
Summary Uav Payload
Summary Uav Payload
You might also like
- On ProbabilityDocument13 pagesOn ProbabilitySridhar PantNo ratings yet
- Solving Trusses Including InclinedDocument24 pagesSolving Trusses Including Inclinedjikijoker0% (2)
- Mathematical Modelling of Engineering Problems: Received: 26 June 2022 Accepted: 22 October 2022Document7 pagesMathematical Modelling of Engineering Problems: Received: 26 June 2022 Accepted: 22 October 2022mustafa11dahamNo ratings yet
- Towards Developing Verifiable Neural Network Controller: Completeness of Training Data: Does The RecordedDocument8 pagesTowards Developing Verifiable Neural Network Controller: Completeness of Training Data: Does The Recordedhornet82No ratings yet
- OverviewDocument3 pagesOverviewGopinath SomuNo ratings yet
- Robust Model Reference Controller Design For Different Classes of Nonlinear SystemsDocument24 pagesRobust Model Reference Controller Design For Different Classes of Nonlinear Systemscode adminNo ratings yet
- Stable Adaptive Fuzzy Control of Nonlinear Systems: Li-Xin WangDocument10 pagesStable Adaptive Fuzzy Control of Nonlinear Systems: Li-Xin WangAli Umair KhanNo ratings yet
- TomTat LuanAn Xây Dựng Phương Pháp Tổng Hợp Hệ Điều Khiển Thích Nghi Bền Vững Cho - EnglishDocument27 pagesTomTat LuanAn Xây Dựng Phương Pháp Tổng Hợp Hệ Điều Khiển Thích Nghi Bền Vững Cho - EnglishMan EbookNo ratings yet
- Adaptive ControlDocument30 pagesAdaptive ControlPrateek MathurNo ratings yet
- Adaptive Control: According To Webster's DictionaryDocument20 pagesAdaptive Control: According To Webster's DictionaryMukesh Kumar VarmaNo ratings yet
- 536 (Nguyen)Document20 pages536 (Nguyen)FernandootNo ratings yet
- Diogo Almeida MT 2Document58 pagesDiogo Almeida MT 2pet_alienNo ratings yet
- 88 IjecsDocument15 pages88 IjecsMuhammad RamishNo ratings yet
- Adaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural NetworkDocument10 pagesAdaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural Networkdelima palwa sariNo ratings yet
- Nonlinear Adaptive Flight Control Using Neural NetworksDocument24 pagesNonlinear Adaptive Flight Control Using Neural NetworksAria IraniNo ratings yet
- Aca Module-2Document8 pagesAca Module-220951a2141No ratings yet
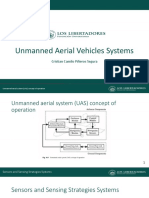
- Unmanned Aerial Vehicles Systems: Cristian Camilo Piñeros SeguraDocument13 pagesUnmanned Aerial Vehicles Systems: Cristian Camilo Piñeros Seguracristian camilo piñeros seguraNo ratings yet
- CCE - 18 Title of The Doctoral Program: Enrico - Canuto@polito - It Carlo - Novara@polito - ItDocument2 pagesCCE - 18 Title of The Doctoral Program: Enrico - Canuto@polito - It Carlo - Novara@polito - ItAbdul Rehman TariqNo ratings yet
- Handout 5 PDFDocument75 pagesHandout 5 PDFHussain SalmanNo ratings yet
- Introduction To Adaptive ControlDocument5 pagesIntroduction To Adaptive ControlroseNo ratings yet
- Pitch ControlDocument14 pagesPitch Controlsakthiya ramNo ratings yet
- MPC Based Trajectory Tracking ControlDocument7 pagesMPC Based Trajectory Tracking Controlzozhany2000No ratings yet
- FYP Synopsis: Design & Implementation of Robotic Arm That Copies Human ArmDocument7 pagesFYP Synopsis: Design & Implementation of Robotic Arm That Copies Human ArmMohsin AhsanNo ratings yet
- constrainedLQR Vehicle Dynamics Applications of Optimal Control TheoryDocument40 pagesconstrainedLQR Vehicle Dynamics Applications of Optimal Control TheoryBRIDGET AUHNo ratings yet
