KING -
IN VERTER
SI G AM PL
Center frequency measurements are made by the test set' s configuration , shown in tint. One microsecond
after the test button is pressed, the binary circuit enables the AND gate and the accumulator cou nt s
r·f pulses until the end of the shift register 's t ime interval, N IO• This count is proportional to the
center frequency. To measure upsweep and downsweep time, the test set is switched to the configuration
represented by th e blocks outlined in solid color. The black -bordered blocks are used during bot h tests.
Electronics I May 15, 1967 117
of tlle downsweep cycle. Furthermore, th e longer down sweep p eriod into 10 subperiods of 700 f-Lsee.
the sampling interval, the greater the effect of non- Th e r-f input from th e modulator is buffered by
lin earities on the measurement of average slope. passing it through an isolation amplifier, and mixed
with the output of a 90-Mhz crystal oscillator. Th e
Linearity measurement
difference frequency is filtered and limited and
The worst-case nonlinearity in the frequency made availabl e for counting at intervals correspond-
modulator output is ± 5% . For a given nonlinearity, ing to th e selected value of t:,. N.
L , the percentage error, p, in the calculated slope By means of switch Sl , the frequency over 1 or
for a given T / M ratio is: 1,000 sweep cycles can be averaged_ A test over
p = L/ [T/ 6 t] - 1
on e sweep cycle determines th e most significant
di gits of the measurement. A second nm over 1,000
For th ese tes ts, a valu e of 10 w as selected for cycl es defin es th e least signifi cant di gits.
T / ~t b ased upon th e maximum allow able slope Th e two-deck rotary switch S ~ performs th e
error in th e modulator's output, th e tim e allowed for logic that enables th e test set to di stin gui sh b e-
averaging, and cos t consideration in implementing tween nonlin earity and sweep rate tes ts.
th e b alance. To measure sweep rate, switch S2 is placed in
Digital avcraging techniqu es are accura te if a suf- th e SWEEP RATE position. In this position , th e signal
fi cient number of sweep samples is used. on th e wiper of th e fir st deck is N 1 • Al so N 10 is
An error analysis b y a Ryan Aeron autical Co. conn ected through th e wiper on th e second deck
ma th ema ti cian, Robert Golden, determined that to input e of gate G ~ . This p ermits th e processcd
averaging th e results of four cons ecutive sets of r-f signal to pass through to the accumulator during
4,500 sweep-rate measurements, each in the low th ese intervals , for 1- or 1,000-sweep cycles, de-
d eviation mod e, and each set having an inh erent p ending on th e se tting of St .
accuracy of 0.5 %, yields a new accuracy of 0.025 %. During th e Nl tim e interval, th e r-f input drives
By averaging an error over a greater number of th e reversible accumulator in a positive direction ;
sweeps, accuraci es within 0.01 % can be achieved. during th e NIO interval, the accumulator is driven
Th e test set also measures th e modulator's center in th e opposite direction. The result is t:,. N, which
frequ ency drift to an accura cy of 0.0012 % . is accumulated for 1 or 1,000 sweeps, and read out
Pulse counters on th e digital display.
Wh en th e rotary switch is in positions 1 through
Th e top diagram on page 117 demonstrates the 9, the gate G ~ at the DOWN input of the accumu la-
mechani zation of th e sweep rate and lin earity meas- tor is inhibited, and a measure of the frequency
urcmcnt system. Th e clock is a 10 Mhz oscillator within th e selected intcrval is obtaincd. The UP
whos e output is divided to form a train of pulses, input is enabled during this interval , and as b eforf"
each 700 microscconds in length. The 700-,.,.sec either 1 or 1,000 consecutive readings may ·b e
pulse p eriod is the desired sampling interval. The stored, and read out at th e end of th e test.
puls e train is a source of shift pulses for a 10-stage
shift register wired so that only one stage can Finding fo
contain a log ical 1 at any tim e. A shift pulse ad- In th e lower diagram on page 117, th e tinted sec-
vances that 1 from on e stagc to th e next. As a tions show how th e tcst system is configured to
result, lin es N 1 throu gh T10 will each carry a pulse make mode 3 center fr equ ency measurements. Dur-
consecutively, for a peri od of 700 ,.,.s ec. vVith th e ina this tes t, th e blanking pul ses are not u scd.
