Download as pdf or txt
You might also like
- Foundations of Complex Analysis: S. PonnusamyDocument3 pagesFoundations of Complex Analysis: S. PonnusamyVelan Velan100% (1)
- Engineering Surveying: Theory and Examination Problems for StudentsFrom EverandEngineering Surveying: Theory and Examination Problems for StudentsRating: 4.5 out of 5 stars4.5/5 (24)
- Tacheometry ReportDocument7 pagesTacheometry ReportMohd Zamzuri100% (1)
- Traverse ReportDocument8 pagesTraverse Reporthibby_tomey100% (1)
- Diagnostic Test in Science Grade 8 Sy20 21Document3 pagesDiagnostic Test in Science Grade 8 Sy20 21Gerald PardalesNo ratings yet
- Surveying Lab ReportDocument12 pagesSurveying Lab ReportAmmar MddeniNo ratings yet
- Advanced Surveying Lab PDFDocument88 pagesAdvanced Surveying Lab PDFAparna SharmaNo ratings yet
- Theodolite Traverse SurveyDocument6 pagesTheodolite Traverse SurveySiti Aishah Sahul Hamid57% (7)
- Surveying Assignment For BCASDocument13 pagesSurveying Assignment For BCASKrishna Eela0% (1)
- Certificate of Calibration: Name G.C. Thompson SignatureDocument3 pagesCertificate of Calibration: Name G.C. Thompson SignatureebbasinghNo ratings yet
- 86 15Document2 pages86 15luluNo ratings yet
- Chapter I A Field Report On TriangulatioDocument13 pagesChapter I A Field Report On TriangulatioemmanuelNo ratings yet
- Chapter Ii A Field Report On TraversingDocument18 pagesChapter Ii A Field Report On TraversingMandisa ZibulaNo ratings yet
- 201 Questions AnswersDocument21 pages201 Questions Answersrohith51No ratings yet
- Level 0 or Known As A Traditional Method of Conducting Laboratory ActivitiesDocument9 pagesLevel 0 or Known As A Traditional Method of Conducting Laboratory ActivitiesMohamad HaziqNo ratings yet
- Type The Document Title: Topic: Traverse SurveyDocument8 pagesType The Document Title: Topic: Traverse SurveyMuhammadZAmjadNo ratings yet
- Chapter I A Field Report On TriangulatioDocument14 pagesChapter I A Field Report On TriangulatioTamene ZelekeNo ratings yet
- Survey Ii Year (Ra13) KeyDocument20 pagesSurvey Ii Year (Ra13) KeyTejendra KumarNo ratings yet
- 3rd Sem Lab ManualDocument91 pages3rd Sem Lab ManualAyushNo ratings yet
- Surveying Important TopicsDocument42 pagesSurveying Important TopicsHemam PrasantaNo ratings yet
- TrabasDocument6 pagesTrabasFatin HazwaniNo ratings yet
- Geoinformatics LabDocument12 pagesGeoinformatics Labhamidreza shafieeNo ratings yet
- Fieldwork No. 6a (Interior Angle Traverse)Document7 pagesFieldwork No. 6a (Interior Angle Traverse)20101789No ratings yet
- Total StationDocument12 pagesTotal StationLic Torres JimenezNo ratings yet
- Traverse SurveyDocument9 pagesTraverse SurveyIkhwan JoniNo ratings yet
- Surveying LabDocument15 pagesSurveying Labzarakkhan masoodNo ratings yet
- Fieldwork No. 6a (Interior Angle Traverse)Document7 pagesFieldwork No. 6a (Interior Angle Traverse)20101789No ratings yet
- Engineering Journal To Experimental Study For Comparison Theodolite and Total StationDocument8 pagesEngineering Journal To Experimental Study For Comparison Theodolite and Total StationEngineering JournalNo ratings yet
- Survey-I Lab MannualDocument25 pagesSurvey-I Lab MannualVivek Thakur SujanianNo ratings yet
- CE2254 SQDocument99 pagesCE2254 SQMigaeaNo ratings yet
- FW 6A Interior Angle TraverseDocument4 pagesFW 6A Interior Angle TraverseMaria TheresaNo ratings yet
- Experiment No. 3: Angle Measurement Metrology & Instrumentation (3341905)Document7 pagesExperiment No. 3: Angle Measurement Metrology & Instrumentation (3341905)T.MNo ratings yet
- A Brief Introduction To The Measurement of Roundness and Spindle Error SeparationDocument12 pagesA Brief Introduction To The Measurement of Roundness and Spindle Error SeparationaralvoiNo ratings yet