- UAV Adaptive Trajectory Tracking Control Under Unknown Time-Varying Disturbance and Input SaturationDocument35 pagesUAV Adaptive Trajectory Tracking Control Under Unknown Time-Varying Disturbance and Input Saturationhawi abomaNo ratings yet
- Project Dynamic Modelling and Simulation of A Quadrotor For A Predefined TrajectoryDocument19 pagesProject Dynamic Modelling and Simulation of A Quadrotor For A Predefined TrajectorySidharth Suresh KumarNo ratings yet
- Towards Intelligent Autonomous Control Systems Architecture and Fundamental Issues Antsaklis, P. J., Passino, K. M., & Wang, S. J. (1989)Document28 pagesTowards Intelligent Autonomous Control Systems Architecture and Fundamental Issues Antsaklis, P. J., Passino, K. M., & Wang, S. J. (1989)tonykptonyNo ratings yet
- A Trajectory Tracking Control Design For Fixed-Wing Unmanned Aerial VehiclesDocument6 pagesA Trajectory Tracking Control Design For Fixed-Wing Unmanned Aerial Vehicleselguerrero66No ratings yet
- IntroductionDocument66 pagesIntroductionvaniNo ratings yet
- Modeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisDocument7 pagesModeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisFawaz PartoNo ratings yet
- 4 - Improved Altitude Control Algorithm For Quadcopter Unmanned Aerial Vehicles PDFDocument15 pages4 - Improved Altitude Control Algorithm For Quadcopter Unmanned Aerial Vehicles PDFusmancheema81No ratings yet
- Adaptive Control - Wikipedia PDFDocument20 pagesAdaptive Control - Wikipedia PDFig: sidaryNo ratings yet
- Enhancing Performance and Stability of Gain-Scheduling Control SystemDocument21 pagesEnhancing Performance and Stability of Gain-Scheduling Control SystemAisha Sir ElkhatemNo ratings yet
- Lecture 1Document25 pagesLecture 1Munazzah TaimuriNo ratings yet
- Real-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterDocument6 pagesReal-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterasdssNo ratings yet
- InTech-Motion Control of A Quadrotor Aircraft Via Singular Perturbations PDFDocument16 pagesInTech-Motion Control of A Quadrotor Aircraft Via Singular Perturbations PDFOroitz Elgezabal GómezNo ratings yet
- 2010 105 RotaryIPDocument6 pages2010 105 RotaryIPNguyễn Đức SangNo ratings yet
- Applied Sciences: Curved Path Following Control For A Small Fixed-Wing UAV With Parameters AdaptationDocument20 pagesApplied Sciences: Curved Path Following Control For A Small Fixed-Wing UAV With Parameters AdaptationDedy BehiNo ratings yet
- Optimizing Sensor Fusion Algorithms For Target Tracking in UAV SystemsDocument2 pagesOptimizing Sensor Fusion Algorithms For Target Tracking in UAV Systemsabenezer zegeyeNo ratings yet
- Unit 5 UavDocument10 pagesUnit 5 UavAeronautical Engineering HODNo ratings yet
- Automated Guided Vechiles: Suggested Brief AnswersDocument3 pagesAutomated Guided Vechiles: Suggested Brief AnswersmarwenNo ratings yet
- Dynamic Modeling and Control Techniques For A Quadrotor: January 2015Document10 pagesDynamic Modeling and Control Techniques For A Quadrotor: January 2015Naier NabilNo ratings yet
- PLC RedundantDocument1 pagePLC Redundantwalidderbel1981No ratings yet
- Adaptive Control: Non-Identifier-Based: - Gain SchedulingDocument5 pagesAdaptive Control: Non-Identifier-Based: - Gain SchedulingroseNo ratings yet
- Introduction To Adaptive ControlDocument3 pagesIntroduction To Adaptive ControlrajeshmholmukheNo ratings yet
- 2014-Saturated RISE Feedback Control For A Class of 2nd-Order Nonlinear SystemDocument6 pages2014-Saturated RISE Feedback Control For A Class of 2nd-Order Nonlinear Systemlongtrandang5867No ratings yet
- UNIT 3 Condition MonitoringDocument32 pagesUNIT 3 Condition MonitoringVenkadeshwaran KuthalingamNo ratings yet
