Download as pdf or txt
You might also like
- Microprocessors 8086 (Notes)Document29 pagesMicroprocessors 8086 (Notes)Aravindha BhatNo ratings yet
- Presentation On Single Phase Grid Connected Rooftop Integrated Solar SystemDocument28 pagesPresentation On Single Phase Grid Connected Rooftop Integrated Solar SystemmonaNo ratings yet
- Chapter 2 Basic Architecture of The 8088 and 8086 MicroprocessorsDocument6 pagesChapter 2 Basic Architecture of The 8088 and 8086 MicroprocessorsNugusa AberaNo ratings yet
- UNIT-3 MP NotesDocument21 pagesUNIT-3 MP Notesvansh tyagiNo ratings yet
- Unit-1,2,3 MP&MC NotesDocument25 pagesUnit-1,2,3 MP&MC NotesHyma Prasad GelliNo ratings yet
- 8086-Handout For Chapter OneDocument8 pages8086-Handout For Chapter OneHami Yehuala ManNo ratings yet
- Chapter 2Document25 pagesChapter 2tariku fkaduNo ratings yet
- 8086 Notes NITW2020Document76 pages8086 Notes NITW2020ka21ecb0f27No ratings yet
- Intel Microprocessor 8086: Salient FeaturesDocument9 pagesIntel Microprocessor 8086: Salient FeaturesTol Man ShresthaNo ratings yet
- Intel8086microprocessor 140901003952 Phpapp02Document9 pagesIntel8086microprocessor 140901003952 Phpapp02dz15dzNo ratings yet
- Unit 1&3Document18 pagesUnit 1&3Sreekanth PagadapalliNo ratings yet
- 16 Bit Microprocessor 8086Document11 pages16 Bit Microprocessor 8086Yogesh KuteNo ratings yet
- Module 1Document79 pagesModule 1Remya RaveendranNo ratings yet
- MPMC (Unit 02) Part 01Document101 pagesMPMC (Unit 02) Part 01bovas.biju2021No ratings yet
- Architecture of 8086 Microprocessor: Microprocessors LabDocument7 pagesArchitecture of 8086 Microprocessor: Microprocessors LabljjbNo ratings yet
- Chapter 3 (Part III) - The 8086 MicroprocessorDocument34 pagesChapter 3 (Part III) - The 8086 MicroprocessorKirubel EsayasNo ratings yet
- Mpi Unit 1Document22 pagesMpi Unit 1sree ramyaNo ratings yet
- 8086 ArchitectureDocument19 pages8086 Architectureasmit guptaNo ratings yet
- YMCA - BC - MP (Wk2)Document67 pagesYMCA - BC - MP (Wk2)harshiiitj9070No ratings yet
- Ec8691 Microprocessors and Microcontroller 366672282 MPMC 5unitDocument229 pagesEc8691 Microprocessors and Microcontroller 366672282 MPMC 5unitjeniferNo ratings yet
- Serial CommunicationDocument28 pagesSerial CommunicationSanduni100% (1)
- Organization of Intel 8086Document10 pagesOrganization of Intel 8086Ashok ChakriNo ratings yet
- Internal Architecture of 8086: Intel 8086 Assembly Language ProgrammingDocument4 pagesInternal Architecture of 8086: Intel 8086 Assembly Language ProgrammingAparnaaNo ratings yet
- Architecture of 8086Document4 pagesArchitecture of 8086sree ramyaNo ratings yet
- 8086 Microprocessor CheatsheetDocument17 pages8086 Microprocessor Cheatsheetdz15dzNo ratings yet
- 8086 Architecture: 8086 FeaturesDocument26 pages8086 Architecture: 8086 FeaturesVedhaVyas MahasivaNo ratings yet
- Week 3Document1 pageWeek 3HAITOF BADR-EDDINENo ratings yet
- Module 1Document79 pagesModule 1Remya RaveendranNo ratings yet
- 8086 ArchitectureDocument7 pages8086 Architectureshahid aliNo ratings yet
- Ec 8691-Microprocessors and Microcontrollers: Prepared by N.Beaula Ap/Ece ACEW, ManavilaiDocument39 pagesEc 8691-Microprocessors and Microcontrollers: Prepared by N.Beaula Ap/Ece ACEW, ManavilaibeaulajenishNo ratings yet
- Arche of 8086Document9 pagesArche of 8086MOHAMMED ASLAM CNo ratings yet