- Lab 2 Determination of Angle, Distance and Bearing Group 4 Ecg422 1a2aDocument18 pagesLab 2 Determination of Angle, Distance and Bearing Group 4 Ecg422 1a2aNoradila RoslanNo ratings yet
- Ce3512 Survey Camp-1Document15 pagesCe3512 Survey Camp-1C.V. SHARMAHNo ratings yet
- Geomatic Engineering: Lab ReportDocument8 pagesGeomatic Engineering: Lab ReportHati Saya50% (2)
- Surveying Tools and Equipments1Document39 pagesSurveying Tools and Equipments1JEAN DE DIEU MUVARANo ratings yet
- Report Traverse Group 22Document12 pagesReport Traverse Group 22ewanz89100% (1)
- Fieldwork No. 6b (Deflection Angle Traverse)Document5 pagesFieldwork No. 6b (Deflection Angle Traverse)20101789No ratings yet
- Civil Ii Year 2017-2018Document102 pagesCivil Ii Year 2017-2018Frank JohnNo ratings yet
- Field Work 1: TachimetryDocument13 pagesField Work 1: TachimetryeyuyazmiNo ratings yet
- Dronacharya Group of Institutions, Greater Noida Department of CIVIL Engineering Semester: III Branch: CIVIL Session: 2015-16 Subject: Surveying LabDocument13 pagesDronacharya Group of Institutions, Greater Noida Department of CIVIL Engineering Semester: III Branch: CIVIL Session: 2015-16 Subject: Surveying LabVinay YadavNo ratings yet
- Survey Notes 2Document71 pagesSurvey Notes 2uppanapallichandu0No ratings yet
- Triangulation - Engineering SurveyingDocument30 pagesTriangulation - Engineering SurveyingWkNo ratings yet
- 3 Surveying - 1 NotesDocument28 pages3 Surveying - 1 NotesAshish SharmaNo ratings yet
- Advanced Surveying Lab-1Document56 pagesAdvanced Surveying Lab-1randhirNo ratings yet
- Traverse LabDocument23 pagesTraverse LabBesufkad YirguNo ratings yet
- Roundness and CircularityDocument16 pagesRoundness and CircularityKiran MadhavanNo ratings yet
- CE6304 Surveying-I 2015 07 16 10 57 06 997 PDFDocument19 pagesCE6304 Surveying-I 2015 07 16 10 57 06 997 PDFchagua zomboko100% (1)
- 319 - CE8351 Surveying - NotesDocument167 pages319 - CE8351 Surveying - NotesMichael LeroNo ratings yet
- Measurement Lab.: University of Jordan Faculty of Engineering and TechnologyDocument6 pagesMeasurement Lab.: University of Jordan Faculty of Engineering and TechnologyKarikalan Loganathan100% (1)
- 5.EMM Lab ManualDocument38 pages5.EMM Lab ManualRakeshkumarcegNo ratings yet
- Final Field ProjectDocument7 pagesFinal Field ProjectKarl KaiNo ratings yet
- Important Points in SurveyingDocument4 pagesImportant Points in SurveyingAnand BossNo ratings yet
- Surveying Practical Lab 3Document11 pagesSurveying Practical Lab 3FikrilAzimAbdulSani67% (3)
- Sug 208 Practical ManualDocument23 pagesSug 208 Practical ManualMuniru QudusNo ratings yet
- Total StationDocument15 pagesTotal StationDream zone EngineeringNo ratings yet
- Surveying - 1 - Ebook & NotesDocument72 pagesSurveying - 1 - Ebook & Notesmukund hansoraNo ratings yet
- Pinhole Camera Model: Understanding Perspective through Computational OpticsFrom EverandPinhole Camera Model: Understanding Perspective through Computational OpticsNo ratings yet
- Sun and Earth Modern User Reference Guide: Determining earth’s true surface shape as flat using the sunFrom EverandSun and Earth Modern User Reference Guide: Determining earth’s true surface shape as flat using the sunNo ratings yet
- Topics On Optical and Digital Image Processing Using Holography and Speckle TechniquesFrom EverandTopics On Optical and Digital Image Processing Using Holography and Speckle TechniquesNo ratings yet
- المحاضرة السابعة-مسح تصويريDocument18 pagesالمحاضرة السابعة-مسح تصويريهیوا حسینNo ratings yet