- Strategies For Automated Maintenance of Belt Conveyor SystemsDocument18 pagesStrategies For Automated Maintenance of Belt Conveyor SystemsDennis MuzilaNo ratings yet
- Fuzzy Control Strategies Development For A 3-DoF RoboticDocument30 pagesFuzzy Control Strategies Development For A 3-DoF RoboticMuhammad SulemanNo ratings yet
- Coombes 2014Document7 pagesCoombes 2014fydhdNo ratings yet
- Control Methods For QuadsDocument28 pagesControl Methods For Quadshw606No ratings yet
- Introduction To Control SystemsDocument90 pagesIntroduction To Control SystemsNuwan HemanthaNo ratings yet
- What Can Be Said About The Controllability and Observability Conditions If The Transfer Function Has PoleDocument6 pagesWhat Can Be Said About The Controllability and Observability Conditions If The Transfer Function Has PoleMengistu BirukeNo ratings yet
- Adaptive Backstepping Ight Control For A mini-UAVDocument18 pagesAdaptive Backstepping Ight Control For A mini-UAVoussama sadkiNo ratings yet
- Synchronous PD Control Using A Time Delay EstimatoDocument21 pagesSynchronous PD Control Using A Time Delay EstimatoDương HồNo ratings yet
- Res 2Document4 pagesRes 2engr_n_n_malikNo ratings yet
- Tracking Flight Control of Quadrotor Based On Disturbance ObserverDocument10 pagesTracking Flight Control of Quadrotor Based On Disturbance ObserverThế Anh NguyễnNo ratings yet
- Flight Control Lecture 3Document56 pagesFlight Control Lecture 3Sahil SahNo ratings yet
- Monitoring and Control of Information-Poor Systems: An Approach based on Fuzzy Relational ModelsFrom EverandMonitoring and Control of Information-Poor Systems: An Approach based on Fuzzy Relational ModelsNo ratings yet
- Robust Output Feedback H-infinity Control and Filtering for Uncertain Linear SystemsFrom EverandRobust Output Feedback H-infinity Control and Filtering for Uncertain Linear SystemsNo ratings yet
- Monte Carlo Statistical MethodsDocument289 pagesMonte Carlo Statistical MethodscasesilvaNo ratings yet
- Topic 5-Abstract Data Structures - Revision - NotesDocument12 pagesTopic 5-Abstract Data Structures - Revision - NotesN100% (1)
- Machine LearningDocument46 pagesMachine LearningPoorna Kalandhar100% (3)
- CH 12 - Managing Inventories in Supply ChainsDocument24 pagesCH 12 - Managing Inventories in Supply ChainsPotatoNo ratings yet
- Advanced OptimizationDocument4 pagesAdvanced OptimizationEduardo RebeloNo ratings yet
- Activity Report No 1-NumsolDocument3 pagesActivity Report No 1-NumsolMaria Kharissa BalingNo ratings yet
- Gauss-Jordan Elimination, Linear Algebra, Alexandria UniversityDocument52 pagesGauss-Jordan Elimination, Linear Algebra, Alexandria UniversitySafety Box graduation project 2023No ratings yet
- Module 4Document11 pagesModule 4monika hcNo ratings yet
- Course Outline ECE682 Multi Variables Control SystemesDocument1 pageCourse Outline ECE682 Multi Variables Control SystemestrebeheiramNo ratings yet
- Genetic Programming: A Seminar OnDocument23 pagesGenetic Programming: A Seminar OnZatin GuptaNo ratings yet
- Cie CS CH7 2Document4 pagesCie CS CH7 2Giga ChadNo ratings yet
- Lesson 2 Mean of A DiscreteDocument23 pagesLesson 2 Mean of A DiscreteDaisy BantugNo ratings yet
- Linear Programming ProblemDocument13 pagesLinear Programming Problemraj100% (1)
- Random Variables and Probability Distributions-II: Mr. Anup SinghDocument43 pagesRandom Variables and Probability Distributions-II: Mr. Anup SinghHari PrakashNo ratings yet
