Download as pdf or txt
You might also like
- Fluid Mechanics Lab-I (Report)Document18 pagesFluid Mechanics Lab-I (Report)Mohammad Usman HabibNo ratings yet
- Water Hammer Caused by Closure of Turbine Safety Spherical ValvesDocument9 pagesWater Hammer Caused by Closure of Turbine Safety Spherical Valvesdavid_odNo ratings yet
- Measurement of The Fluid Flow Load On A Globe Valve Stem Under Various Cavitation ConditionsDocument16 pagesMeasurement of The Fluid Flow Load On A Globe Valve Stem Under Various Cavitation ConditionsbayuNo ratings yet
- Exp 7, Study of Forced Vortex Without Discharge OrificeDocument6 pagesExp 7, Study of Forced Vortex Without Discharge OrificeWasi Uddin MahmudNo ratings yet
- Minor Losses Lab ReportDocument11 pagesMinor Losses Lab ReportAbenezer TasewNo ratings yet
- Experiment No 5Document6 pagesExperiment No 52022me112No ratings yet
- Experiment 2 (1) Loses in ValveDocument5 pagesExperiment 2 (1) Loses in ValveAfzaFarzanaAhmadNo ratings yet
- Guidelines For Hydraulic Design of SHP - Chap6Document19 pagesGuidelines For Hydraulic Design of SHP - Chap6FlavioNo ratings yet
- Water Hammer 1Document11 pagesWater Hammer 1shaffetiNo ratings yet
- VII.4 Test Method of Trap Performance For Induced SiphonageDocument13 pagesVII.4 Test Method of Trap Performance For Induced SiphonageAl FauzanNo ratings yet
- Ring ValveDocument7 pagesRing Valvesayansaesue2514No ratings yet
- Air Flow Velocity Measurement Using Pitot-Static Tube (Fluid Exp 4)Document10 pagesAir Flow Velocity Measurement Using Pitot-Static Tube (Fluid Exp 4)hayder alaliNo ratings yet
- Energy Losses in BendsDocument10 pagesEnergy Losses in BendsAngelica Joyce BenitoNo ratings yet
- MIT-EL-80-017-09574615 Steam Bubble Collapse Water Hammer and Piping Network Response Volume 1 PDFDocument51 pagesMIT-EL-80-017-09574615 Steam Bubble Collapse Water Hammer and Piping Network Response Volume 1 PDFhamadaniNo ratings yet
- Fluid Mechanics Sessional CE 262Document28 pagesFluid Mechanics Sessional CE 262মোঃমেহেদী হাসান শরীফNo ratings yet
- E3 BernoulliDocument16 pagesE3 BernoullikishoreNo ratings yet
- AgriDocument22 pagesAgripuneet bhatiaNo ratings yet
- Ece135p Exp. 4 Pressure Flow and Level Process ControlDocument8 pagesEce135p Exp. 4 Pressure Flow and Level Process ControlPao CastillonNo ratings yet
- CSHS 2003 GajicDocument16 pagesCSHS 2003 GajicMircea BolovedeaNo ratings yet
- Dublin2015Traudtfinal PDFDocument12 pagesDublin2015Traudtfinal PDFuroskNo ratings yet
- Fracture Problem of The Valve of Piston Engine (2016)Document9 pagesFracture Problem of The Valve of Piston Engine (2016)TuanNo ratings yet
- Experiment 8: Minor LossesDocument8 pagesExperiment 8: Minor LossesTalha TirmiziNo ratings yet
- Characteristics of Control ValveDocument9 pagesCharacteristics of Control ValvecomodusNo ratings yet
- FM42 - ManualDocument11 pagesFM42 - ManualAmy FarhanaNo ratings yet
- Lab 5Document12 pagesLab 5Madhumita KumarNo ratings yet
- 2016 - Multiphase (Jato Cavitante-2016-33Cit)Document15 pages2016 - Multiphase (Jato Cavitante-2016-33Cit)Paulinho JuniorNo ratings yet
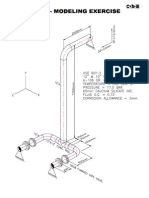
- Caesar II Modeling ExcisersDocument40 pagesCaesar II Modeling ExcisersBùi Văn Hợp100% (2)
- VIV Prediction of A Truss Spar Pull-Tube Array Using CFD: A Platform For InnovationDocument13 pagesVIV Prediction of A Truss Spar Pull-Tube Array Using CFD: A Platform For InnovationAmanda MartinezNo ratings yet
- REPORTpp 1Document16 pagesREPORTpp 1gajulavamshikrishna02No ratings yet
- Experiment 7 - Performance Characteristics of Centrifugal PumpDocument7 pagesExperiment 7 - Performance Characteristics of Centrifugal PumpCassandra JienahNo ratings yet