- المحاضرة الثامنة - Flight PlanningDocument14 pagesالمحاضرة الثامنة - Flight Planningهیوا حسینNo ratings yet
- مثال مخطط الطيرانDocument3 pagesمثال مخطط الطيرانهیوا حسینNo ratings yet
- 2 - Map Scale PDFDocument20 pages2 - Map Scale PDFهیوا حسینNo ratings yet
- 3 - Basic Geodesy, GCSystemDocument17 pages3 - Basic Geodesy, GCSystemهیوا حسینNo ratings yet
- Teaching 578 41031 1684353411 5Document8 pagesTeaching 578 41031 1684353411 5هیوا حسینNo ratings yet
- ch04 PDFDocument28 pagesch04 PDFFauzi KesumaNo ratings yet
- AV179348Document1 pageAV179348khanh123ctmNo ratings yet
- Littelfuse Thyristor Sxx20x Sxx25x Datasheet PDFDocument9 pagesLittelfuse Thyristor Sxx20x Sxx25x Datasheet PDFArraunaq fikriNo ratings yet
- Trusses - Method of SectionsDocument9 pagesTrusses - Method of SectionsKarisse SegaraNo ratings yet
- Journal of Colloid and Interface ScienceDocument7 pagesJournal of Colloid and Interface ScienceArif HidayatNo ratings yet
- X V LWH V 256 Surface Area 2lw+2lh+2hwDocument7 pagesX V LWH V 256 Surface Area 2lw+2lh+2hwEDWINNo ratings yet
- Power Supply Selection Guide: VOL.10 NO.1Document162 pagesPower Supply Selection Guide: VOL.10 NO.1richartinNo ratings yet
- PH3256 Physics for Information Science 1Document7 pagesPH3256 Physics for Information Science 1mohd.shakil5682No ratings yet
- 3) Diffraction - Final 23 Sep 2021Document38 pages3) Diffraction - Final 23 Sep 2021Game 1No ratings yet
- 2018 Book IntroductionToParticleAndAstro PDFDocument755 pages2018 Book IntroductionToParticleAndAstro PDFMuhammad ShakirNo ratings yet
- Mono58 7Document119 pagesMono58 7Marcus BragaNo ratings yet
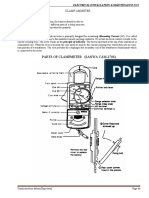
- Parts of Clampmeter (Sanwa Cam-270S) : Clamp AmmeterDocument4 pagesParts of Clampmeter (Sanwa Cam-270S) : Clamp AmmeterFERDINAND BANAGANo ratings yet
- EGPM-10-DAS-MOV-01 - Datasheet For MOV ActuatorDocument7 pagesEGPM-10-DAS-MOV-01 - Datasheet For MOV Actuatordrkongala100% (1)
- Chemistry - Xii 2020-21 - Revised & Reduced Syllabus - Sulekha PDFDocument7 pagesChemistry - Xii 2020-21 - Revised & Reduced Syllabus - Sulekha PDFanshuman roy0% (1)
- Prepare Report On Gear and Its TerminologyDocument12 pagesPrepare Report On Gear and Its TerminologyMadhuri TelangeNo ratings yet
- Civil Engineering Reference BookDocument463 pagesCivil Engineering Reference Bookenggakter58% (12)
- Whispers of The Quantum Garden Unveiling The Mysteries of RealityDocument3 pagesWhispers of The Quantum Garden Unveiling The Mysteries of Realityidreessial431No ratings yet
- A Novel Method To Eliminate The Symmetry Dependence of Fiber Coils For Shupe MitigationDocument8 pagesA Novel Method To Eliminate The Symmetry Dependence of Fiber Coils For Shupe MitigationNormanNo ratings yet
- Peelable Seal Films With Enhanced Moisture Barrier PropertiesDocument36 pagesPeelable Seal Films With Enhanced Moisture Barrier PropertiesjulioNo ratings yet
- Research Paper On Manufacturing ProcessDocument8 pagesResearch Paper On Manufacturing Processgw21tcyd100% (1)
- Corbel For Bottom Slab of Water Tank Design of Corbel at El+18.266Document2 pagesCorbel For Bottom Slab of Water Tank Design of Corbel at El+18.266mathuNo ratings yet
- Chemexam2222 Made by Sherra 2Document34 pagesChemexam2222 Made by Sherra 2tantiadohannahmarielleNo ratings yet
- 1.relativity 1 2 Spring 22-23Document31 pages1.relativity 1 2 Spring 22-23arthey FriendNo ratings yet
- EDC Key FinalDocument17 pagesEDC Key FinalVignesh GNo ratings yet
- VECTORS AND SCALARSgggggggggggggDocument5 pagesVECTORS AND SCALARSgggggggggggggVIDISHANo ratings yet
- Std. X Chemistry PAPER IV ExtendedDocument8 pagesStd. X Chemistry PAPER IV ExtendedYashodhaNo ratings yet