- Markov Chain Monte Carlo and Gibbs SamplingDocument24 pagesMarkov Chain Monte Carlo and Gibbs Samplingp1muellerNo ratings yet
- Ioi 2020 Problem 2Document3 pagesIoi 2020 Problem 2Planeación AcadémicaNo ratings yet
- The Nature of Complex Networks Sergey N Dorogovtsev Full ChapterDocument67 pagesThe Nature of Complex Networks Sergey N Dorogovtsev Full Chapterkevin.verne147100% (13)
- Automatic Estimation of Excavator Actual and Relative Cycle TimesDocument16 pagesAutomatic Estimation of Excavator Actual and Relative Cycle TimesisprengelNo ratings yet
- Month Actual Shed Sales 2-Month MA 3-Month MA 4-Month MADocument17 pagesMonth Actual Shed Sales 2-Month MA 3-Month MA 4-Month MA2k20dmba086 Pawan KumarNo ratings yet
- 1 1optimizationDocument25 pages1 1optimizationAbdul MueedNo ratings yet
- Cigre A2 - 105 - 2014Document8 pagesCigre A2 - 105 - 2014Chris ParkinsonNo ratings yet
- GB ApplicationsDocument29 pagesGB Applicationsrandomrandom221No ratings yet
- G08afc cl06Document5 pagesG08afc cl06Khhg AgddsNo ratings yet
- Li2019 Brains-RegularizeDocument11 pagesLi2019 Brains-RegularizepdkfjzNo ratings yet
- Poles Zeros and System Response Extra Notes Nise 1Document5 pagesPoles Zeros and System Response Extra Notes Nise 1Ian UdhiliNo ratings yet
- MAT13 - Business Algebra Final Exam Set A MAT13 - Business Algebra Final Exam Set CDocument1 pageMAT13 - Business Algebra Final Exam Set A MAT13 - Business Algebra Final Exam Set CchrisNo ratings yet
- Ce348: Information Technology: Credits and Hours: Teaching Scheme Theory Practical Tutorial Total CreditDocument4 pagesCe348: Information Technology: Credits and Hours: Teaching Scheme Theory Practical Tutorial Total CreditChandresh PadmaniNo ratings yet
- Cloudhsm User GuideDocument389 pagesCloudhsm User GuideAnand KumarNo ratings yet
























































































Download as docx, pdf, or txt
You might also like
- On ProbabilityDocument13 pagesOn ProbabilitySridhar PantNo ratings yet
- Solving Trusses Including InclinedDocument24 pagesSolving Trusses Including Inclinedjikijoker0% (2)
- Mathematical Modelling of Engineering Problems: Received: 26 June 2022 Accepted: 22 October 2022Document7 pagesMathematical Modelling of Engineering Problems: Received: 26 June 2022 Accepted: 22 October 2022mustafa11dahamNo ratings yet
- Towards Developing Verifiable Neural Network Controller: Completeness of Training Data: Does The RecordedDocument8 pagesTowards Developing Verifiable Neural Network Controller: Completeness of Training Data: Does The Recordedhornet82No ratings yet
- OverviewDocument3 pagesOverviewGopinath SomuNo ratings yet
- Robust Model Reference Controller Design For Different Classes of Nonlinear SystemsDocument24 pagesRobust Model Reference Controller Design For Different Classes of Nonlinear Systemscode adminNo ratings yet
- Stable Adaptive Fuzzy Control of Nonlinear Systems: Li-Xin WangDocument10 pagesStable Adaptive Fuzzy Control of Nonlinear Systems: Li-Xin WangAli Umair KhanNo ratings yet
- TomTat LuanAn Xây Dựng Phương Pháp Tổng Hợp Hệ Điều Khiển Thích Nghi Bền Vững Cho - EnglishDocument27 pagesTomTat LuanAn Xây Dựng Phương Pháp Tổng Hợp Hệ Điều Khiển Thích Nghi Bền Vững Cho - EnglishMan EbookNo ratings yet
- Adaptive ControlDocument30 pagesAdaptive ControlPrateek MathurNo ratings yet
- Adaptive Control: According To Webster's DictionaryDocument20 pagesAdaptive Control: According To Webster's DictionaryMukesh Kumar VarmaNo ratings yet
- 536 (Nguyen)Document20 pages536 (Nguyen)FernandootNo ratings yet
- Diogo Almeida MT 2Document58 pagesDiogo Almeida MT 2pet_alienNo ratings yet
