Download as pdf or txt
You might also like
- Paper Machine Vacuum Selection FactorsDocument19 pagesPaper Machine Vacuum Selection FactorsJean Dias100% (7)
- Programming with MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandProgramming with MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 4.5 out of 5 stars4.5/5 (3)
- MCQs Unit 2 Sources of Collection of DataDocument9 pagesMCQs Unit 2 Sources of Collection of DataJohn Mohammad100% (1)
- Book of NaicDocument13 pagesBook of NaicHard LifeNo ratings yet
- Lab 2Document3 pagesLab 2Mohd FazliNo ratings yet
- Scilab and Scicos RevisedDocument143 pagesScilab and Scicos RevisedbnatarajNo ratings yet
- MATLAB Formatting FunctionsDocument33 pagesMATLAB Formatting FunctionsRaushan PandeyNo ratings yet
- Lambda Function: FrozensetsDocument2 pagesLambda Function: FrozensetsBhashkar JhaNo ratings yet
- Eee 336 L1&2Document24 pagesEee 336 L1&2Rezwan ZakariaNo ratings yet
- Control Systems Lab 01Document11 pagesControl Systems Lab 01Shanawar AliNo ratings yet
- M05 - Programming in Matlab - XXXX - CH05Document38 pagesM05 - Programming in Matlab - XXXX - CH05Insignia D.No ratings yet
- DSP Lab ManualDocument67 pagesDSP Lab Manualloststranger990100% (1)
- Lecture 3-Script and FunctionDocument28 pagesLecture 3-Script and FunctionViet PhamNo ratings yet
- NEOM Lab Manual - Experiment 1 To 5Document46 pagesNEOM Lab Manual - Experiment 1 To 5prakashchittora6421No ratings yet
- Appendix B - MATLAB RefresherDocument22 pagesAppendix B - MATLAB RefresherreallidongzeNo ratings yet
- Activity #1Document7 pagesActivity #1joyce ramirezNo ratings yet
- Inverse Laplace Transforms With MATLABDocument8 pagesInverse Laplace Transforms With MATLABAmeen Al-ModafferNo ratings yet
- Matlab For Assignments and Projects - A Brief Guide.: R. W. MossDocument32 pagesMatlab For Assignments and Projects - A Brief Guide.: R. W. MossAfaq SaleemNo ratings yet
- Matlab Tutorial2Document46 pagesMatlab Tutorial2Asterix83% (12)
- Numerical Methods in Engineering With MATLAB - 2005 (2) - 10-36 PDFDocument27 pagesNumerical Methods in Engineering With MATLAB - 2005 (2) - 10-36 PDFSultan Al-SaiariNo ratings yet
- CSE Lab ManualDocument45 pagesCSE Lab Manualnixajo1371No ratings yet
- Symbolic Math in MatlabDocument2 pagesSymbolic Math in MatlabSiddarthan MohanNo ratings yet
- Introduction To Matlab: Sudin KulkarniDocument39 pagesIntroduction To Matlab: Sudin KulkarnisbkulkNo ratings yet
- ECE5117MLA1: Laplace & Inverse Laplace Transforms Computer SimulationDocument4 pagesECE5117MLA1: Laplace & Inverse Laplace Transforms Computer SimulationKathleen CornejoNo ratings yet
- MatlabDocument58 pagesMatlabAbdullah EjazNo ratings yet
- Learning From Data 1 Introduction To Matlab: BackgroundDocument8 pagesLearning From Data 1 Introduction To Matlab: Backgrounddadado98No ratings yet
- Scilab Overview and BasicsDocument31 pagesScilab Overview and BasicsRaushan PandeyNo ratings yet
- Matlab Laboratory 1. Introduction To MATLABDocument8 pagesMatlab Laboratory 1. Introduction To MATLABRadu NiculaeNo ratings yet
- MatLab and Solving EquationsDocument170 pagesMatLab and Solving EquationsJulia-e Regina-e AlexandreNo ratings yet
- 472 Assignment 6Document5 pages472 Assignment 6zippedglassesNo ratings yet
- Pakistan Electric LabDocument8 pagesPakistan Electric LabMuhammad Nouman KhanNo ratings yet