- Amp Module 1Document14 pagesAmp Module 1fasnamditNo ratings yet
- 3 Microprocessor 8086Document27 pages3 Microprocessor 8086Munazza FatmaNo ratings yet
- Unit-I (Architecture of 8086)Document23 pagesUnit-I (Architecture of 8086)Gouse MaahiNo ratings yet
- Register Organization of 8086 PDFDocument10 pagesRegister Organization of 8086 PDFDevikaNo ratings yet
- 8086 Architecture RNMDocument53 pages8086 Architecture RNM30 Om GhugareNo ratings yet
- MTE-605 Assingment2 ProcessorDocument6 pagesMTE-605 Assingment2 ProcessorAeronautical EngineerNo ratings yet
- MP Sec.B.1Document33 pagesMP Sec.B.1Girish AroraNo ratings yet
- MP - Lec 02 - The Microprocessor and Its ArchitectureDocument40 pagesMP - Lec 02 - The Microprocessor and Its ArchitectureuabdulgwadNo ratings yet
- Microprocessors and MicrocomputersDocument5 pagesMicroprocessors and MicrocomputersAndreas Pitziolis100% (1)
- MP Module 1 - ModifiedDocument15 pagesMP Module 1 - Modifiedakhil krishnanNo ratings yet
- MPMC - Notes T ApparaoDocument105 pagesMPMC - Notes T ApparaoMurthyNo ratings yet
- Buses and Operation: Max Mode. The Former Was Intended For Small Single Processor Systems While The LatterDocument2 pagesBuses and Operation: Max Mode. The Former Was Intended For Small Single Processor Systems While The LatterKim OabeNo ratings yet
- MicroprocessorDocument131 pagesMicroprocessorYousuf MohammadNo ratings yet
- Microprocessor Unit-1 PART ADocument12 pagesMicroprocessor Unit-1 PART ASasi BhushanNo ratings yet
- 8086 MicroprocessorDocument25 pages8086 Microprocessorابن اليمنNo ratings yet
- Significance of QueueDocument6 pagesSignificance of QueueJun Alfred Alba100% (1)
- Micro 8086Document119 pagesMicro 8086Md Fairuz SiddiqueeNo ratings yet
- Microprocessor and MicrocontrollerDocument1 pageMicroprocessor and MicrocontrollerJitendraNo ratings yet
- 8086 Architecture Addressing ModesDocument10 pages8086 Architecture Addressing ModesKumaran GNo ratings yet
- 8086 Full Full Notes of MicroprocessorDocument75 pages8086 Full Full Notes of MicroprocessorFired BoyNo ratings yet
- Lec Architecture 8086Document30 pagesLec Architecture 8086Abir RahmanNo ratings yet
- Programming Model of 8086Document4 pagesProgramming Model of 8086Prince VegetaNo ratings yet
- UNIT I 8086 Microprocessor Architecture and Register OrganizationDocument50 pagesUNIT I 8086 Microprocessor Architecture and Register Organizationsnehaupadhya20No ratings yet
- Ele 509 MMDocument31 pagesEle 509 MMashi.s300403No ratings yet
- Name: Umar Ali Roll#: 522 Class#: 5 Semester Submitted To: Sir Farhatullah Week: 06 Subject: Microprocessor and Assembly LanguageDocument6 pagesName: Umar Ali Roll#: 522 Class#: 5 Semester Submitted To: Sir Farhatullah Week: 06 Subject: Microprocessor and Assembly LanguageDil NawazNo ratings yet
- Registers: Register SetDocument4 pagesRegisters: Register SetNipenNo ratings yet
- Unit 6 Introduction of Advanced MicrtoprocessorDocument9 pagesUnit 6 Introduction of Advanced MicrtoprocessorMann MehtaNo ratings yet
- Microprocesser AssignmentDocument15 pagesMicroprocesser AssignmentMukul RanaNo ratings yet
- Intel 8086 Microprocessor ArchitectureDocument16 pagesIntel 8086 Microprocessor Architecturelu4rohitNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Presentation Title: Presenter Name and TitleDocument51 pagesPresentation Title: Presenter Name and TitleSeema ChauhanNo ratings yet
