Download as pdf or txt
You might also like
- Solution Manual For An Introduction To Management Science 15th Edition by Anderson Complete Downloadable File atDocument6 pagesSolution Manual For An Introduction To Management Science 15th Edition by Anderson Complete Downloadable File at时家欣0% (1)
- Related Rates ProjectDocument3 pagesRelated Rates Projectapi-317867476No ratings yet
- Image Restoration 2Document25 pagesImage Restoration 2A JNo ratings yet
- Image Restoration: B14 Image Analysis Michaelmas 2014 A. Zisserman - Image DegradationsDocument48 pagesImage Restoration: B14 Image Analysis Michaelmas 2014 A. Zisserman - Image DegradationsybNo ratings yet
- Image Restoration II & Morphological Processing: Comp344 Tutorial Kai ZhangDocument20 pagesImage Restoration II & Morphological Processing: Comp344 Tutorial Kai Zhangtigoldo2008No ratings yet
- Lecture Notes EE528Document6 pagesLecture Notes EE528DrRandomNo ratings yet
- LESSON MarkedDocument8 pagesLESSON MarkedjoanporterolafargaNo ratings yet
- Fourier Transforms For DIPDocument40 pagesFourier Transforms For DIPAllanki Sanyasi RaoNo ratings yet
- Fourier Transform 2DDocument58 pagesFourier Transform 2DPhi Mac100% (2)
- Image Restoration: Noise Removal Using Frequency Domain FiltersDocument32 pagesImage Restoration: Noise Removal Using Frequency Domain FiltersDuaa HusseinNo ratings yet
- Fourier Transform: Naveen SihagDocument54 pagesFourier Transform: Naveen SihagDr. M. Karthigai Pandian Asso Prof ICENo ratings yet
- Wavelet J2KDocument56 pagesWavelet J2Kyt peekNo ratings yet
- 12 RRY025 07 Jan 2020material - II - 07 Jan 2020 - Probf08.solDocument6 pages12 RRY025 07 Jan 2020material - II - 07 Jan 2020 - Probf08.solSrirakesh TulabandulaNo ratings yet
- Lecture 5Document39 pagesLecture 5bedline.salesNo ratings yet
- Analog Optical Information Processing: Weimin Sun College of Science Harbin Engineering UniversityDocument40 pagesAnalog Optical Information Processing: Weimin Sun College of Science Harbin Engineering UniversityGuilherme MoreiraNo ratings yet
- The Fourier Transform: Jean Baptiste Joseph FourierDocument22 pagesThe Fourier Transform: Jean Baptiste Joseph FourierAbhinav_Batish_1810No ratings yet
- Aliasing PDFDocument11 pagesAliasing PDFGiannis GkouzionisNo ratings yet
- Fourier TransformDocument45 pagesFourier TransformMarzan Samin AshrafiNo ratings yet
- Chapter 5Document49 pagesChapter 5SunnyNo ratings yet
- Digital Image Processing (Chapter 4)Document62 pagesDigital Image Processing (Chapter 4)Md.Nazmul Abdal Shourov100% (1)
- Figures From Gonzalez and Woods, Digital Image Processing, Second Edition, 2002Document21 pagesFigures From Gonzalez and Woods, Digital Image Processing, Second Edition, 2002Priyanka ChauahnNo ratings yet
- 03 - Image TransformsDocument9 pages03 - Image TransformsrajendrasoloniNo ratings yet
- Aa Dip 1 3 (Frequency Domain)Document27 pagesAa Dip 1 3 (Frequency Domain)Satkirti SharmaNo ratings yet
- Filtering LNDocument43 pagesFiltering LNAgatha AstriseleNo ratings yet
- Lab7 20073 Fourier OpticsDocument5 pagesLab7 20073 Fourier OpticsBHAWANA PanchalNo ratings yet
- Filter 2Document18 pagesFilter 2gaurav_juneja_4No ratings yet
- Eng4Bf3 Medical Image Processing: Wavelet and Multiresolution ProcessingDocument49 pagesEng4Bf3 Medical Image Processing: Wavelet and Multiresolution ProcessingSelva KumarNo ratings yet
- Game Engine Programming 2 Week 7 Module 2Document11 pagesGame Engine Programming 2 Week 7 Module 2Dean LevyNo ratings yet
- Imagerestoration Degradation FunctionnewDocument21 pagesImagerestoration Degradation FunctionnewMudathir AyomideNo ratings yet
