Download as pdf or txt
You might also like
- 507 Mechanical Movements: Mechanisms and DevicesFrom Everand507 Mechanical Movements: Mechanisms and DevicesRating: 4 out of 5 stars4/5 (28)
- Elenco Apparati AvioniciDocument53 pagesElenco Apparati AvioniciStrawichDaniel25% (4)
- Inversion of 4 Bar MechanismDocument6 pagesInversion of 4 Bar MechanismMegh Bantawa100% (1)
- Tool RetrivelDocument42 pagesTool RetrivelganeshNo ratings yet
- Study On Swing MachineDocument3 pagesStudy On Swing MachineKazi AnisurNo ratings yet
- Four Bar LinkageDocument9 pagesFour Bar LinkageAliceAlormenuNo ratings yet
- Experiment No 3 DynamicsDocument7 pagesExperiment No 3 DynamicsAliNo ratings yet
- KOM Unit-1 PDFDocument18 pagesKOM Unit-1 PDFpuneethNo ratings yet
- Theory of Machine and MechanismsDocument21 pagesTheory of Machine and MechanismssrujanNo ratings yet
- 5 Planar Linkages: 5.1.1 What Are Linkage Mechanisms?Document10 pages5 Planar Linkages: 5.1.1 What Are Linkage Mechanisms?Ashish SinglaNo ratings yet
- Crank and Slotted Lever Quick Return (Rev2)Document9 pagesCrank and Slotted Lever Quick Return (Rev2)Vipin YadavNo ratings yet
- Chapter Two 2. Linkages MechanismsDocument41 pagesChapter Two 2. Linkages Mechanismssamuel mechNo ratings yet
- Chapter 2 Common MechanismsDocument58 pagesChapter 2 Common Mechanismsrobel metikuNo ratings yet
- Planar LinkagesDocument8 pagesPlanar LinkagesAlbert ArominNo ratings yet
- Four Bar MechanismDocument34 pagesFour Bar Mechanismumair rasheed100% (1)
- Pimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismDocument43 pagesPimpri Chinchwad Polytechnic, Nigdi: Chapter 01-Inversions of MechanismNarendra ChavdaNo ratings yet
- Fourbar Linkage 2024Document10 pagesFourbar Linkage 2024ndbira5No ratings yet
- Kinematics of MachineryDocument64 pagesKinematics of MachineryarulmuruganNo ratings yet
- Kom LabDocument15 pagesKom LabNitin KurupNo ratings yet
- Inversion of MechanismsDocument15 pagesInversion of MechanismsAkunwa GideonNo ratings yet
- Four LinkDocument19 pagesFour LinkBHAVESH JOSHINo ratings yet
- INVERSIONS of MECHANISMSDocument39 pagesINVERSIONS of MECHANISMSDibakar ThakurNo ratings yet
- Summary of Previous LectureDocument24 pagesSummary of Previous LecturebharatNo ratings yet
- Kinematic InversionsDocument22 pagesKinematic InversionsrgvdihfNo ratings yet
- 21 - 1-Kinematic Inversion and Grashof - S Criteria - Student NoteDocument2 pages21 - 1-Kinematic Inversion and Grashof - S Criteria - Student NoteNishant DeyNo ratings yet
- TOM Exp.Document9 pagesTOM Exp.Aneesh KumarNo ratings yet
- Lecture - 2 - Inversion of MechanismDocument34 pagesLecture - 2 - Inversion of MechanismGorkha EngineeringNo ratings yet
- Theory of Machines - Lab ManualDocument28 pagesTheory of Machines - Lab ManualHoneyNo ratings yet
- Planar Linkages: Looking For GATE Preparation Material? Join & Get Here Now!Document9 pagesPlanar Linkages: Looking For GATE Preparation Material? Join & Get Here Now!Akash SoniNo ratings yet
- CHAPTER 2-Linkages - 2023 FinalDocument46 pagesCHAPTER 2-Linkages - 2023 Finalaymane dibNo ratings yet
- Four-Bar MechanismDocument13 pagesFour-Bar MechanismHaqeem SNo ratings yet
- Sewing Machine SolutionDocument7 pagesSewing Machine SolutionRafiaNo ratings yet
