Download as pdf or txt
You might also like
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- A Design Manual For Water WheelsDocument82 pagesA Design Manual For Water WheelsNicolas InfanteNo ratings yet
- Q1 - BasicDocument1 pageQ1 - BasicMac KYNo ratings yet
- Concept For An Onboard Integrated PNT UnitDocument8 pagesConcept For An Onboard Integrated PNT Unithome taiNo ratings yet
- Mayjune16 WPDocument10 pagesMayjune16 WPdong wangNo ratings yet
- 293 FullDocument21 pages293 Fulltofa abiNo ratings yet
- Assessments of Ship PositionDocument16 pagesAssessments of Ship PositionЮра ОксамытныйNo ratings yet
- Jiddoo ReportDocument3 pagesJiddoo Reporttobi powpowNo ratings yet
- IALA Design of Fairways Doc - 307 - EngDocument42 pagesIALA Design of Fairways Doc - 307 - EngDeanna Barrett100% (2)
- 8 ChapterDocument41 pages8 ChapterІмран АлулуNo ratings yet
- (Sky-Tel) 2009.importance of N-RTK, Wireless For Location Services, and Radio Location Augmentation of GNSS - by Trimble CEODocument2 pages(Sky-Tel) 2009.importance of N-RTK, Wireless For Location Services, and Radio Location Augmentation of GNSS - by Trimble CEOSkybridge Spectrum FoundationNo ratings yet
- Schmidt, G. T. (2010) - INSGPS Technology TrendsDocument23 pagesSchmidt, G. T. (2010) - INSGPS Technology TrendsFísica La SalleNo ratings yet
- Sto en Set 197 01Document24 pagesSto en Set 197 01Vũ Huy MừngNo ratings yet
- Chris Rizos to Sky-Tel. Nationwide High Accuracy Positioning Infrastructure and Services, GNSS+Terrestrial, Including for Intelligent Transportation Systems: Background, Technology, Uses, Developments and ChallengesDocument24 pagesChris Rizos to Sky-Tel. Nationwide High Accuracy Positioning Infrastructure and Services, GNSS+Terrestrial, Including for Intelligent Transportation Systems: Background, Technology, Uses, Developments and ChallengesSkybridge Spectrum FoundationNo ratings yet
- Sop (Ris) IndiaDocument33 pagesSop (Ris) IndiapadangiringNo ratings yet
- NGS User Guidelines RTKDocument151 pagesNGS User Guidelines RTKgasteduNo ratings yet
- Global Positioning System (GPS) Time Dissemination For Real-Time ApplicationsDocument32 pagesGlobal Positioning System (GPS) Time Dissemination For Real-Time ApplicationsMarco NisiNo ratings yet
- Ais Readiolocation and Tracking PostprintDocument26 pagesAis Readiolocation and Tracking PostprintFrancisco PintoNo ratings yet
- GPS GuidelinesDocument151 pagesGPS GuidelinesPraveen KolluruNo ratings yet
- Evaluation of Precise Point Positioning and Post-ProcessingDocument17 pagesEvaluation of Precise Point Positioning and Post-ProcessingAntônio J S VerasNo ratings yet
- GPS ApplicationsDocument26 pagesGPS ApplicationskrrishNo ratings yet
- Scan Pattern For The Maritime NavigatorDocument9 pagesScan Pattern For The Maritime NavigatorTFattahNo ratings yet
- GPS Backup ReleasedDocument68 pagesGPS Backup Releaseddivya292No ratings yet
- Application of GNSS Methods For MonitoringDocument6 pagesApplication of GNSS Methods For Monitoringputra sahajaNo ratings yet
- THE GNSS MODERNIZATION Last TopicDocument3 pagesTHE GNSS MODERNIZATION Last TopicRea FloresNo ratings yet
- Nav AidDocument8 pagesNav Aidanmay kadamNo ratings yet
- Evolution of Maritime GNSS and RNSS Performance STDocument28 pagesEvolution of Maritime GNSS and RNSS Performance STAnaNo ratings yet
- Nautical Predictive Routing Protocol (NPRP) For The Dynamic Ad-Hoc Nautical Network (DANN)Document16 pagesNautical Predictive Routing Protocol (NPRP) For The Dynamic Ad-Hoc Nautical Network (DANN)Jean Louis KacouNo ratings yet
- IALA Maritime Radio Communications PlanDocument57 pagesIALA Maritime Radio Communications Plansanjin_valcicNo ratings yet
- RTKDocument18 pagesRTKSumit KumarNo ratings yet
- Radar SLAM Using Visual Features: Research Open AccessDocument11 pagesRadar SLAM Using Visual Features: Research Open AccessmcgagliardiNo ratings yet