- Well Testing and Evaluation: Well Flow (Production) Test - Physical CharacteristicsDocument12 pagesWell Testing and Evaluation: Well Flow (Production) Test - Physical Characteristicsyadi_supriyadiNo ratings yet
- Losses in Bends FittingsDocument26 pagesLosses in Bends FittingsKunalNo ratings yet
- Practice Work 3: Orifice Flow ExperimentDocument8 pagesPractice Work 3: Orifice Flow ExperimentPhaNith EmNo ratings yet
- Analitcka Studija Dinamike I Stabinosti Sigurnosnog VentilaDocument8 pagesAnalitcka Studija Dinamike I Stabinosti Sigurnosnog VentilaMarko RisticNo ratings yet
- Conservation of Energy: The Bernoulli Equation: Figure 1. A Very Large Venturi MeterDocument8 pagesConservation of Energy: The Bernoulli Equation: Figure 1. A Very Large Venturi Meterdist2235No ratings yet
- Design of The HVA Water TunnelDocument10 pagesDesign of The HVA Water TunnelSjoerd_BNo ratings yet
- Lab 2 ReportDocument16 pagesLab 2 ReportLiyanna Blanda100% (2)
- Demonstration of Bernoulli's TheoremDocument22 pagesDemonstration of Bernoulli's TheoremEason OngNo ratings yet
- Fluid Mechanics-II New WorkbookDocument50 pagesFluid Mechanics-II New WorkbookMr. Muhammad Hassam SiddiquiNo ratings yet
- Experiment 5 - Group 2Document16 pagesExperiment 5 - Group 2Arrianna PeterNo ratings yet
- Simulation of Accumulator Influence On Hydraulic Shock in Long PipeDocument4 pagesSimulation of Accumulator Influence On Hydraulic Shock in Long PipeGkkNo ratings yet
- Chern 2007Document8 pagesChern 2007Albab HossainNo ratings yet
- A Study of Pressure Safety Valve Response Times Under Transient OverpressuresDocument9 pagesA Study of Pressure Safety Valve Response Times Under Transient OverpressuresLeo MilojevićNo ratings yet
- Fluid Mechanics Sessional CE 262Document28 pagesFluid Mechanics Sessional CE 262মোঃমেহেদী হাসান শরীফNo ratings yet
- Losses in Bends FittingsDocument26 pagesLosses in Bends Fittingsdainer08No ratings yet
- MTD-99 100Document33 pagesMTD-99 100quoctrangbk02No ratings yet
- Calculating Reliability Impact VelocityDocument8 pagesCalculating Reliability Impact VelocitydrdreghNo ratings yet
- Bernoulli Theorem FM24 Complete Manual PDFDocument36 pagesBernoulli Theorem FM24 Complete Manual PDFKicauan KataNo ratings yet
- Tutorial: Valve Closure and Transient Pressure Wave (Part 1)Document12 pagesTutorial: Valve Closure and Transient Pressure Wave (Part 1)Anonymous I4CTAwUNo ratings yet
- FM 24 Manual - Bernoullis TheoremDocument30 pagesFM 24 Manual - Bernoullis TheoremNORHAFINI HAMBALINo ratings yet
- FM 24 ManualDocument18 pagesFM 24 ManualMohd Nor SollehanNo ratings yet
- Supercavitating Propellers PDFDocument41 pagesSupercavitating Propellers PDFAlex FatecNo ratings yet
- Defense Technical Information Center Compilation Part NoticeDocument41 pagesDefense Technical Information Center Compilation Part NoticeIgnacio TabuadaNo ratings yet
- Tutorial: Valve Closure and Transient Pressure Wave (Part 2)Document8 pagesTutorial: Valve Closure and Transient Pressure Wave (Part 2)Anonymous I4CTAwUNo ratings yet
- Enhanced Oil Recovery: Resonance Macro- and Micro-Mechanics of Petroleum ReservoirsFrom EverandEnhanced Oil Recovery: Resonance Macro- and Micro-Mechanics of Petroleum ReservoirsRating: 5 out of 5 stars5/5 (1)
- Modern Borehole Analytics: Annular Flow, Hole Cleaning, and Pressure ControlFrom EverandModern Borehole Analytics: Annular Flow, Hole Cleaning, and Pressure ControlNo ratings yet
- GCO - 1 - 1991 Review of Earthquake Data For The Hong Kong Region (1991), 115 p1Document110 pagesGCO - 1 - 1991 Review of Earthquake Data For The Hong Kong Region (1991), 115 p1jd hanNo ratings yet
- FILE 20220107 222239 Solutions - IGO-2021Document36 pagesFILE 20220107 222239 Solutions - IGO-2021Nhân DuyNo ratings yet
- Passing Ability of Self-Consolidating Concrete by J-Ring: Standard Test Method ForDocument5 pagesPassing Ability of Self-Consolidating Concrete by J-Ring: Standard Test Method ForbilalNo ratings yet
