Download as pdf or txt
You might also like
- Modeling and Advanced Control of Dual-Active-Bridge DCDC Converters A ReviewDocument24 pagesModeling and Advanced Control of Dual-Active-Bridge DCDC Converters A Reviewmiguel vivertNo ratings yet
- Multiple-Input Configuration of Isolated Bidirectional DCDC Converter For Power Flow Control in Combinational Battery StorageDocument10 pagesMultiple-Input Configuration of Isolated Bidirectional DCDC Converter For Power Flow Control in Combinational Battery StorageHsekum RamukNo ratings yet
- Power Converters, Control, and Energy Management For Distributed GenerationDocument5 pagesPower Converters, Control, and Energy Management For Distributed GenerationAbdelaziz IsmealNo ratings yet
- Analysis and Design of A Reconfigurable Rectifier Circuit For Wireless Power TransferDocument10 pagesAnalysis and Design of A Reconfigurable Rectifier Circuit For Wireless Power Transferhusam hamidNo ratings yet
- Bridgeless PushPull Resonant AC DC Converter Featuring Balanced Switching Loss DistributionDocument11 pagesBridgeless PushPull Resonant AC DC Converter Featuring Balanced Switching Loss Distribution하미드라힘No ratings yet
- Closed Sepic1Document6 pagesClosed Sepic1Thimothy BasavaNo ratings yet
- A Reduced Switching Loss Technique Based On Generalized Scalar PWM For Nine-Switch InvertersDocument11 pagesA Reduced Switching Loss Technique Based On Generalized Scalar PWM For Nine-Switch InvertersIamIam If IamNotNo ratings yet
- A Two-Phase Interleaved Bidirectional DC-DC Converter With Asymmetrical Duty Limit Control For Wide-Range DC-Bus Voltage ApplicationsDocument16 pagesA Two-Phase Interleaved Bidirectional DC-DC Converter With Asymmetrical Duty Limit Control For Wide-Range DC-Bus Voltage Applications賴慶明No ratings yet
- Novel Four-Port DC-DC Converter For InterfacingSolar PV-Fuel Cell Hybrid Sources WithLow-Voltage Bipolar DC MicrogridsDocument11 pagesNovel Four-Port DC-DC Converter For InterfacingSolar PV-Fuel Cell Hybrid Sources WithLow-Voltage Bipolar DC MicrogridsHema ChanderNo ratings yet
- State of The Art DC-DC Converter Topologies For The Multi-Terminal DC Grid Applications: A ReviewDocument7 pagesState of The Art DC-DC Converter Topologies For The Multi-Terminal DC Grid Applications: A ReviewariphineNo ratings yet
- Deepika PDFDocument10 pagesDeepika PDFraghuaadsNo ratings yet
- Deepika PDFDocument10 pagesDeepika PDFraghuaadsNo ratings yet
- Wide Input Power Range X - Band Rectifier With Dynamic Capacitive Self-CompensationDocument4 pagesWide Input Power Range X - Band Rectifier With Dynamic Capacitive Self-Compensationsaeed gholamiNo ratings yet
- A Modified DC Power Electronic TransformerDocument15 pagesA Modified DC Power Electronic TransformerArun KumarNo ratings yet
- IEEE - AHighStep-DownDC-DCConverterwithR CurrentRippleandLowVoltageStress1Document14 pagesIEEE - AHighStep-DownDC-DCConverterwithR CurrentRippleandLowVoltageStress1rakeshee2007No ratings yet
- Active Power and DC Voltage Coordinative Control For Cascaded DC-AC Converter With Bidirectional Power ApplicationDocument15 pagesActive Power and DC Voltage Coordinative Control For Cascaded DC-AC Converter With Bidirectional Power Applicationragnar blackNo ratings yet
