
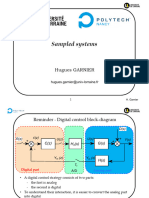
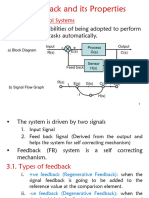
5 Block Diagram Representation of LTI Systems
5 Block Diagram Representation of LTI Systems
You might also like
- CleanTalk: 4 Ways of CommunicatingDocument26 pagesCleanTalk: 4 Ways of CommunicatingCatalin Octavian Blaga100% (1)
- Guided Notes - Production CurvesDocument7 pagesGuided Notes - Production CurvesyogurtkingyahooNo ratings yet
- August 14 - Sequencig Using Signal WordsDocument3 pagesAugust 14 - Sequencig Using Signal Wordsshe88% (8)
- Q3 G11 Physical Science Module 7Document19 pagesQ3 G11 Physical Science Module 7Lebz RicaramNo ratings yet
- Job Order CostingDocument49 pagesJob Order CostingKuroko71% (7)
- A Smart Motor Controller For E-Bike Applications PDFDocument4 pagesA Smart Motor Controller For E-Bike Applications PDFaungwinnaing100% (1)
- CH 5 Test BankDocument75 pagesCH 5 Test BankJB50% (2)
- 5 Block Diagram Representation of LTI Systems: U (T) G(S) y (T)Document3 pages5 Block Diagram Representation of LTI Systems: U (T) G(S) y (T)Yassine DjillaliNo ratings yet
- Modern Control Engineering: System's RepresentationDocument30 pagesModern Control Engineering: System's RepresentationBrooklynPrinceNo ratings yet
- T FN, Pole-Zeros, Block Diagram & SFGDocument28 pagesT FN, Pole-Zeros, Block Diagram & SFGArsal AslamNo ratings yet
- Control5 2020 Block Diagram ManipulationDocument20 pagesControl5 2020 Block Diagram ManipulationKhong JunYonGNo ratings yet
- Notes 4Document13 pagesNotes 4lili aboudNo ratings yet
- L4 1st 2nd Order CharacteristicsDocument28 pagesL4 1st 2nd Order Characteristicsalex carterNo ratings yet
- Lect 9 Overall Transfer Function of A Closed-Loop Control SystemDocument8 pagesLect 9 Overall Transfer Function of A Closed-Loop Control SystemZaidoon MohsinNo ratings yet
- Chapter 3Document37 pagesChapter 3Izzat AiresNo ratings yet
- Updated Chapter 2 Control Systems Lecture NotesDocument22 pagesUpdated Chapter 2 Control Systems Lecture Notesvijay rajNo ratings yet
- Frequency Response Method (Continue)Document37 pagesFrequency Response Method (Continue)Edo SunardyNo ratings yet
- SolutionDocument6 pagesSolutionMihir Kumar MechNo ratings yet
- Topic06 ReviewedDocument4 pagesTopic06 Reviewedsuper junlinNo ratings yet
- Bode Plot PresentationDocument48 pagesBode Plot PresentationJulcemar CapellaroNo ratings yet
- Control Theory: Germán Andrés Ramos, PHDDocument45 pagesControl Theory: Germán Andrés Ramos, PHDJuan David CarrilloNo ratings yet
- Control Engineering MT-353: Block Diagram ReductionDocument38 pagesControl Engineering MT-353: Block Diagram ReductionTahaKhanNo ratings yet
- Block Diagram AlgebraDocument27 pagesBlock Diagram Algebraearnest normanNo ratings yet
- Lecture 2 IIIDocument11 pagesLecture 2 IIIgks5kc8bhdNo ratings yet
- Linear Control SystemsDocument76 pagesLinear Control SystemsKamran TariqNo ratings yet
- Block Diagram AlgebraDocument28 pagesBlock Diagram AlgebraSirshenduNo ratings yet
- Transformations Transformations (Calculator)Document11 pagesTransformations Transformations (Calculator)Praggu SwarnkarNo ratings yet
- Tegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian ProsesDocument5 pagesTegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian ProsesTegarRochmad OddyPramantoNo ratings yet
- Block Diagram - TF - Steady State ErrorsDocument93 pagesBlock Diagram - TF - Steady State ErrorsTarek A-RNo ratings yet