- Guide On MEPS For Washing MachineDocument10 pagesGuide On MEPS For Washing MachineffitriNo ratings yet
- Selenium - Setup in NutshellDocument6 pagesSelenium - Setup in Nutshellpayel palNo ratings yet
- Problem Solutions: September 28, 2005 DraftDocument34 pagesProblem Solutions: September 28, 2005 DraftMạnh QuangNo ratings yet
- Module 11: Ipv4 Addressing: Introduction To Networks V7.0 (Itn)Document58 pagesModule 11: Ipv4 Addressing: Introduction To Networks V7.0 (Itn)Diana YacchiremaNo ratings yet
- Lab Report A763319Document7 pagesLab Report A763319David EvansNo ratings yet
- Bone Mineral DensityDocument5 pagesBone Mineral DensityMd Ahsanuzzaman PinkuNo ratings yet
- OOPS ConceptsDocument9 pagesOOPS ConceptsVijay ChikkalaNo ratings yet
- Parker SSD Drives 650 Series Quick Start GuideDocument2 pagesParker SSD Drives 650 Series Quick Start Guideeng_karamazabNo ratings yet
- Woods 1980 Geomorphology, Deformation, and Chronology of Marine Terraces Along The Pacific Coast of Central Baja California, MexicoDocument19 pagesWoods 1980 Geomorphology, Deformation, and Chronology of Marine Terraces Along The Pacific Coast of Central Baja California, MexicoLoraine Faye SarmientoNo ratings yet
- Assignment Programs: Program CodeDocument18 pagesAssignment Programs: Program CoderaziaNo ratings yet
- 46R 111 PDFDocument22 pages46R 111 PDFkhaeruzzamanNo ratings yet
- Communications Systems - Ple 1mexx0 XX Plena Mixer AmplifierDocument4 pagesCommunications Systems - Ple 1mexx0 XX Plena Mixer AmplifierYOGESH SONINo ratings yet
- Three-Dimensional Anthropometry of The Lips in Young Japanese AdultsDocument6 pagesThree-Dimensional Anthropometry of The Lips in Young Japanese AdultsDrDejanDrakulNo ratings yet
- Urdu Bible Old Testament Geo Version IstisnaDocument51 pagesUrdu Bible Old Testament Geo Version IstisnaAsia Bibles100% (1)
- Spec Sheet SD200Document8 pagesSpec Sheet SD200Yohanes ArgamNo ratings yet
- ATi Radeon R300 SeriesDocument5 pagesATi Radeon R300 SeriesHeikkiNo ratings yet
- Written Report ProbabilityDocument8 pagesWritten Report ProbabilitySherl Escandor100% (1)
- 2021 Grade 12 Science Paper 1 End of Term 1 TestDocument5 pages2021 Grade 12 Science Paper 1 End of Term 1 TestDavies MasumbaNo ratings yet
- International Standard: Series 1 Freight Containers - Corner and Intermediate Fittings - SpecificationsDocument11 pagesInternational Standard: Series 1 Freight Containers - Corner and Intermediate Fittings - Specificationssandeep@homeNo ratings yet
- The Simple Answer To Torque Steer: "Revo" Suspension: Ford Forschungszentrum AachenDocument18 pagesThe Simple Answer To Torque Steer: "Revo" Suspension: Ford Forschungszentrum AachennmigferNo ratings yet
- Al55 66 Technical Manual v11 EngDocument60 pagesAl55 66 Technical Manual v11 EngProblem VelikiNo ratings yet
- Floating Breakwater DesignDocument15 pagesFloating Breakwater DesignLazaros NtoanidisNo ratings yet
- Cable Instrumentación Apantallado 8x2x16AWG 300V 90°C Libre de Halógeno, UL, X MDocument1 pageCable Instrumentación Apantallado 8x2x16AWG 300V 90°C Libre de Halógeno, UL, X MDiana SalasNo ratings yet
- Thermal Treatment of Kaolin Clay To Obtain Metakaolin: Institute For Testing of Materials, Belgrade, SerbiaDocument6 pagesThermal Treatment of Kaolin Clay To Obtain Metakaolin: Institute For Testing of Materials, Belgrade, SerbiaBekraoui KeltoumNo ratings yet
- III Shear Force & Bending Moment Simple Stress Stain: Unit TestDocument3 pagesIII Shear Force & Bending Moment Simple Stress Stain: Unit TesthasanNo ratings yet
- Microencapsulationgss 160227005508 PDFDocument70 pagesMicroencapsulationgss 160227005508 PDFSelva RathinamNo ratings yet
- bc337 PDFDocument4 pagesbc337 PDFgerluccioniNo ratings yet