- Fourier Series and Sturm-Liouville Eigenvalue Problems: Y. K. GohDocument67 pagesFourier Series and Sturm-Liouville Eigenvalue Problems: Y. K. GohRaja RamNo ratings yet
- Lecture03 FT 2DDocument68 pagesLecture03 FT 2DMd Nur-A-Adam DonyNo ratings yet
- Digital Video: Progressive Scanning: One Full Frame Every 1/30th of A SecondDocument12 pagesDigital Video: Progressive Scanning: One Full Frame Every 1/30th of A Secondsandipprmar007No ratings yet
- Convolutions: Presented by From StoutDocument22 pagesConvolutions: Presented by From StoutDipen BarotNo ratings yet
- MODULE I Image Transforms 1Document69 pagesMODULE I Image Transforms 1jacksonb200743csNo ratings yet
- Image Restoration (Sections 5.1, 5.5, 5.7, 5.9) : CS474/674 - Prof. BebisDocument67 pagesImage Restoration (Sections 5.1, 5.5, 5.7, 5.9) : CS474/674 - Prof. Bebissrc010850% (2)
- Image Restoration Sample Exam ProblemsDocument3 pagesImage Restoration Sample Exam ProblemsshailendratiwariNo ratings yet
- Convex Optimization in Image Processing: Ernie EsserDocument9 pagesConvex Optimization in Image Processing: Ernie EsserM Rameez Ur RehmanNo ratings yet
- L-11 (Digital ImageProcessing-Image Enhancement in Frequency Domain)Document69 pagesL-11 (Digital ImageProcessing-Image Enhancement in Frequency Domain)career Point BastiNo ratings yet
- 1 EdgeDocument140 pages1 EdgejosnaNo ratings yet
- 2 Marks QA and Part B Answers - MIP - Unit 3Document53 pages2 Marks QA and Part B Answers - MIP - Unit 3suhagajaNo ratings yet
- Homomorphic Filtering 94015Document14 pagesHomomorphic Filtering 94015Murali Krishna DamaNo ratings yet
- Power Electronics Notes by ArunkumarDocument58 pagesPower Electronics Notes by ArunkumarVishwanath ShervegarNo ratings yet
- F &2ax Da .: and Other Phenomena Are DiscussedDocument7 pagesF &2ax Da .: and Other Phenomena Are DiscussedAmit Kurmar SharmaNo ratings yet
- Numerical Methods For Solving Ordinary Differential EquationsDocument45 pagesNumerical Methods For Solving Ordinary Differential EquationsSupratim BhattacharjeeNo ratings yet
- Image Filtering - 2Document59 pagesImage Filtering - 2Jani Saida ShaikNo ratings yet
- 05Document61 pages05Yogesh KatreNo ratings yet
- Lecture 02Document25 pagesLecture 02Nisa Cantika BaharNo ratings yet
- Lecture 2: Image Processing Review, Neighbors, Connected Components, and DistanceDocument7 pagesLecture 2: Image Processing Review, Neighbors, Connected Components, and DistanceWilliam MartinezNo ratings yet
- Lecture05 Enhancement FrequencyDocument57 pagesLecture05 Enhancement FrequencyQazi SulalNo ratings yet
- 1 Convolution and Linear Time-Invariant Sys-TemsDocument3 pages1 Convolution and Linear Time-Invariant Sys-Temshasan911No ratings yet
- Lecture 4Document36 pagesLecture 4nctgayarangaNo ratings yet
- Ordinary Diff EquationsDocument18 pagesOrdinary Diff EquationsTemitope BelloNo ratings yet
- ICT-U3-LP12Document47 pagesICT-U3-LP12VarozNo ratings yet
- Jump and Sharp Cusp Detection by WaveletsDocument14 pagesJump and Sharp Cusp Detection by WaveletsAyyubi AhmadNo ratings yet
- NM (Unit 4) NotesDocument16 pagesNM (Unit 4) NotesAxNo ratings yet
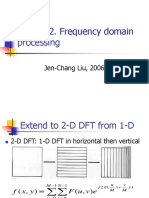
- Chap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Document51 pagesChap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Ashfiya ThahirNo ratings yet
- Image RestorationDocument21 pagesImage RestorationArun MahalingamNo ratings yet
- Image RestorationDocument70 pagesImage RestorationJoelNo ratings yet
- Image EnhancementDocument84 pagesImage Enhancementyogini choudharyNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Question and Answers MCQSDocument4 pagesQuestion and Answers MCQSbhandari0148100% (3)