- Block Diagram Representation of Control SystemsDocument49 pagesBlock Diagram Representation of Control Systemsdanish azhar100% (1)
- Microsoft Word - Block Diagram AlgebraDocument15 pagesMicrosoft Word - Block Diagram AlgebraShubhobrata RudraNo ratings yet
- Tegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian Proses-DikonversiDocument5 pagesTegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian Proses-DikonversiTegarRochmad OddyPramantoNo ratings yet
- EE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoDocument3 pagesEE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoAmal AhmedNo ratings yet
- Block Diagram AlgebraDocument16 pagesBlock Diagram AlgebraMirwana AirlinesNo ratings yet
- Lecture Notes (Dragged)Document1 pageLecture Notes (Dragged)yawas50511No ratings yet
- Lecture Notes (Dragged)Document1 pageLecture Notes (Dragged)yawas50511No ratings yet
- Block Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6Document5 pagesBlock Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6علي حسين علاوي ثوينيNo ratings yet
- Control 2 Lec4Document13 pagesControl 2 Lec4Ahmed YounisNo ratings yet
- D-Sampled SystemsDocument16 pagesD-Sampled Systemsbbb bbbNo ratings yet
- Teoría de Control: Hector Villacorta Hector - Villacorta@upa - Edu.mxDocument14 pagesTeoría de Control: Hector Villacorta Hector - Villacorta@upa - Edu.mxdaniela martinezNo ratings yet
- Solution Assignment 3Document7 pagesSolution Assignment 3sushant sharmaNo ratings yet
- Feedback Control Systems (FCS)Document71 pagesFeedback Control Systems (FCS)Ann RazonNo ratings yet
- Frequency ResponseDocument62 pagesFrequency ResponseSujin PrajapatiNo ratings yet
- Feedback Control LectureDocument16 pagesFeedback Control LecturepierrefreNo ratings yet
- Lecture 5 Block Diagram Representation of Control Systems PDFDocument60 pagesLecture 5 Block Diagram Representation of Control Systems PDFNicole Anne BorromeoNo ratings yet
- Lec5 Wavelets and Multiresolution AnalysisDocument55 pagesLec5 Wavelets and Multiresolution AnalysisRitunjay GuptaNo ratings yet
- Lecture - 2 Block Signal FlowDocument77 pagesLecture - 2 Block Signal Flowkibwe anthoNo ratings yet
- EE351Chap3-2.0 - Transfer FTN & SFGsDocument19 pagesEE351Chap3-2.0 - Transfer FTN & SFGsSardar Hamid ullahNo ratings yet
- Exercises 05 Block Diagram ReductionDocument3 pagesExercises 05 Block Diagram ReductionKabo MphanyaneNo ratings yet
- Lecture 2-Block Diagram Reduction TechniquesDocument71 pagesLecture 2-Block Diagram Reduction TechniquesNoor AhmedNo ratings yet
- Chapter3 2Document12 pagesChapter3 2hailegebreselassie24No ratings yet
- FOC Lect5 FeedbackDocument16 pagesFOC Lect5 FeedbackErhan ÖZNo ratings yet
- 2024 H2 CH 6 Transformations of Graph Notes (Teacher)Document31 pages2024 H2 CH 6 Transformations of Graph Notes (Teacher)hoatuyetha23No ratings yet
- Block Diagram Reduction MethodsDocument70 pagesBlock Diagram Reduction MethodsMuhammad Ahmad AliNo ratings yet
- DC Analysis: and Discuss Solution TechniquesDocument27 pagesDC Analysis: and Discuss Solution Techniquesx moodNo ratings yet
- Textbook Representations of Finite Groups I Math 240A Robert Boltje Ebook All Chapter PDFDocument53 pagesTextbook Representations of Finite Groups I Math 240A Robert Boltje Ebook All Chapter PDFroland.williams573100% (6)
- Unit1 Block DiagramDocument75 pagesUnit1 Block DiagramPrasidha PrabhuNo ratings yet
- Automatic Controls Systems Assignment 2Document7 pagesAutomatic Controls Systems Assignment 2romesaali23No ratings yet