- High-Conversion-Ratio Isolated Bidirectional DCDC Converter For Distributed Energy Storage SystemsDocument22 pagesHigh-Conversion-Ratio Isolated Bidirectional DCDC Converter For Distributed Energy Storage SystemsHsekum Ramuk100% (1)
- Large Step Ratio Input-Series-Output-Parallel Chain-Link DC-DC ConverterDocument12 pagesLarge Step Ratio Input-Series-Output-Parallel Chain-Link DC-DC ConverterArunavaNo ratings yet
- Variable-Switching-Frequency Single-Stage Bidirectional GaN ACDC Converter For The Grid-Tied Battery Energy Storage SystemDocument11 pagesVariable-Switching-Frequency Single-Stage Bidirectional GaN ACDC Converter For The Grid-Tied Battery Energy Storage Systemy87387218No ratings yet
- Novel Isolated Bidirectional Interleaved ConverterDocument10 pagesNovel Isolated Bidirectional Interleaved ConverterHsekum RamukNo ratings yet
- A New Single-Input Dual-Output DC-DC Converter Modelled UsingDocument29 pagesA New Single-Input Dual-Output DC-DC Converter Modelled Usingvino drenNo ratings yet
- A Monopolar Symmetrical Hybrid Cascaded DC/DC Converter For HVDC InterconnectionsDocument15 pagesA Monopolar Symmetrical Hybrid Cascaded DC/DC Converter For HVDC InterconnectionsArifin WibisonoNo ratings yet
- A Wide-PCE-Dynamic-Range CMOS Cross-Coupled Differential-Drive Rectifier For Ambient RF Energy HarvestingDocument5 pagesA Wide-PCE-Dynamic-Range CMOS Cross-Coupled Differential-Drive Rectifier For Ambient RF Energy Harvestinghusam hamidNo ratings yet
- PSFB EnglishDocument8 pagesPSFB EnglishManal CherifNo ratings yet
- A Wireless Power Transfer System With Inverse Coupled Current Doubler Rectifier For High-Output Current ApplicationsDocument10 pagesA Wireless Power Transfer System With Inverse Coupled Current Doubler Rectifier For High-Output Current Applicationsmeenujataj469481No ratings yet
- Project SynopsisDocument13 pagesProject SynopsisKarthik SDNo ratings yet
- Low-Power SAR ADC Design Overview and Survey of State-of-the-Art TechniquesDocument14 pagesLow-Power SAR ADC Design Overview and Survey of State-of-the-Art TechniquesyeiaNo ratings yet
- Karami 2020Document10 pagesKarami 2020mohammad omarNo ratings yet
- Research On Loss Reduction of Dual Active Bridge Converter Over Wide Load Range For Solid State Transformer ApplicationDocument9 pagesResearch On Loss Reduction of Dual Active Bridge Converter Over Wide Load Range For Solid State Transformer ApplicationvitpowerguyNo ratings yet
- 10 1016@j Isatra 2020 05 015 PDFDocument16 pages10 1016@j Isatra 2020 05 015 PDFFarid KhouchaNo ratings yet
- An Ultra-Low Quiescent Current Tri-Mode DC-DC Buck Converter With 92.1 Peak Efficiency For IoT ApplicationsDocument12 pagesAn Ultra-Low Quiescent Current Tri-Mode DC-DC Buck Converter With 92.1 Peak Efficiency For IoT ApplicationsRAJANo ratings yet
- Multiport Interline Current Flow Controller For Meshed HVDC GridsDocument12 pagesMultiport Interline Current Flow Controller For Meshed HVDC Gridsshubhangi bhadoriaNo ratings yet
- Distributed Predictive Secondary Control For Imbalance Sharing in AC MicrogridsDocument18 pagesDistributed Predictive Secondary Control For Imbalance Sharing in AC Microgridsnaga_rajNo ratings yet