down swcep portion of th e bl anking sign al initiating To make th e test. th e opera tor presses th e initi a te
thi s shifting sequ ence, the ne t result is to divide the tes t pu shbutton. This resets th e divide-by -7,000
timing circuit, th e 10-stage shift reg istcr, and th e
Th e authors 5-digit accumulator, and after a 1-f-Ls cc delay; s.ets
V.M. Andreone designs computers th e bin ary logic circuit which enabl es th e tnnlll g
for data handling. Prior to generator and th e AND gate input to th e accumula-
joining the Ryan Aeronautical Co., tor. Processed r-f pulses from th e mixer are passed
he was a systems engineer
developing central data processors
b y th e AXD gate into th e accumulator. Th e trailing
for Apollo tracking ships. edge of th e NIO interval pulse, which occurs 7,000
He earned his master's degree at f-Lsec after the start of delay, clears th e binary an,d
the University of Pennsylvania. terminates th e frequ ency count. Th e accumulator s
digital readout th en shows a count which is pro-
pOl·tional to th e modulator's center frequ ency_
J.H. Poirier i s a design specia list Th e blocks outlined in solid color illustrate the
at Ryan and ass ist ed in the
developme nt of digita l t est
test system's configuration wh en ch ecking sweep
equipment used to m easure the tim es. For this test, the r-f input is removed and the
accuracy of f-m space alti met ers. blanking signal used. The clock signal is gated
Prior to joini ng Ryan, he was an by th e upsweep or downsweep portions of th e
inst rume ntat io n engi neer at th e blanking signal into th e accumulator for one cycle.
Naval Electron ics Laboratory.
Th e rcsu lting count of th e clock frequency is pro-
pOl-tional to the up- or downs weep period.
118 Electronics I May 15, 1967 i.'!
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The "Blue Suit" Space Station: Giuseppe de Chiara Foreword by Dwayne Allen DayDocument31 pagesThe "Blue Suit" Space Station: Giuseppe de Chiara Foreword by Dwayne Allen DayPaul CultreraNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 1964 Spaceport News Summary FinalDocument47 pages1964 Spaceport News Summary FinalPaul CultreraNo ratings yet
- AD0669103Document266 pagesAD0669103Paul CultreraNo ratings yet
- Road To The Moon Through WNYDocument17 pagesRoad To The Moon Through WNYPaul CultreraNo ratings yet
- Automatic Theodolite For Pre Launch Azimuth Alignment of The Saturn Space VehiclesDocument6 pagesAutomatic Theodolite For Pre Launch Azimuth Alignment of The Saturn Space VehiclesPaul CultreraNo ratings yet
- Air Power History 2017 FallDocument68 pagesAir Power History 2017 FallPaul CultreraNo ratings yet
- North American RockwellDocument36 pagesNorth American RockwellPaul CultreraNo ratings yet
- Platform: F TheDocument39 pagesPlatform: F ThePaul CultreraNo ratings yet
- The Rope Memory-A Permanent Storage DeviceDocument14 pagesThe Rope Memory-A Permanent Storage DevicePaul CultreraNo ratings yet
- TCMR V02Document20 pagesTCMR V02Paul CultreraNo ratings yet
- Apollo Personal Crew EquipmentDocument123 pagesApollo Personal Crew EquipmentPaul CultreraNo ratings yet
- Saof 0008Document138 pagesSaof 0008Paul CultreraNo ratings yet
- Apollo Skylab Suit - Program Management Systems Study Vol IDocument254 pagesApollo Skylab Suit - Program Management Systems Study Vol IPaul CultreraNo ratings yet
- Gemini B Mol SchematicsDocument30 pagesGemini B Mol SchematicsPaul CultreraNo ratings yet
- 19720025202Document67 pages19720025202Paul CultreraNo ratings yet
- Saturn Engines - Saturn RocketsDocument2 pagesSaturn Engines - Saturn RocketsPaul CultreraNo ratings yet
- Lunar Sample Tool CatalogDocument101 pagesLunar Sample Tool CatalogPaul CultreraNo ratings yet
- Project Gemini Technology and Operations - A ChronologyDocument324 pagesProject Gemini Technology and Operations - A ChronologyBob Andrepont100% (2)
- Mission Control Center Familiarization ManualDocument159 pagesMission Control Center Familiarization ManualBob AndrepontNo ratings yet