- Chapter+5 SFGDocument31 pagesChapter+5 SFGengrkumailabbasNo ratings yet
- Chapter 3 Control System Representation: 3-1 IntroductionDocument16 pagesChapter 3 Control System Representation: 3-1 Introductionoptimus_prime1No ratings yet
- F 14 M 240 AnotesDocument94 pagesF 14 M 240 AnotesSweta AkhoriNo ratings yet
- Feedback Control Systems: Lecture Notes-12/12Document10 pagesFeedback Control Systems: Lecture Notes-12/12Aastha SinghNo ratings yet
- Review Exercises For Midterm Exam - Semester221Document2 pagesReview Exercises For Midterm Exam - Semester221Kanekii HaiseNo ratings yet
- Wavelets and Multi-Resolution ProcessingDocument31 pagesWavelets and Multi-Resolution ProcessingsrichitsNo ratings yet
- DKE344 BibDocument2 pagesDKE344 BibMohamad SleimanNo ratings yet
- Ghinea Gabriela Nouella and Manea Madalina ElenaDocument25 pagesGhinea Gabriela Nouella and Manea Madalina ElenaAlexandria Firdaus Al-farisyNo ratings yet
- Atlas Engineering Bar Handbook Rev Jan 2005-Oct 2011Document136 pagesAtlas Engineering Bar Handbook Rev Jan 2005-Oct 2011carlosc19715043No ratings yet
- BenfordDocument9 pagesBenfordAlex MireniucNo ratings yet
- 3987 SDS (GHS) - I-ChemDocument4 pages3987 SDS (GHS) - I-ChemAmirHakimRusliNo ratings yet
- Models in The Research ProcessDocument7 pagesModels in The Research ProcesskumarNo ratings yet
- The Effect of Emotional Freedom Technique On Stress and Anxiety in Nursing StudentsDocument119 pagesThe Effect of Emotional Freedom Technique On Stress and Anxiety in Nursing StudentsnguyenhabkNo ratings yet
- Mafia Ii 360 Download Manual EngDocument21 pagesMafia Ii 360 Download Manual EngJuan Camilo Payan GuerreroNo ratings yet
- Fizika RadiologijaDocument9 pagesFizika RadiologijaBorislav TapavičkiNo ratings yet
- 1 IntroductionDocument28 pages1 Introductionkevnnicl921216No ratings yet
- Versatile, Efficient and Easy-To-Use Visual Imu-Rtk: Surveying & EngineeringDocument4 pagesVersatile, Efficient and Easy-To-Use Visual Imu-Rtk: Surveying & EngineeringMohanad MHPSNo ratings yet
- Progress in The Development of A Reynolds-Stress Turbulence ClosureDocument30 pagesProgress in The Development of A Reynolds-Stress Turbulence ClosureMutiaRezaNo ratings yet
- SOAL MID TERM ENGLISH 13 Tyad 1Document6 pagesSOAL MID TERM ENGLISH 13 Tyad 1ani julitaNo ratings yet
- Gr11 Mock Exam Schedule 2024Document13 pagesGr11 Mock Exam Schedule 2024potrillo0330No ratings yet
- D197-Lab Exercise 2.2 - Bihay and SumaljagDocument5 pagesD197-Lab Exercise 2.2 - Bihay and Sumaljagjelly bihayNo ratings yet
- COOKERY 9 Q3.Mod1Document5 pagesCOOKERY 9 Q3.Mod1Jessel Mejia Onza100% (4)
- 5 6Document3 pages5 6Giorgi VasadzeNo ratings yet
- Prist University, Trichy Campus Department of Comnputer Science and Engineering B.Tech - Arrear Details (Part Time)Document2 pagesPrist University, Trichy Campus Department of Comnputer Science and Engineering B.Tech - Arrear Details (Part Time)diltvkNo ratings yet
- Low Voltage Current and Voltage Transformers PDFDocument260 pagesLow Voltage Current and Voltage Transformers PDFGustavo GamezNo ratings yet
- Chapter 04Document37 pagesChapter 04BLESSEDNo ratings yet
- Housekeeping Operation: Housekeeping Inventories: Par LevelsDocument7 pagesHousekeeping Operation: Housekeeping Inventories: Par LevelsGarnett Airah Valdez AlejoNo ratings yet