- Introduction To MATLAB (Based On Matlab Manual) : Signal and System Theory II, SS 2011Document13 pagesIntroduction To MATLAB (Based On Matlab Manual) : Signal and System Theory II, SS 2011ranjithNo ratings yet
- Matlab Chapter 6Document28 pagesMatlab Chapter 6peprahkofi05No ratings yet
- The Lambda Library: Lambda Abstraction in C++Document12 pagesThe Lambda Library: Lambda Abstraction in C++GonzalysNo ratings yet
- Getting Started With MATLAB - Part1Document15 pagesGetting Started With MATLAB - Part1Rav ChumberNo ratings yet
- 2.1 FunctionsDocument17 pages2.1 FunctionsMuneer AlburayhNo ratings yet
- Lab 04 - Husnain ZDocument10 pagesLab 04 - Husnain ZMuhammad MohsinNo ratings yet
- Labno8: Fourier Transform &inverse Fourier TransformDocument6 pagesLabno8: Fourier Transform &inverse Fourier TransformSyed Waqas ShahNo ratings yet
- C++Lang Chap2Document12 pagesC++Lang Chap2samaanNo ratings yet
- Exp2 SIGPRODocument12 pagesExp2 SIGPROJerome FresadoNo ratings yet
- Lab 1Document18 pagesLab 1mannnn014No ratings yet
- MATLAB Lecture 4. Programming in MATLAB: 4.1 Setting The Search PathDocument5 pagesMATLAB Lecture 4. Programming in MATLAB: 4.1 Setting The Search PathcrsarinNo ratings yet
- Lab1 AiDocument13 pagesLab1 AiEngineering RubixNo ratings yet
- BasicsDocument6 pagesBasicsRitu MaheshwariNo ratings yet
- LAB ACTIVITY 1 - Introduction To MATLAB PART1Document19 pagesLAB ACTIVITY 1 - Introduction To MATLAB PART1Zedrik MojicaNo ratings yet
- Modern Control System TutorialDocument134 pagesModern Control System TutorialUtn LeoNo ratings yet
- MATLAB - OverviewDocument13 pagesMATLAB - OverviewPraveen Kumar LakkimsettiNo ratings yet
- Matlab Tut BasicDocument8 pagesMatlab Tut BasicAndry BellehNo ratings yet
- Control Systems: Lab ManualDocument40 pagesControl Systems: Lab ManualMahmood BhaiNo ratings yet
- Chapter 2: Introduction To MATLAB Programming: January 2017Document14 pagesChapter 2: Introduction To MATLAB Programming: January 2017Pandu KNo ratings yet
- Notes On MATLAB ProgrammingDocument14 pagesNotes On MATLAB ProgrammingrikeshsemailNo ratings yet
- Matlab Programming, IO, and StringsDocument18 pagesMatlab Programming, IO, and StringsSumon DharaNo ratings yet
- MATLAB Fundamentals Quick ReferenceDocument50 pagesMATLAB Fundamentals Quick ReferenceEdrian PentadoNo ratings yet
- Introduction To Matlab-Lecture 1Document31 pagesIntroduction To Matlab-Lecture 1Chit Oo MonNo ratings yet
- Single Static AssignmentDocument9 pagesSingle Static AssignmentchcsisfngNo ratings yet
- Lab 4 After Covid - 19Document8 pagesLab 4 After Covid - 19Ameer saidNo ratings yet
- Control Manual FinalDocument65 pagesControl Manual Finalfeeta singhNo ratings yet
- Cokasaki@cs - Cmu.edu Petel@cs - Cmu.edu Dtarditi@cs - Cmu.edu School of Computer Science, Carnegie Mellon University, Pittsburgh, PA 15213Document25 pagesCokasaki@cs - Cmu.edu Petel@cs - Cmu.edu Dtarditi@cs - Cmu.edu School of Computer Science, Carnegie Mellon University, Pittsburgh, PA 15213Dom MillsNo ratings yet
- Matlab Resource SeminarDocument13 pagesMatlab Resource Seminarcute_atisNo ratings yet
- Lab1 - Intro To Matlab, SimulinkDocument14 pagesLab1 - Intro To Matlab, SimulinkChris EvanNo ratings yet
- A++ and the Lambda Calculus: Principles of Functional ProgrammingFrom EverandA++ and the Lambda Calculus: Principles of Functional ProgrammingRating: 3 out of 5 stars3/5 (1)
- Can Bus Standalone ControllerDocument24 pagesCan Bus Standalone ControllerDoan Van TuanNo ratings yet