- KOM ProjectDocument15 pagesKOM ProjectArvene Binmer JesaryNo ratings yet
- Four Bar LinkageDocument13 pagesFour Bar LinkageAnupGautamNo ratings yet
- Me6401 Kom Notes RejinpaulDocument64 pagesMe6401 Kom Notes RejinpaulkjsdjsdaNo ratings yet
- Bybliographycal Research of Analysis of MechanismsDocument9 pagesBybliographycal Research of Analysis of MechanismsJuanca SolorioNo ratings yet
- MoM Expt03 Theory Pos SliderCrank Ver01Document9 pagesMoM Expt03 Theory Pos SliderCrank Ver01krunal07786No ratings yet
- Theory of Machine - Kme 603 Question BankDocument11 pagesTheory of Machine - Kme 603 Question BankPrabal SinghNo ratings yet
- Introduction To Mechanisms: Rapid Design Through Virtual and Physical PrototypingDocument7 pagesIntroduction To Mechanisms: Rapid Design Through Virtual and Physical PrototypingstdropboxNo ratings yet
- Lecturer Notes - Kinematics of MachineryDocument65 pagesLecturer Notes - Kinematics of Machineryehsan_shameli100% (1)
- Kinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksDocument32 pagesKinematics of Machines (Me1252) UNIT-1 Simple Mechanism. Two MarksRameez FaroukNo ratings yet
- Bme Lab Manual FeDocument37 pagesBme Lab Manual FeArpit PangariaNo ratings yet
- Theory of Machines Practical File: Prof. R. A. KhanDocument33 pagesTheory of Machines Practical File: Prof. R. A. KhanBarbie JooNo ratings yet
- II Mechanisms of Machinery Chapter 2 LinkagesDocument62 pagesII Mechanisms of Machinery Chapter 2 LinkagesgalataataaddesaaNo ratings yet
- Chapter 5. Planar LinkagesDocument8 pagesChapter 5. Planar LinkagesBasudeb ShitNo ratings yet
- Laboratory Manual MEC229: Theory of Machines LaboratoryDocument51 pagesLaboratory Manual MEC229: Theory of Machines Laboratoryhemanth singhNo ratings yet
- Chapter 03 - Mechanism and Linkages - Part BDocument37 pagesChapter 03 - Mechanism and Linkages - Part BMuaz FadzilNo ratings yet
- Module 1 - MechanismsDocument41 pagesModule 1 - MechanismsB03Kavya MNo ratings yet
- Kinematics OF Machinery: Adithya Institute of TechnologyDocument34 pagesKinematics OF Machinery: Adithya Institute of TechnologybalajimetturNo ratings yet
- 4 Bar MechanismsDocument49 pages4 Bar MechanismsFrank SandorNo ratings yet
- Final TOM Lab Manual New PDFDocument10 pagesFinal TOM Lab Manual New PDFdab111No ratings yet
- TOM EME-653 lAB MANUAL1Document41 pagesTOM EME-653 lAB MANUAL1kotika_somarajuNo ratings yet
- Report of Mechanics of Machines 1Document12 pagesReport of Mechanics of Machines 1muhammaduzairNo ratings yet
- Experiment of Mechanical EgineeringDocument66 pagesExperiment of Mechanical EgineeringAmin MalikNo ratings yet
- 1.1 Types of MechanismsDocument17 pages1.1 Types of MechanismsKatty SaucedaNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Evolution of Metamorphic Belts: by Akiho Miyashiro Geological Institute, Faculty of Science, University of Tokyo, JapanDocument35 pagesEvolution of Metamorphic Belts: by Akiho Miyashiro Geological Institute, Faculty of Science, University of Tokyo, Japansahil.s237192101No ratings yet
- Butler 1982Document7 pagesButler 1982sahil.s237192101No ratings yet
- Modern Digital ElectronicsDocument4 pagesModern Digital Electronicssahil.s237192101No ratings yet
- Beikmann JVA 1996Document8 pagesBeikmann JVA 1996sahil.s237192101No ratings yet