- Bidirectional DC To DC Converters: An Overview of Various Topologies, Switching Schemes and Control TechniquesDocument6 pagesBidirectional DC To DC Converters: An Overview of Various Topologies, Switching Schemes and Control TechniquesVo Thanh TungNo ratings yet
- Robust LMI-LQR Control For Dual-Active-Bridge DC-DC Converters With High Parameter UncertaintiesDocument15 pagesRobust LMI-LQR Control For Dual-Active-Bridge DC-DC Converters With High Parameter UncertaintiesMuhammad NazeerNo ratings yet
- Pilawa Sub-Module TPELSDocument11 pagesPilawa Sub-Module TPELSSubhadip ChakrabortyNo ratings yet
- Design of A High E Ciency 30 KW Boost Composite ConverterDocument8 pagesDesign of A High E Ciency 30 KW Boost Composite ConverterGVNo ratings yet
- An Improved DC-DC Boost Converter For Energy HarveDocument10 pagesAn Improved DC-DC Boost Converter For Energy HarveTuấn Nguyễn VănNo ratings yet
- A New Hybrid Boosting Converter For Renewable Energy ApplicationsDocument13 pagesA New Hybrid Boosting Converter For Renewable Energy ApplicationsahmedNo ratings yet
- 11 - 2023 - Low-Loss and Compact Hybrid DC Circuit Breaker Scheme Using Self-Commutated Semiconductor Switch ModuleDocument9 pages11 - 2023 - Low-Loss and Compact Hybrid DC Circuit Breaker Scheme Using Self-Commutated Semiconductor Switch ModuleAdam AlivinoNo ratings yet
- Battery Charging PDFDocument15 pagesBattery Charging PDFTamjid KabirNo ratings yet
- Design Optimization of A High Step-Up DC-DC Converter For Photovoltaic MicroinvertersDocument6 pagesDesign Optimization of A High Step-Up DC-DC Converter For Photovoltaic MicroinvertersAlba RamirezNo ratings yet
- Reciprocating Connection of Dual Active Bridge DCDC Converter With PV Integration. GhanshamDocument7 pagesReciprocating Connection of Dual Active Bridge DCDC Converter With PV Integration. Ghanshammohammed bawazeerNo ratings yet
- Strategies For Power/Energy Saving in Distribution Networks: Gheorghe GRIGORAS, Gheorghe CARTINA, Elena-Crenguta BOBRICDocument4 pagesStrategies For Power/Energy Saving in Distribution Networks: Gheorghe GRIGORAS, Gheorghe CARTINA, Elena-Crenguta BOBRICivanramljakNo ratings yet
- A Distributed Filter Within A Switching Converter For Application To 3-D Integrated CircuitsDocument11 pagesA Distributed Filter Within A Switching Converter For Application To 3-D Integrated CircuitsDaniel zanelattoNo ratings yet
- A Hybrid Modular DC/DC Converter For HVDC ApplicationsDocument13 pagesA Hybrid Modular DC/DC Converter For HVDC ApplicationsariphineNo ratings yet
- A Grid Interface Current Control Strategy For DC MicrogridsDocument8 pagesA Grid Interface Current Control Strategy For DC MicrogridsPradeep Kumar SahuNo ratings yet
- Common-Ground-Type Five-Level Transformerless Inverter Topology With Full DC-Bus UtilizationDocument10 pagesCommon-Ground-Type Five-Level Transformerless Inverter Topology With Full DC-Bus Utilizationrajeev ranjanNo ratings yet
- An Extendable Interleaved Quasi Z-Source High Step-Up DCDC ConverterDocument12 pagesAn Extendable Interleaved Quasi Z-Source High Step-Up DCDC Converterwinkavi87No ratings yet
- Steady-State and Dynamic Input Current LF Ripple Evaluation and Reduction in Two Stage Single Phase Inverter With Back Current GainDocument14 pagesSteady-State and Dynamic Input Current LF Ripple Evaluation and Reduction in Two Stage Single Phase Inverter With Back Current GainGladiolus TranNo ratings yet