- 88 IjecsDocument15 pages88 IjecsMuhammad RamishNo ratings yet
- Adaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural NetworkDocument10 pagesAdaptive Sliding Mode Control For Attitude and Altitude System of A Quadcopter UAV Via Neural Networkdelima palwa sariNo ratings yet
- Nonlinear Adaptive Flight Control Using Neural NetworksDocument24 pagesNonlinear Adaptive Flight Control Using Neural NetworksAria IraniNo ratings yet
- Aca Module-2Document8 pagesAca Module-220951a2141No ratings yet
- Unmanned Aerial Vehicles Systems: Cristian Camilo Piñeros SeguraDocument13 pagesUnmanned Aerial Vehicles Systems: Cristian Camilo Piñeros Seguracristian camilo piñeros seguraNo ratings yet
- CCE - 18 Title of The Doctoral Program: Enrico - Canuto@polito - It Carlo - Novara@polito - ItDocument2 pagesCCE - 18 Title of The Doctoral Program: Enrico - Canuto@polito - It Carlo - Novara@polito - ItAbdul Rehman TariqNo ratings yet
- Handout 5 PDFDocument75 pagesHandout 5 PDFHussain SalmanNo ratings yet
- Introduction To Adaptive ControlDocument5 pagesIntroduction To Adaptive ControlroseNo ratings yet
- Pitch ControlDocument14 pagesPitch Controlsakthiya ramNo ratings yet
- MPC Based Trajectory Tracking ControlDocument7 pagesMPC Based Trajectory Tracking Controlzozhany2000No ratings yet
- FYP Synopsis: Design & Implementation of Robotic Arm That Copies Human ArmDocument7 pagesFYP Synopsis: Design & Implementation of Robotic Arm That Copies Human ArmMohsin AhsanNo ratings yet
- constrainedLQR Vehicle Dynamics Applications of Optimal Control TheoryDocument40 pagesconstrainedLQR Vehicle Dynamics Applications of Optimal Control TheoryBRIDGET AUHNo ratings yet
- UAV Adaptive Trajectory Tracking Control Under Unknown Time-Varying Disturbance and Input SaturationDocument35 pagesUAV Adaptive Trajectory Tracking Control Under Unknown Time-Varying Disturbance and Input Saturationhawi abomaNo ratings yet
- Project Dynamic Modelling and Simulation of A Quadrotor For A Predefined TrajectoryDocument19 pagesProject Dynamic Modelling and Simulation of A Quadrotor For A Predefined TrajectorySidharth Suresh KumarNo ratings yet
- Towards Intelligent Autonomous Control Systems Architecture and Fundamental Issues Antsaklis, P. J., Passino, K. M., & Wang, S. J. (1989)Document28 pagesTowards Intelligent Autonomous Control Systems Architecture and Fundamental Issues Antsaklis, P. J., Passino, K. M., & Wang, S. J. (1989)tonykptonyNo ratings yet
- A Trajectory Tracking Control Design For Fixed-Wing Unmanned Aerial VehiclesDocument6 pagesA Trajectory Tracking Control Design For Fixed-Wing Unmanned Aerial Vehicleselguerrero66No ratings yet
- IntroductionDocument66 pagesIntroductionvaniNo ratings yet
- Modeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisDocument7 pagesModeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisFawaz PartoNo ratings yet
- 4 - Improved Altitude Control Algorithm For Quadcopter Unmanned Aerial Vehicles PDFDocument15 pages4 - Improved Altitude Control Algorithm For Quadcopter Unmanned Aerial Vehicles PDFusmancheema81No ratings yet
- Adaptive Control - Wikipedia PDFDocument20 pagesAdaptive Control - Wikipedia PDFig: sidaryNo ratings yet
- Enhancing Performance and Stability of Gain-Scheduling Control SystemDocument21 pagesEnhancing Performance and Stability of Gain-Scheduling Control SystemAisha Sir ElkhatemNo ratings yet
- Lecture 1Document25 pagesLecture 1Munazzah TaimuriNo ratings yet