- Electrical Specification PDFDocument235 pagesElectrical Specification PDFMinhTrieu100% (1)























































































Download as pdf or txt
You might also like
- CleanTalk: 4 Ways of CommunicatingDocument26 pagesCleanTalk: 4 Ways of CommunicatingCatalin Octavian Blaga100% (1)
- Guided Notes - Production CurvesDocument7 pagesGuided Notes - Production CurvesyogurtkingyahooNo ratings yet
- August 14 - Sequencig Using Signal WordsDocument3 pagesAugust 14 - Sequencig Using Signal Wordsshe88% (8)
- Q3 G11 Physical Science Module 7Document19 pagesQ3 G11 Physical Science Module 7Lebz RicaramNo ratings yet
- Job Order CostingDocument49 pagesJob Order CostingKuroko71% (7)
- A Smart Motor Controller For E-Bike Applications PDFDocument4 pagesA Smart Motor Controller For E-Bike Applications PDFaungwinnaing100% (1)
- CH 5 Test BankDocument75 pagesCH 5 Test BankJB50% (2)
- 5 Block Diagram Representation of LTI Systems: U (T) G(S) y (T)Document3 pages5 Block Diagram Representation of LTI Systems: U (T) G(S) y (T)Yassine DjillaliNo ratings yet
- Modern Control Engineering: System's RepresentationDocument30 pagesModern Control Engineering: System's RepresentationBrooklynPrinceNo ratings yet
- T FN, Pole-Zeros, Block Diagram & SFGDocument28 pagesT FN, Pole-Zeros, Block Diagram & SFGArsal AslamNo ratings yet
- Control5 2020 Block Diagram ManipulationDocument20 pagesControl5 2020 Block Diagram ManipulationKhong JunYonGNo ratings yet
- Notes 4Document13 pagesNotes 4lili aboudNo ratings yet
- L4 1st 2nd Order CharacteristicsDocument28 pagesL4 1st 2nd Order Characteristicsalex carterNo ratings yet
- Lect 9 Overall Transfer Function of A Closed-Loop Control SystemDocument8 pagesLect 9 Overall Transfer Function of A Closed-Loop Control SystemZaidoon MohsinNo ratings yet
- Chapter 3Document37 pagesChapter 3Izzat AiresNo ratings yet
- Updated Chapter 2 Control Systems Lecture NotesDocument22 pagesUpdated Chapter 2 Control Systems Lecture Notesvijay rajNo ratings yet
- Frequency Response Method (Continue)Document37 pagesFrequency Response Method (Continue)Edo SunardyNo ratings yet
- SolutionDocument6 pagesSolutionMihir Kumar MechNo ratings yet
- Topic06 ReviewedDocument4 pagesTopic06 Reviewedsuper junlinNo ratings yet
- Bode Plot PresentationDocument48 pagesBode Plot PresentationJulcemar CapellaroNo ratings yet
- Control Theory: Germán Andrés Ramos, PHDDocument45 pagesControl Theory: Germán Andrés Ramos, PHDJuan David CarrilloNo ratings yet
- Control Engineering MT-353: Block Diagram ReductionDocument38 pagesControl Engineering MT-353: Block Diagram ReductionTahaKhanNo ratings yet
- Block Diagram AlgebraDocument27 pagesBlock Diagram Algebraearnest normanNo ratings yet
- Lecture 2 IIIDocument11 pagesLecture 2 IIIgks5kc8bhdNo ratings yet
- Linear Control SystemsDocument76 pagesLinear Control SystemsKamran TariqNo ratings yet
- Block Diagram AlgebraDocument28 pagesBlock Diagram AlgebraSirshenduNo ratings yet
- Transformations Transformations (Calculator)Document11 pagesTransformations Transformations (Calculator)Praggu SwarnkarNo ratings yet
- Tegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian ProsesDocument5 pagesTegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian ProsesTegarRochmad OddyPramantoNo ratings yet
- Block Diagram - TF - Steady State ErrorsDocument93 pagesBlock Diagram - TF - Steady State ErrorsTarek A-RNo ratings yet