- Comparison of DAB and LLC DC-DC Converters in High-Step-Down Fixed-Conversion-Ratio (DCX) ApplicationsDocument16 pagesComparison of DAB and LLC DC-DC Converters in High-Step-Down Fixed-Conversion-Ratio (DCX) ApplicationsJAHANGEER AHMADNo ratings yet
- 1 s2.0 S0142061523004568 MainDocument10 pages1 s2.0 S0142061523004568 MainMinh Tạ ĐứcNo ratings yet
- High Step-Down Nonisolated DCDC Converter With Coupled InductorsDocument8 pagesHigh Step-Down Nonisolated DCDC Converter With Coupled InductorsAkobir KamolovNo ratings yet
- A Novel Accurate Adaptive Constant On-Time Buck Converter For A Wide-Range OperationDocument11 pagesA Novel Accurate Adaptive Constant On-Time Buck Converter For A Wide-Range OperationzzhbpainNo ratings yet
- Nonisolated DCDC Converters With Wide Conversion Range For High-Power ApplicationsDocument12 pagesNonisolated DCDC Converters With Wide Conversion Range For High-Power Applicationsjucyara_No ratings yet
- IET Power Electronics - 2020 - Dur N - Configurations of DC DC Converters of One Input and Multiple Outputs WithoutDocument13 pagesIET Power Electronics - 2020 - Dur N - Configurations of DC DC Converters of One Input and Multiple Outputs WithoutREYES APOLONIO CASTRO CORRALNo ratings yet
- Five-Level Transformerless Inverter For Single-Phase Solar Photovoltaic ApplicationsDocument12 pagesFive-Level Transformerless Inverter For Single-Phase Solar Photovoltaic Applicationsrajeev ranjanNo ratings yet
- DC-DC Converter Fault (Important Paper)Document16 pagesDC-DC Converter Fault (Important Paper)shan.rahmanNo ratings yet
- High-Conversion-Ratio Isolated Bidirectional DCDC Converter For Distributed Energy Storage SystemsDocument22 pagesHigh-Conversion-Ratio Isolated Bidirectional DCDC Converter For Distributed Energy Storage SystemsHsekum Ramuk100% (1)
- Novel Zero-Current-Switching Current-Fed Half-Bridge Isolated DC DC Converter For Fuel-Cell-Based ApplicationsDocument11 pagesNovel Zero-Current-Switching Current-Fed Half-Bridge Isolated DC DC Converter For Fuel-Cell-Based ApplicationsHsekum RamukNo ratings yet
- Novel High-Conversion-Ratio High-Efficiency Isolated Bidirectional DCDC ConverterDocument12 pagesNovel High-Conversion-Ratio High-Efficiency Isolated Bidirectional DCDC ConverterHsekum RamukNo ratings yet
- Novel ForwardFlyback Hybrid Bidirectional DCDC ConverterDocument7 pagesNovel ForwardFlyback Hybrid Bidirectional DCDC ConverterHsekum RamukNo ratings yet
- Bidirectional BuckBoost Current-Fed Isolated DCDC Converter and Its ModulationDocument11 pagesBidirectional BuckBoost Current-Fed Isolated DCDC Converter and Its ModulationHsekum RamukNo ratings yet
- Design of High-Efficiency Isolated Bidirectional DC DC Converter With Single-Input Multiple-OutputsDocument18 pagesDesign of High-Efficiency Isolated Bidirectional DC DC Converter With Single-Input Multiple-OutputsHsekum RamukNo ratings yet
- JCA Python - Middle v. 2021 Lesson 01 FoxitDocument18 pagesJCA Python - Middle v. 2021 Lesson 01 FoxitMaksNo ratings yet
- Ax3000 Wifi 6 Gpon Voip Gateway Ont With 1-Port Usb: BenefitsDocument4 pagesAx3000 Wifi 6 Gpon Voip Gateway Ont With 1-Port Usb: Benefitsalexandre.estoquekayrosNo ratings yet