- Performance of Low-Cost GNSS Receiver For Landslides Monitoring Test and ResultsDocument19 pagesPerformance of Low-Cost GNSS Receiver For Landslides Monitoring Test and Resultsעִמָּנוּאֵל פרחNo ratings yet
- Performance Analysis of Network-RTK Techniques ForDocument8 pagesPerformance Analysis of Network-RTK Techniques ForSergiy PogoryelovNo ratings yet
- A Benchmark of Dual Constellations GNSS Solutions For Vehicle Localization in Container TerminalsDocument7 pagesA Benchmark of Dual Constellations GNSS Solutions For Vehicle Localization in Container TerminalsjfrasconNo ratings yet
- Topographic Survey ReportDocument21 pagesTopographic Survey ReportASad100% (3)
- A Review On Unmanned Surface Vehicles DevelopmentDocument8 pagesA Review On Unmanned Surface Vehicles Developmentwwt1135172086No ratings yet
- Design and Application of An Automated Smart Buoy in Increasing Navigation Safety and Environmental Standards in PortsDocument9 pagesDesign and Application of An Automated Smart Buoy in Increasing Navigation Safety and Environmental Standards in PortssiscaayurNo ratings yet
- Global Navigation Satellite System (GNSS) Manual: Doc 9849 AN/457Document68 pagesGlobal Navigation Satellite System (GNSS) Manual: Doc 9849 AN/457Đoàn Hồng NgọcNo ratings yet
- GNSS PDFDocument39 pagesGNSS PDFEdi KazuoNo ratings yet
- Principle and Performance of Multi-Frequency and multi-GNSS PPP-RTKDocument11 pagesPrinciple and Performance of Multi-Frequency and multi-GNSS PPP-RTKveteg67000No ratings yet
- Gps Lecture NotesDocument101 pagesGps Lecture NotesRocking ChakravarthyNo ratings yet
- RTK PerformanceDocument8 pagesRTK PerformanceThanate JongrujinanNo ratings yet
- Satellite and Terrestrial Radionavigation Systems On European Inland Waterways PDFDocument6 pagesSatellite and Terrestrial Radionavigation Systems On European Inland Waterways PDFKiril MarinovNo ratings yet
- Satellite Systems: DP Operator Course DGPS/Glonass Training ManualDocument16 pagesSatellite Systems: DP Operator Course DGPS/Glonass Training ManualStefan AndrioaeNo ratings yet
- Articulo 2 PDFDocument16 pagesArticulo 2 PDFGonzalo ZavaletaNo ratings yet
- FPjohnson GregoryDocument7 pagesFPjohnson GregoryMuhammad fifanNo ratings yet
- Achieving High Navigation Accuracy Using Inertial Navigation Systems in Autonomous Underwater VehiclesDocument7 pagesAchieving High Navigation Accuracy Using Inertial Navigation Systems in Autonomous Underwater Vehicles侯博No ratings yet
- The use of spread spectrum in GPSDocument5 pagesThe use of spread spectrum in GPSAhmed ZrenaNo ratings yet
- CHAP 1: Vessel Traffic SystemDocument2 pagesCHAP 1: Vessel Traffic SystemAl Mobarack AbdillahiNo ratings yet
- Fishermen Rescue System With LoRa ModuleDocument5 pagesFishermen Rescue System With LoRa ModuleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Kalman and Butterworth Filtering For GNSS/INS DataDocument4 pagesKalman and Butterworth Filtering For GNSS/INS DataJesus LazaroNo ratings yet
- GNSS Position Integrity in Urban Environments A Review of LiteratureDocument17 pagesGNSS Position Integrity in Urban Environments A Review of LiteraturePedro PereiraNo ratings yet
- Testing Accuracy of Maritime DGPS System Based On Long-Term Measurements Campaigns Over The Years 2006-2014Document9 pagesTesting Accuracy of Maritime DGPS System Based On Long-Term Measurements Campaigns Over The Years 2006-2014Seamen 777No ratings yet
- RAIM Algorithm PredictionDocument4 pagesRAIM Algorithm PredictionFreewindRiderNo ratings yet
- Gps & Its ApplicationsDocument6 pagesGps & Its ApplicationsDivya VarshneyNo ratings yet
- CDAC Navigation Tool Kit For GNSS Satellites ReceiverDocument6 pagesCDAC Navigation Tool Kit For GNSS Satellites ReceiverInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Remote Sensing: Advancements and Applications in Computer Vision for Remote SensingFrom EverandRemote Sensing: Advancements and Applications in Computer Vision for Remote SensingNo ratings yet
- Global Positioning Systems, Inertial Navigation, and IntegrationFrom EverandGlobal Positioning Systems, Inertial Navigation, and IntegrationRating: 1 out of 5 stars1/5 (1)