- 09 Linear Forced Through Zero Calib PDFDocument13 pages09 Linear Forced Through Zero Calib PDFBryanMojalottMoroteNo ratings yet
- Branch & Bound Algorithms: Briana B. Morrison With Thanks To Dr. HungDocument32 pagesBranch & Bound Algorithms: Briana B. Morrison With Thanks To Dr. HungChandan MishraNo ratings yet
- CL7101-Control System DesignDocument8 pagesCL7101-Control System DesigndhineshpNo ratings yet
- Data Structures and AlgorithmsDocument70 pagesData Structures and AlgorithmsMike CalebNo ratings yet
- CryptographyDocument6 pagesCryptographyAguinaldo Cristiano0% (1)
- Estimation of Parameters 2Document37 pagesEstimation of Parameters 2Angela Grace CatralNo ratings yet
- Optimal ISA-PID-Based Drug Concentration Control in Cancer ChemotherapyDocument7 pagesOptimal ISA-PID-Based Drug Concentration Control in Cancer ChemotherapymaryamNo ratings yet
- Peng, Bo y Otros A Meta-Analysis of International Tourism Demand Forecasting andDocument13 pagesPeng, Bo y Otros A Meta-Analysis of International Tourism Demand Forecasting andEdith López CiucciNo ratings yet
- Introduction & Motivation: Bedir Halcı and Alper ŞişmanDocument1 pageIntroduction & Motivation: Bedir Halcı and Alper ŞişmanBedir HalcıNo ratings yet
- CEMC's Open Courseware - Answers - All ExercisesDocument25 pagesCEMC's Open Courseware - Answers - All ExercisesMr. Math & ScienceNo ratings yet
- Pinto 10Document15 pagesPinto 10jahanzebNo ratings yet
- 3130908Document3 pages3130908Darshit KotadiyaNo ratings yet
- FMCW Range Doppler MapDocument2 pagesFMCW Range Doppler MapReinaldoNo ratings yet
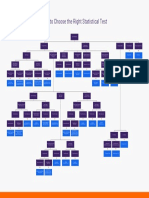
- Graphpad-Flowchart PDFDocument1 pageGraphpad-Flowchart PDFNerdy JoeNo ratings yet
- Ejemplo Prueba de Goldfeld-QuandtDocument2 pagesEjemplo Prueba de Goldfeld-QuandtAmelia Albina Cabrera CornejoNo ratings yet
- Lab Manual # 10 (LCS) (2018-CPE-07)Document5 pagesLab Manual # 10 (LCS) (2018-CPE-07)Momel FatimaNo ratings yet
- SASTRA - M.tech. ACS (Advanced Communication Systems) - SyllabusDocument37 pagesSASTRA - M.tech. ACS (Advanced Communication Systems) - SyllabusJOHN PETER100% (1)
- Arpita - Sarkar - Business - Report - 17th December, 2023Document23 pagesArpita - Sarkar - Business - Report - 17th December, 2023Prathamesh LavekarNo ratings yet
- A Hybrid Genetic Algorithm For Integrated Process Planning and Scheduling Problem With Precedence ConstraintsDocument15 pagesA Hybrid Genetic Algorithm For Integrated Process Planning and Scheduling Problem With Precedence ConstraintsJohn RichardsonNo ratings yet
- Choosing The Pressure-Velocity Coupling MethodDocument4 pagesChoosing The Pressure-Velocity Coupling MethodAtulNo ratings yet
- Journal of Computational Physics: Zichao Long, Yiping Lu, Bin DongDocument17 pagesJournal of Computational Physics: Zichao Long, Yiping Lu, Bin DongAman JalanNo ratings yet
- Worksheet of Linear Equation With One VariableDocument5 pagesWorksheet of Linear Equation With One VariablekristianasillyNo ratings yet
- Question Bank Eee51104: Neural Networks: Unit 1 1-MarksDocument3 pagesQuestion Bank Eee51104: Neural Networks: Unit 1 1-MarksBarunava SikdarNo ratings yet
- 2020 M1 Suggested Solution PDFDocument13 pages2020 M1 Suggested Solution PDF918goodyNo ratings yet
- Machine Learning and Structural Health Monitoring Overview With Emerging Technology and High-Dimensional Data Source HighlightsDocument50 pagesMachine Learning and Structural Health Monitoring Overview With Emerging Technology and High-Dimensional Data Source Highlightsbrettharvey555No ratings yet
- LPPDocument5 pagesLPPdheerajgulati_31100% (3)
- MQ Cap7 PDFDocument7 pagesMQ Cap7 PDFmekokiNo ratings yet