- EDITED Introduction To Human Computer InteractionDocument127 pagesEDITED Introduction To Human Computer Interactioncharl calderonNo ratings yet
- MSC (Cyber Security) Program Structure & SyllabusDocument126 pagesMSC (Cyber Security) Program Structure & SyllabusJokeR GamingNo ratings yet
- Building A Security Operations Center SODocument41 pagesBuilding A Security Operations Center SOaimen ighNo ratings yet
- ITN instructorPPT Chapter4Document66 pagesITN instructorPPT Chapter4MuhammedYeshawNo ratings yet
- GEH Statistic ENGDocument2 pagesGEH Statistic ENGSyahla RTRNo ratings yet
- Cyber ForensicsDocument496 pagesCyber ForensicsMaki MajomNo ratings yet
- CompTIA Security+ SY0-701 Last Minute CramDocument84 pagesCompTIA Security+ SY0-701 Last Minute CramAsdren MalokuNo ratings yet
- Assignment WiresharkDocument4 pagesAssignment Wiresharkmuhammad ariff baharudinNo ratings yet
- 17 Software Testing Life Cycle (STLC) - 01Document60 pages17 Software Testing Life Cycle (STLC) - 01Assan ShaikNo ratings yet
- Compact Arinc 429 Reader / Transmitter P/N: 21630SI1: ProductsDocument2 pagesCompact Arinc 429 Reader / Transmitter P/N: 21630SI1: ProductsBorgesNo ratings yet
- Processor DP ControlDocument44 pagesProcessor DP ControlNonex IstantNo ratings yet
- Cloud-376-RFP KAMAL SIDHUDocument62 pagesCloud-376-RFP KAMAL SIDHUprabhjot7001singhNo ratings yet
- Cite1004 Activity 1 MidtermDocument3 pagesCite1004 Activity 1 MidtermJoshua LimbagaNo ratings yet
- Priyanka ResumeDocument6 pagesPriyanka ResumeangelNo ratings yet
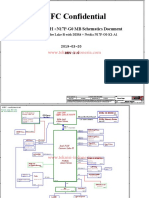
- Lenovo Ideapad l340 15irh NM c361 n17p g0 2Document69 pagesLenovo Ideapad l340 15irh NM c361 n17p g0 2Jonathan ChaNo ratings yet
- Nursing Tics 1st AssignmentDocument4 pagesNursing Tics 1st AssignmentMargie GuevarraNo ratings yet
- E07 Usermanual EN v1.00Document10 pagesE07 Usermanual EN v1.00Holman B.No ratings yet
- Sample FSDDocument130 pagesSample FSDShahab JumanNo ratings yet
- Cms-Rip-Linearization and ProfilingDocument8 pagesCms-Rip-Linearization and Profilingvictor DerrihuNo ratings yet
- Fraunf Can-Ctrl-Usg 2015Document61 pagesFraunf Can-Ctrl-Usg 2015陳AnitaNo ratings yet
- Security 4CSDocument6 pagesSecurity 4CSEsraa Sayed Abdelhamed SayedNo ratings yet
- (SSIS) Expressions (PDFDrive)Document166 pages(SSIS) Expressions (PDFDrive)SsNo ratings yet
- 1 Digital Design GeneralDocument35 pages1 Digital Design GeneralTâm PhanNo ratings yet
- IRM 3 UnixLinuxIntrusionDetectionDocument2 pagesIRM 3 UnixLinuxIntrusionDetectiontaekNo ratings yet
- Imdaad Case Study - Samsung Knox - a9PIDocument4 pagesImdaad Case Study - Samsung Knox - a9PIMijin VladimirNo ratings yet
- Cisco Live Multisite Evpn Vxlan BRKDCN-2035Document124 pagesCisco Live Multisite Evpn Vxlan BRKDCN-2035Harpreet Singh BatraNo ratings yet
- AC-JTAG: Empowering JTAG Beyond Testing DC Nets: IEEE International Test Conference (TC) February 2001Document9 pagesAC-JTAG: Empowering JTAG Beyond Testing DC Nets: IEEE International Test Conference (TC) February 2001thao nguyen leNo ratings yet
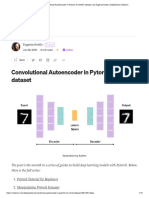
- Convolutional Autoencoder in Pytorch On MNIST Dataset - by Eugenia Anello - DataSeries - MediumDocument18 pagesConvolutional Autoencoder in Pytorch On MNIST Dataset - by Eugenia Anello - DataSeries - Mediumcloud4nrjNo ratings yet