- Global Positioning: Technologies and PerformanceFrom EverandGlobal Positioning: Technologies and PerformanceRating: 5 out of 5 stars5/5 (1)
- Connections Management Strategies in Satellite Cellular NetworksFrom EverandConnections Management Strategies in Satellite Cellular NetworksNo ratings yet
- Sist en 10163 1 2005Document9 pagesSist en 10163 1 2005Mohamed AttiaNo ratings yet
- Booklet of StabilityDocument45 pagesBooklet of StabilityMohamed Attia100% (1)
- Grain Loading ManualDocument80 pagesGrain Loading ManualMohamed AttiaNo ratings yet
- Stability BookletDocument84 pagesStability BookletMohamed AttiaNo ratings yet
- 3VL3725 1DC36 0aa0 PDFDocument4 pages3VL3725 1DC36 0aa0 PDFkarian32000No ratings yet
- Department of Mechanical Engineering: Mech412: Machine Design II Second Semester, 2020-2021Document3 pagesDepartment of Mechanical Engineering: Mech412: Machine Design II Second Semester, 2020-2021mhd slmnNo ratings yet
- MOS Manual W-20 With ReadingsDocument71 pagesMOS Manual W-20 With ReadingsMuhammad AmmarNo ratings yet
- Curriculum Vitae: Maneela BajpaiDocument3 pagesCurriculum Vitae: Maneela Bajpaimaneela bajpaiNo ratings yet
- Fusion 360 For BeginnersDocument6 pagesFusion 360 For BeginnersVenkateshYadavCivarla100% (1)
- Article 1496471672Document6 pagesArticle 1496471672Irene KeniaNo ratings yet
- Ladder CatalogDocument20 pagesLadder CataloghazopmanNo ratings yet
- Resume - Structural LabDocument5 pagesResume - Structural Labali bin sefuNo ratings yet
- Ganpat University U.V. Patel College of Engineering Mechatronics Engineering Department Experiment: - 4Document5 pagesGanpat University U.V. Patel College of Engineering Mechatronics Engineering Department Experiment: - 4Jaygopal SharmaNo ratings yet
- Group 2 Specification: 1. Major ComponentDocument12 pagesGroup 2 Specification: 1. Major ComponentREMZONANo ratings yet
- Siti Norzuani - M03 - T5Document4 pagesSiti Norzuani - M03 - T5SITI NORZUANI BINTI BAHARUDDIN MoeNo ratings yet
- Wndw3 PrintDocument520 pagesWndw3 Printx7No ratings yet
- Assignment 3Document7 pagesAssignment 3Midhun MNo ratings yet
- Common Lesson Plan 3 - Kelly SibrianDocument4 pagesCommon Lesson Plan 3 - Kelly Sibrianapi-510450123No ratings yet
- Communications PDFDocument12 pagesCommunications PDFRoger GilbertNo ratings yet
- Troidon66XP enDocument4 pagesTroidon66XP enAlvaro Andres Pinilla TorresNo ratings yet
- Sales Document StructureDocument5 pagesSales Document StructureShashi RayappagariNo ratings yet
- Classified2019 2 3564799 PDFDocument9 pagesClassified2019 2 3564799 PDFaarianNo ratings yet
- Basic Definitions of Business Research MethodsDocument6 pagesBasic Definitions of Business Research MethodsReader100% (2)
- Dubai Metro ProjectDocument67 pagesDubai Metro ProjectMustafa Uzyardoğan100% (4)
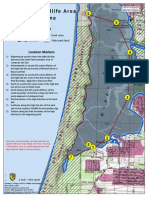
- Morro Bay Wildlife Area Hunt Zone: Map LegendDocument1 pageMorro Bay Wildlife Area Hunt Zone: Map LegendZarahNo ratings yet
- HCI6J 311 312 TD en Rev A de AlescoDocument9 pagesHCI6J 311 312 TD en Rev A de AlescoDomingo RuizNo ratings yet
- Youth Preacher's Training Course APRIL 2020 - Level 1 and 2Document2 pagesYouth Preacher's Training Course APRIL 2020 - Level 1 and 2sanatanNo ratings yet
- D493027 en PDFDocument39 pagesD493027 en PDFJose ValenciaNo ratings yet
- Herbert Simon Model of Decision MakingDocument3 pagesHerbert Simon Model of Decision MakingSachin Raikar100% (2)
- Mechanical and Electrical Events of The Cardiac CycleDocument39 pagesMechanical and Electrical Events of The Cardiac CyclebhatsindhoorNo ratings yet
- D5032408 Setting Up and Using Transportable Cutting and Shaping Machines in The Workplace - LFX - Dec19Document12 pagesD5032408 Setting Up and Using Transportable Cutting and Shaping Machines in The Workplace - LFX - Dec19Himanshu MishraNo ratings yet
- CN - PP - AttendanceDocument10 pagesCN - PP - Attendanceagoyal5145No ratings yet