- Real-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterDocument6 pagesReal-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterasdssNo ratings yet
- InTech-Motion Control of A Quadrotor Aircraft Via Singular Perturbations PDFDocument16 pagesInTech-Motion Control of A Quadrotor Aircraft Via Singular Perturbations PDFOroitz Elgezabal GómezNo ratings yet
- 2010 105 RotaryIPDocument6 pages2010 105 RotaryIPNguyễn Đức SangNo ratings yet
- Applied Sciences: Curved Path Following Control For A Small Fixed-Wing UAV With Parameters AdaptationDocument20 pagesApplied Sciences: Curved Path Following Control For A Small Fixed-Wing UAV With Parameters AdaptationDedy BehiNo ratings yet
- Optimizing Sensor Fusion Algorithms For Target Tracking in UAV SystemsDocument2 pagesOptimizing Sensor Fusion Algorithms For Target Tracking in UAV Systemsabenezer zegeyeNo ratings yet
- Unit 5 UavDocument10 pagesUnit 5 UavAeronautical Engineering HODNo ratings yet
- Automated Guided Vechiles: Suggested Brief AnswersDocument3 pagesAutomated Guided Vechiles: Suggested Brief AnswersmarwenNo ratings yet
- Dynamic Modeling and Control Techniques For A Quadrotor: January 2015Document10 pagesDynamic Modeling and Control Techniques For A Quadrotor: January 2015Naier NabilNo ratings yet
- PLC RedundantDocument1 pagePLC Redundantwalidderbel1981No ratings yet
- Adaptive Control: Non-Identifier-Based: - Gain SchedulingDocument5 pagesAdaptive Control: Non-Identifier-Based: - Gain SchedulingroseNo ratings yet
- Introduction To Adaptive ControlDocument3 pagesIntroduction To Adaptive ControlrajeshmholmukheNo ratings yet
- 2014-Saturated RISE Feedback Control For A Class of 2nd-Order Nonlinear SystemDocument6 pages2014-Saturated RISE Feedback Control For A Class of 2nd-Order Nonlinear Systemlongtrandang5867No ratings yet
- UNIT 3 Condition MonitoringDocument32 pagesUNIT 3 Condition MonitoringVenkadeshwaran KuthalingamNo ratings yet
- Strategies For Automated Maintenance of Belt Conveyor SystemsDocument18 pagesStrategies For Automated Maintenance of Belt Conveyor SystemsDennis MuzilaNo ratings yet
- Fuzzy Control Strategies Development For A 3-DoF RoboticDocument30 pagesFuzzy Control Strategies Development For A 3-DoF RoboticMuhammad SulemanNo ratings yet
- Coombes 2014Document7 pagesCoombes 2014fydhdNo ratings yet
- Control Methods For QuadsDocument28 pagesControl Methods For Quadshw606No ratings yet
- Introduction To Control SystemsDocument90 pagesIntroduction To Control SystemsNuwan HemanthaNo ratings yet
- What Can Be Said About The Controllability and Observability Conditions If The Transfer Function Has PoleDocument6 pagesWhat Can Be Said About The Controllability and Observability Conditions If The Transfer Function Has PoleMengistu BirukeNo ratings yet
- Adaptive Backstepping Ight Control For A mini-UAVDocument18 pagesAdaptive Backstepping Ight Control For A mini-UAVoussama sadkiNo ratings yet
- Synchronous PD Control Using A Time Delay EstimatoDocument21 pagesSynchronous PD Control Using A Time Delay EstimatoDương HồNo ratings yet
- Res 2Document4 pagesRes 2engr_n_n_malikNo ratings yet
- Tracking Flight Control of Quadrotor Based On Disturbance ObserverDocument10 pagesTracking Flight Control of Quadrotor Based On Disturbance ObserverThế Anh NguyễnNo ratings yet
- Flight Control Lecture 3Document56 pagesFlight Control Lecture 3Sahil SahNo ratings yet
- Monitoring and Control of Information-Poor Systems: An Approach based on Fuzzy Relational ModelsFrom EverandMonitoring and Control of Information-Poor Systems: An Approach based on Fuzzy Relational ModelsNo ratings yet