- Gis 1Document36 pagesGis 1Jaspreet KapoorNo ratings yet
- Brochure-1Document1 pageBrochure-1Shantanu WaghmareNo ratings yet
- R16 BEST ETHIOPIA Birhanu Belay (Classification Model For Ethiopian Traditional Music Video Using CNN)Document70 pagesR16 BEST ETHIOPIA Birhanu Belay (Classification Model For Ethiopian Traditional Music Video Using CNN)Roorroo GabrummàaNo ratings yet
- MU193 Homework Help 4Document5 pagesMU193 Homework Help 4Ivy SantiagoNo ratings yet
- Exemple - CV - Ing ProdDocument3 pagesExemple - CV - Ing ProdWolfpackxx86No ratings yet
- Counter-Electronics High-Powered Microwave Advanced Missile ProjectDocument4 pagesCounter-Electronics High-Powered Microwave Advanced Missile ProjectJoshua ButhelloNo ratings yet
- 중소기업기술로드맵2022-2024 blockchainDocument363 pages중소기업기술로드맵2022-2024 blockchainTaehyung KimNo ratings yet
- Iglesia John ZedrickDocument34 pagesIglesia John ZedrickJOHN ZEDRICK IGLESIANo ratings yet
- User Manual: Installation Industrial ETHERNET Rail Switch RS20/RS30 FamilyDocument32 pagesUser Manual: Installation Industrial ETHERNET Rail Switch RS20/RS30 FamilySupolNo ratings yet
- Ask Analytics - Text Mining in R - Part 3Document5 pagesAsk Analytics - Text Mining in R - Part 3norelkysNo ratings yet
- 01.01 TPB SubscriptionsDocument15 pages01.01 TPB SubscriptionsaNo ratings yet
- Symantec DLP 14.0 Install Guide WinDocument143 pagesSymantec DLP 14.0 Install Guide WinShantanu100% (1)
- Unit 1information and System ConceptsDocument34 pagesUnit 1information and System ConceptsKanchan SengarNo ratings yet
- Arduino Uno: Pin DescriptionDocument6 pagesArduino Uno: Pin DescriptionRuhina Ashfaq100% (1)
- C-NEToran Technologies VSAT INTERNET LINK QUOTE 4-10-2021Document2 pagesC-NEToran Technologies VSAT INTERNET LINK QUOTE 4-10-2021kayode AdebayoNo ratings yet
- Hitachi OESDocument2 pagesHitachi OESRahul DubeyNo ratings yet
- Immersion Project Study ALVAR JHANYLLA BDocument3 pagesImmersion Project Study ALVAR JHANYLLA BJhanylla AlvarNo ratings yet
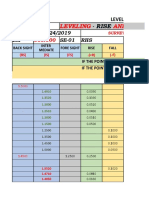
- Leveling AND Calculation: - Rise Fall MethodeDocument9 pagesLeveling AND Calculation: - Rise Fall MethodeKhajaNo ratings yet
- Cryptography Session 2020 v1Document98 pagesCryptography Session 2020 v1GlmNo ratings yet
- Amazon Pay KYC - Training PPT For VendorsDocument19 pagesAmazon Pay KYC - Training PPT For Vendorskaran patelNo ratings yet
- College of Arts and Sciences: Module For Bpo 1 - Fundamentals of Bpo 1Document16 pagesCollege of Arts and Sciences: Module For Bpo 1 - Fundamentals of Bpo 1Neivil Jean N. EgoniaNo ratings yet
- PRR CalculationDocument4 pagesPRR CalculationnavitaNo ratings yet
- Handbook On Indian Railway Standard Drawings & Specifications For SignallingDocument48 pagesHandbook On Indian Railway Standard Drawings & Specifications For SignallingsreelukkyNo ratings yet
- COMMANDER Products Data Sheet: PC Configuration SoftwareDocument4 pagesCOMMANDER Products Data Sheet: PC Configuration SoftwareTawanda MandazaNo ratings yet
- Offshore Structures Under Earthquake Loads: 22.1 GeneralDocument12 pagesOffshore Structures Under Earthquake Loads: 22.1 GeneralIrfan KhanNo ratings yet
- Chapter 2 - Organization and Presentation of Data: Learning OutcomesDocument8 pagesChapter 2 - Organization and Presentation of Data: Learning OutcomesWai KikiNo ratings yet
- 321 23163 0 5962 9076501m2aDocument11 pages321 23163 0 5962 9076501m2aOshun76No ratings yet