- Block Diagram Representation of Control SystemsDocument49 pagesBlock Diagram Representation of Control Systemsdanish azhar100% (1)
- Microsoft Word - Block Diagram AlgebraDocument15 pagesMicrosoft Word - Block Diagram AlgebraShubhobrata RudraNo ratings yet
- Tegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian Proses-DikonversiDocument5 pagesTegar Rochmad Oddy Pramanto - Tugas Bab 7 Pengendalian Proses-DikonversiTegarRochmad OddyPramantoNo ratings yet
- EE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoDocument3 pagesEE 371 Control Systems Exam II, Spring 1997 Solution: Ee Dept. Univ. of Nevada, RenoAmal AhmedNo ratings yet
- Block Diagram AlgebraDocument16 pagesBlock Diagram AlgebraMirwana AirlinesNo ratings yet
- Lecture Notes (Dragged)Document1 pageLecture Notes (Dragged)yawas50511No ratings yet
- Lecture Notes (Dragged)Document1 pageLecture Notes (Dragged)yawas50511No ratings yet
- Block Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6Document5 pagesBlock Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6علي حسين علاوي ثوينيNo ratings yet
- Control 2 Lec4Document13 pagesControl 2 Lec4Ahmed YounisNo ratings yet
- D-Sampled SystemsDocument16 pagesD-Sampled Systemsbbb bbbNo ratings yet
- Teoría de Control: Hector Villacorta Hector - Villacorta@upa - Edu.mxDocument14 pagesTeoría de Control: Hector Villacorta Hector - Villacorta@upa - Edu.mxdaniela martinezNo ratings yet
- Solution Assignment 3Document7 pagesSolution Assignment 3sushant sharmaNo ratings yet
- Feedback Control Systems (FCS)Document71 pagesFeedback Control Systems (FCS)Ann RazonNo ratings yet
- Frequency ResponseDocument62 pagesFrequency ResponseSujin PrajapatiNo ratings yet
- Feedback Control LectureDocument16 pagesFeedback Control LecturepierrefreNo ratings yet
- Lecture 5 Block Diagram Representation of Control Systems PDFDocument60 pagesLecture 5 Block Diagram Representation of Control Systems PDFNicole Anne BorromeoNo ratings yet
- Lec5 Wavelets and Multiresolution AnalysisDocument55 pagesLec5 Wavelets and Multiresolution AnalysisRitunjay GuptaNo ratings yet
- Lecture - 2 Block Signal FlowDocument77 pagesLecture - 2 Block Signal Flowkibwe anthoNo ratings yet
- EE351Chap3-2.0 - Transfer FTN & SFGsDocument19 pagesEE351Chap3-2.0 - Transfer FTN & SFGsSardar Hamid ullahNo ratings yet
- Exercises 05 Block Diagram ReductionDocument3 pagesExercises 05 Block Diagram ReductionKabo MphanyaneNo ratings yet
- Lecture 2-Block Diagram Reduction TechniquesDocument71 pagesLecture 2-Block Diagram Reduction TechniquesNoor AhmedNo ratings yet
- Chapter3 2Document12 pagesChapter3 2hailegebreselassie24No ratings yet
- FOC Lect5 FeedbackDocument16 pagesFOC Lect5 FeedbackErhan ÖZNo ratings yet
- 2024 H2 CH 6 Transformations of Graph Notes (Teacher)Document31 pages2024 H2 CH 6 Transformations of Graph Notes (Teacher)hoatuyetha23No ratings yet
- Block Diagram Reduction MethodsDocument70 pagesBlock Diagram Reduction MethodsMuhammad Ahmad AliNo ratings yet
- DC Analysis: and Discuss Solution TechniquesDocument27 pagesDC Analysis: and Discuss Solution Techniquesx moodNo ratings yet
- Textbook Representations of Finite Groups I Math 240A Robert Boltje Ebook All Chapter PDFDocument53 pagesTextbook Representations of Finite Groups I Math 240A Robert Boltje Ebook All Chapter PDFroland.williams573100% (6)
- Unit1 Block DiagramDocument75 pagesUnit1 Block DiagramPrasidha PrabhuNo ratings yet
- Automatic Controls Systems Assignment 2Document7 pagesAutomatic Controls Systems Assignment 2romesaali23No ratings yet