- Kinematic Analysis of Automated EllipticDocument5 pagesKinematic Analysis of Automated Ellipticsahil.s237192101No ratings yet
- Ict1 July2014 ColorDocument289 pagesIct1 July2014 ColorLawrence ManaliliNo ratings yet
- 16 e Chapter 10Document29 pages16 e Chapter 10Yuki MiharuNo ratings yet
- IESL EstimateDocument14 pagesIESL EstimateAnuranga SahampathNo ratings yet
- Upper GI BleedingDocument30 pagesUpper GI BleedingBibek GhimireNo ratings yet
- WYOMING - Tier II Reporting InstructionsDocument8 pagesWYOMING - Tier II Reporting InstructionsElisa CanoNo ratings yet
- Fill-A-Pix SamplerDocument7 pagesFill-A-Pix SamplerJavier Abarca ObregonNo ratings yet
- 2014 IGEM Malaysia Contact ListDocument4 pages2014 IGEM Malaysia Contact ListLazy DogNo ratings yet
- Araldite PW 1036 Hardener HW 1036: Product Data SheetDocument4 pagesAraldite PW 1036 Hardener HW 1036: Product Data SheetAhmed HusseinNo ratings yet
- Principles of TaxationDocument11 pagesPrinciples of TaxationJay GamboaNo ratings yet
- IECEx TCD 02 Scheme Ed 8.1Document110 pagesIECEx TCD 02 Scheme Ed 8.1Luís Felipe SchrirNo ratings yet
- Gender and Diversity in Social AdministrationDocument10 pagesGender and Diversity in Social AdministrationKrishian Erl AndogNo ratings yet
- Disk Tools and Data Capture: Name From DescriptionDocument10 pagesDisk Tools and Data Capture: Name From Descriptionoh ohoNo ratings yet
- Interview Assessment FormDocument3 pagesInterview Assessment FormCristina BocanialaNo ratings yet
- Introduction of EDFADocument22 pagesIntroduction of EDFAArifiana Satya NastitiNo ratings yet
- CKP-Live 2010Document40 pagesCKP-Live 2010web_therippersNo ratings yet
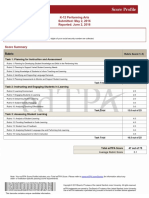
- EdtpaDocument7 pagesEdtpaapi-310967404No ratings yet
- Business Analysis Fundamentals PDFDocument22 pagesBusiness Analysis Fundamentals PDFsaravanan_mcNo ratings yet
- SANITARY PERMIT YampleDocument6 pagesSANITARY PERMIT Yamplekimmy100% (1)
- 1.8L - Engine - Motronic Multiport Fuel Injection (MFI) 132 KDocument18 pages1.8L - Engine - Motronic Multiport Fuel Injection (MFI) 132 KSteeven RodriguezNo ratings yet
- Business Plan: Entrepreneurship ProjectDocument29 pagesBusiness Plan: Entrepreneurship ProjectÃpõõrv ShãrmãNo ratings yet
- The Impact of The Internet and Social Media On BusinessesDocument11 pagesThe Impact of The Internet and Social Media On BusinessesNiomi Golrai100% (1)
- BV Rules - Nr529Document144 pagesBV Rules - Nr529Vasiljka Đordan JelacaNo ratings yet
- 9661B 000 JSD 1900 911 - RCDocument38 pages9661B 000 JSD 1900 911 - RCSasidhar ThamilNo ratings yet
- Cash Flows AccountingDocument9 pagesCash Flows AccountingRosa Villaluz BanairaNo ratings yet
- END SEMESTER EXAMINATION SCHEDULE OF AUTUMN SEMESTER 2023-24, B. Tech. (Hons.)Document5 pagesEND SEMESTER EXAMINATION SCHEDULE OF AUTUMN SEMESTER 2023-24, B. Tech. (Hons.)Pallav SumanNo ratings yet
- TATA Nano Owners Manual-4Document9 pagesTATA Nano Owners Manual-4NikhitaNo ratings yet
- How To Use The USCIS Policy Manual WebsiteDocument12 pagesHow To Use The USCIS Policy Manual WebsitemikollimNo ratings yet
- Quasi Turbine 140505201837 Phpapp01Document16 pagesQuasi Turbine 140505201837 Phpapp01pravesh singh100% (1)
- Ilabz Technology-Sr. IT RecruiterDocument4 pagesIlabz Technology-Sr. IT RecruiterLuis VivasNo ratings yet