- Ku-Band Transceiver (1.5W) PDFDocument2 pagesKu-Band Transceiver (1.5W) PDFPundaleek KalloliNo ratings yet
- Encoders: 4 To 2 Line EncoderDocument40 pagesEncoders: 4 To 2 Line EncoderLovely VasanthNo ratings yet
- The Memory Blocks Are Mapped On To The Cache With The Help ofDocument26 pagesThe Memory Blocks Are Mapped On To The Cache With The Help ofSuchit KumarNo ratings yet
- ESPglobal Startup Operation ManualDocument3 pagesESPglobal Startup Operation ManualRonald LlerenaNo ratings yet
- Pricelist FTI MD (All Brand - Update February 2021Document18 pagesPricelist FTI MD (All Brand - Update February 2021Ayip ZaenudinNo ratings yet
- High Performance Computing: Sabah SayedDocument22 pagesHigh Performance Computing: Sabah SayedaliNo ratings yet
- Python Project ReportDocument14 pagesPython Project ReportaddssdfaNo ratings yet
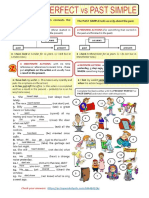
- Check Your Answers:: Haven't SleptDocument3 pagesCheck Your Answers:: Haven't SleptRosa Rivera PacoNo ratings yet
- 1009 DS PDFDocument22 pages1009 DS PDFdido fidoNo ratings yet
- Instructions Set of 8086Document63 pagesInstructions Set of 8086aymanaymanNo ratings yet
- Paper: Converting Hardware Management Console (HMC) 7042-CR6 or 7042-CR7 Models To RAID1Document16 pagesPaper: Converting Hardware Management Console (HMC) 7042-CR6 or 7042-CR7 Models To RAID1RidhoWicaksonoNo ratings yet
- UNIT 4 MemoryDocument13 pagesUNIT 4 MemorySANJAY NAYAKNo ratings yet
- IN OUT Fixed Address Variable AddressDocument13 pagesIN OUT Fixed Address Variable AddressMuhammad Usama IbrarNo ratings yet
- MCQ On Computer History PDFDocument3 pagesMCQ On Computer History PDFHamid Khan KhanNo ratings yet
- Semiconductor KTB688: Technical DataDocument3 pagesSemiconductor KTB688: Technical DataFlorian CiprianNo ratings yet
- GSM QuestionsDocument5 pagesGSM QuestionsDevanshu RastogiNo ratings yet
- Fangling Digital Control Incise Machine System Manual: (Model: F2100B)Document86 pagesFangling Digital Control Incise Machine System Manual: (Model: F2100B)Marco JaramilloNo ratings yet
- PDF Nec Pasolink TrainingDocument112 pagesPDF Nec Pasolink TrainingElson TBSNo ratings yet
- Ceragon RFU-C Product Description PDFDocument45 pagesCeragon RFU-C Product Description PDFEsteban Besso Pianetto100% (1)
- Lab 10 Transistor Switching CircuitsDocument3 pagesLab 10 Transistor Switching CircuitsUmar Ali BaigNo ratings yet
- OptiX RTN 950-1-1-2Document10 pagesOptiX RTN 950-1-1-2Raja SolaimalaiNo ratings yet
- Dicom Cs v3 5 r1Document79 pagesDicom Cs v3 5 r1Basheer AlmetwakelNo ratings yet
- 3 CM208G Microprocessor - CM208G (Edit) - NEWDocument8 pages3 CM208G Microprocessor - CM208G (Edit) - NEWMadiha QuaziNo ratings yet
- ESD & IOT SyllabusDocument4 pagesESD & IOT SyllabusShane LaraNo ratings yet
- Home-Constructed, Building Block Op-Amp Circuits For Analog Computers Inverting IntegratorDocument5 pagesHome-Constructed, Building Block Op-Amp Circuits For Analog Computers Inverting IntegratorMsuttonNo ratings yet
- Universal IC Programmer - Autoelectric TL866CSDocument7 pagesUniversal IC Programmer - Autoelectric TL866CSMuhammad ZahidNo ratings yet
- Almemo 2450eDocument32 pagesAlmemo 2450enaveenNo ratings yet
- Bpe MicroprojectDocument19 pagesBpe Microproject10 Durvesh PathakNo ratings yet