- Robust Output Feedback H-infinity Control and Filtering for Uncertain Linear SystemsFrom EverandRobust Output Feedback H-infinity Control and Filtering for Uncertain Linear SystemsNo ratings yet
- Monte Carlo Statistical MethodsDocument289 pagesMonte Carlo Statistical MethodscasesilvaNo ratings yet
- Topic 5-Abstract Data Structures - Revision - NotesDocument12 pagesTopic 5-Abstract Data Structures - Revision - NotesN100% (1)
- Machine LearningDocument46 pagesMachine LearningPoorna Kalandhar100% (3)
- CH 12 - Managing Inventories in Supply ChainsDocument24 pagesCH 12 - Managing Inventories in Supply ChainsPotatoNo ratings yet
- Advanced OptimizationDocument4 pagesAdvanced OptimizationEduardo RebeloNo ratings yet
- Activity Report No 1-NumsolDocument3 pagesActivity Report No 1-NumsolMaria Kharissa BalingNo ratings yet
- Gauss-Jordan Elimination, Linear Algebra, Alexandria UniversityDocument52 pagesGauss-Jordan Elimination, Linear Algebra, Alexandria UniversitySafety Box graduation project 2023No ratings yet
- Module 4Document11 pagesModule 4monika hcNo ratings yet
- Course Outline ECE682 Multi Variables Control SystemesDocument1 pageCourse Outline ECE682 Multi Variables Control SystemestrebeheiramNo ratings yet
- Genetic Programming: A Seminar OnDocument23 pagesGenetic Programming: A Seminar OnZatin GuptaNo ratings yet
- Cie CS CH7 2Document4 pagesCie CS CH7 2Giga ChadNo ratings yet
- Lesson 2 Mean of A DiscreteDocument23 pagesLesson 2 Mean of A DiscreteDaisy BantugNo ratings yet
- Linear Programming ProblemDocument13 pagesLinear Programming Problemraj100% (1)
- Random Variables and Probability Distributions-II: Mr. Anup SinghDocument43 pagesRandom Variables and Probability Distributions-II: Mr. Anup SinghHari PrakashNo ratings yet
- Markov Chain Monte Carlo and Gibbs SamplingDocument24 pagesMarkov Chain Monte Carlo and Gibbs Samplingp1muellerNo ratings yet
- Ioi 2020 Problem 2Document3 pagesIoi 2020 Problem 2Planeación AcadémicaNo ratings yet
- The Nature of Complex Networks Sergey N Dorogovtsev Full ChapterDocument67 pagesThe Nature of Complex Networks Sergey N Dorogovtsev Full Chapterkevin.verne147100% (13)
- Automatic Estimation of Excavator Actual and Relative Cycle TimesDocument16 pagesAutomatic Estimation of Excavator Actual and Relative Cycle TimesisprengelNo ratings yet
- Month Actual Shed Sales 2-Month MA 3-Month MA 4-Month MADocument17 pagesMonth Actual Shed Sales 2-Month MA 3-Month MA 4-Month MA2k20dmba086 Pawan KumarNo ratings yet
- 1 1optimizationDocument25 pages1 1optimizationAbdul MueedNo ratings yet
- Cigre A2 - 105 - 2014Document8 pagesCigre A2 - 105 - 2014Chris ParkinsonNo ratings yet
- GB ApplicationsDocument29 pagesGB Applicationsrandomrandom221No ratings yet
- G08afc cl06Document5 pagesG08afc cl06Khhg AgddsNo ratings yet
- Li2019 Brains-RegularizeDocument11 pagesLi2019 Brains-RegularizepdkfjzNo ratings yet
- Poles Zeros and System Response Extra Notes Nise 1Document5 pagesPoles Zeros and System Response Extra Notes Nise 1Ian UdhiliNo ratings yet
- MAT13 - Business Algebra Final Exam Set A MAT13 - Business Algebra Final Exam Set CDocument1 pageMAT13 - Business Algebra Final Exam Set A MAT13 - Business Algebra Final Exam Set CchrisNo ratings yet
- Ce348: Information Technology: Credits and Hours: Teaching Scheme Theory Practical Tutorial Total CreditDocument4 pagesCe348: Information Technology: Credits and Hours: Teaching Scheme Theory Practical Tutorial Total CreditChandresh PadmaniNo ratings yet
- Cloudhsm User GuideDocument389 pagesCloudhsm User GuideAnand KumarNo ratings yet