- Chapter+5 SFGDocument31 pagesChapter+5 SFGengrkumailabbasNo ratings yet
- Chapter 3 Control System Representation: 3-1 IntroductionDocument16 pagesChapter 3 Control System Representation: 3-1 Introductionoptimus_prime1No ratings yet
- F 14 M 240 AnotesDocument94 pagesF 14 M 240 AnotesSweta AkhoriNo ratings yet
- Feedback Control Systems: Lecture Notes-12/12Document10 pagesFeedback Control Systems: Lecture Notes-12/12Aastha SinghNo ratings yet
- Review Exercises For Midterm Exam - Semester221Document2 pagesReview Exercises For Midterm Exam - Semester221Kanekii HaiseNo ratings yet
- Wavelets and Multi-Resolution ProcessingDocument31 pagesWavelets and Multi-Resolution ProcessingsrichitsNo ratings yet
- DKE344 BibDocument2 pagesDKE344 BibMohamad SleimanNo ratings yet
- Ghinea Gabriela Nouella and Manea Madalina ElenaDocument25 pagesGhinea Gabriela Nouella and Manea Madalina ElenaAlexandria Firdaus Al-farisyNo ratings yet
- Atlas Engineering Bar Handbook Rev Jan 2005-Oct 2011Document136 pagesAtlas Engineering Bar Handbook Rev Jan 2005-Oct 2011carlosc19715043No ratings yet
- BenfordDocument9 pagesBenfordAlex MireniucNo ratings yet
- 3987 SDS (GHS) - I-ChemDocument4 pages3987 SDS (GHS) - I-ChemAmirHakimRusliNo ratings yet
- Models in The Research ProcessDocument7 pagesModels in The Research ProcesskumarNo ratings yet
- The Effect of Emotional Freedom Technique On Stress and Anxiety in Nursing StudentsDocument119 pagesThe Effect of Emotional Freedom Technique On Stress and Anxiety in Nursing StudentsnguyenhabkNo ratings yet
- Mafia Ii 360 Download Manual EngDocument21 pagesMafia Ii 360 Download Manual EngJuan Camilo Payan GuerreroNo ratings yet
- Fizika RadiologijaDocument9 pagesFizika RadiologijaBorislav TapavičkiNo ratings yet
- 1 IntroductionDocument28 pages1 Introductionkevnnicl921216No ratings yet
- Versatile, Efficient and Easy-To-Use Visual Imu-Rtk: Surveying & EngineeringDocument4 pagesVersatile, Efficient and Easy-To-Use Visual Imu-Rtk: Surveying & EngineeringMohanad MHPSNo ratings yet
- Progress in The Development of A Reynolds-Stress Turbulence ClosureDocument30 pagesProgress in The Development of A Reynolds-Stress Turbulence ClosureMutiaRezaNo ratings yet
- SOAL MID TERM ENGLISH 13 Tyad 1Document6 pagesSOAL MID TERM ENGLISH 13 Tyad 1ani julitaNo ratings yet
- Gr11 Mock Exam Schedule 2024Document13 pagesGr11 Mock Exam Schedule 2024potrillo0330No ratings yet
- D197-Lab Exercise 2.2 - Bihay and SumaljagDocument5 pagesD197-Lab Exercise 2.2 - Bihay and Sumaljagjelly bihayNo ratings yet
- COOKERY 9 Q3.Mod1Document5 pagesCOOKERY 9 Q3.Mod1Jessel Mejia Onza100% (4)
- 5 6Document3 pages5 6Giorgi VasadzeNo ratings yet
- Prist University, Trichy Campus Department of Comnputer Science and Engineering B.Tech - Arrear Details (Part Time)Document2 pagesPrist University, Trichy Campus Department of Comnputer Science and Engineering B.Tech - Arrear Details (Part Time)diltvkNo ratings yet
- Low Voltage Current and Voltage Transformers PDFDocument260 pagesLow Voltage Current and Voltage Transformers PDFGustavo GamezNo ratings yet
- Chapter 04Document37 pagesChapter 04BLESSEDNo ratings yet
- Housekeeping Operation: Housekeeping Inventories: Par LevelsDocument7 pagesHousekeeping Operation: Housekeeping Inventories: Par LevelsGarnett Airah Valdez AlejoNo ratings yet
- Electrical Specification PDFDocument235 pagesElectrical Specification PDFMinhTrieu100% (1)