
Risk Fagerjord
Risk Fagerjord
You might also like
- Review (PDF) Statics and Strength of Materials 7th EditionDocument5 pagesReview (PDF) Statics and Strength of Materials 7th EditionNeci Cardeno0% (1)
- 737 Performance Reference Handbook - EASA EditionFrom Everand737 Performance Reference Handbook - EASA EditionRating: 4.5 out of 5 stars4.5/5 (3)
- r600 8 104Document247 pagesr600 8 104Mark Cheney100% (1)
- Airbus Revised Briefing InfoDocument9 pagesAirbus Revised Briefing InfoSrinath S. BhaumikNo ratings yet
- A.Nazarov - Small Patrol Boats - SelfRightingDocument9 pagesA.Nazarov - Small Patrol Boats - SelfRightingVladNo ratings yet
- 50037-ME-DOC-001 - Marine Spread Specifications and Certifications DossierDocument9 pages50037-ME-DOC-001 - Marine Spread Specifications and Certifications DossierseehariNo ratings yet
- Aon CoCubes - Manufacturing Case StudiesDocument10 pagesAon CoCubes - Manufacturing Case StudiesAnonymous z6HQR9VNo ratings yet
- Investigation Shows Officer Falsified ReportDocument7 pagesInvestigation Shows Officer Falsified ReportLas Vegas Review-Journal100% (1)
- DP Systems Chapter 5Document13 pagesDP Systems Chapter 5Lachin Kike100% (1)
- DP Operations Guidelines - SEACORDocument7 pagesDP Operations Guidelines - SEACORRoyNo ratings yet
- On DP Vessel ClassificationDocument20 pagesOn DP Vessel ClassificationDaniloNo ratings yet
- New Petrobras Concepts For WSOG (Well Specific Operating Guidelines)Document16 pagesNew Petrobras Concepts For WSOG (Well Specific Operating Guidelines)Xa MauNo ratings yet
- DP Event Bulletin 04 23Document14 pagesDP Event Bulletin 04 23Sorin VirlanNo ratings yet
- Redundant Propulsion: ShipsDocument8 pagesRedundant Propulsion: ShipsLyubomir LazarovNo ratings yet
- Thruster EffectivityDocument190 pagesThruster Effectivityronny-su100% (2)
- Dynamic PositioningDocument74 pagesDynamic PositioningMarc AlfredNo ratings yet
- VAVLINE-Vessel Intervention-IRM Method StatementDocument18 pagesVAVLINE-Vessel Intervention-IRM Method StatementlupiNo ratings yet
- Brochure o P CPP Propeller SystemsDocument8 pagesBrochure o P CPP Propeller SystemsalmondayNo ratings yet
- ASOG Owning and Managing Operational RiskDocument10 pagesASOG Owning and Managing Operational RiskAnatoliy Savelyev100% (1)
- Maintenance and LogisticDocument4 pagesMaintenance and LogisticKesma HimaspalNo ratings yet
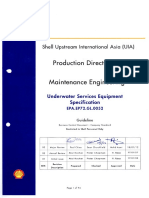
- 02 EPA EP72 GL 0052 Underwater Services Equipment SpecificationDocument94 pages02 EPA EP72 GL 0052 Underwater Services Equipment Specificationvijuindia1111No ratings yet
- Annex EASA TCDS A.114 - (IM) - Beriev - BE 200ES E - (Restricted) Suspended PDFDocument72 pagesAnnex EASA TCDS A.114 - (IM) - Beriev - BE 200ES E - (Restricted) Suspended PDFSamNo ratings yet
- US Army Aerial Delivery 1 Dec 2021Document25 pagesUS Army Aerial Delivery 1 Dec 2021João GusiNo ratings yet
- Interface Standard FOR Shipboard Systems: (Metric)Document10 pagesInterface Standard FOR Shipboard Systems: (Metric)Om Parkash SharmaNo ratings yet
- Us Coastguard DP RulesDocument11 pagesUs Coastguard DP RulesRoyNo ratings yet
- AnswersDocument9 pagesAnswersVictor Ose MosesNo ratings yet
- 04.introduction To Residential Rov - New Concept of Rov For Oil and Gas ActivitiesDocument14 pages04.introduction To Residential Rov - New Concept of Rov For Oil and Gas ActivitiesHerry SuhartomoNo ratings yet
- Sea Skimming Manual - V8.8Document11 pagesSea Skimming Manual - V8.8Gousalajam MohammadNo ratings yet
- Circular - 73 (EN)Document26 pagesCircular - 73 (EN)Саша ДолжанскийNo ratings yet
- Minimum Safe Manning Requirements For VesselsDocument31 pagesMinimum Safe Manning Requirements For VesselsRAMSINGH CHAUHANNo ratings yet
- Technical Specifications For Bird Flight DiverterDocument19 pagesTechnical Specifications For Bird Flight DiverterVidyavathiDavuluriNo ratings yet
- Testing of Standby Generators Without Class Attendance: Technical and Regulatory News No. 22/2019 - TechnicalDocument3 pagesTesting of Standby Generators Without Class Attendance: Technical and Regulatory News No. 22/2019 - TechnicalJCANo ratings yet
- Avionics Unit I NotesDocument9 pagesAvionics Unit I Notesayyapparishi biherNo ratings yet
- 20 22 00 MPDocument112 pages20 22 00 MPAdrian Lau100% (1)
- Workboats PSV VesselsDocument13 pagesWorkboats PSV VesselsAndreiAdwNo ratings yet
- MV-22B Osprey TestAndEvaluationDocument16 pagesMV-22B Osprey TestAndEvaluationmuhammad haidar razan hilmiNo ratings yet
- Improving Electric Powered Uavs' Endurance by Incorporating Battery Dumping ConceptDocument12 pagesImproving Electric Powered Uavs' Endurance by Incorporating Battery Dumping ConceptEsa Bagus Setyo NNo ratings yet
- SGN 112 - Navigation Safety - Carriage and Use of Radar Reflectors On Small VesselsDocument3 pagesSGN 112 - Navigation Safety - Carriage and Use of Radar Reflectors On Small VesselsRoman BabaevNo ratings yet
- MQ-8B Fire Scout: Vertical Takeoff and Landing Tactical Unmanned Aerial Vehicle SystemDocument2 pagesMQ-8B Fire Scout: Vertical Takeoff and Landing Tactical Unmanned Aerial Vehicle SystemC.JNo ratings yet
- REAV 28 Spec Sheet v3 02.02.23 2 2Document4 pagesREAV 28 Spec Sheet v3 02.02.23 2 2tebamo2166No ratings yet
- Section 10 - Safety InformationDocument8 pagesSection 10 - Safety Informationepeuss12No ratings yet
- All Vessels General RequirementsDocument10 pagesAll Vessels General RequirementsAamir Sirohi100% (2)
- MC 2018 03Document9 pagesMC 2018 03moisesfherdzNo ratings yet
- HF-4 Emergency Towing System (Including Instruction Book)Document43 pagesHF-4 Emergency Towing System (Including Instruction Book)MUKUL100% (1)
- AC 25-7 Change 1 PDFDocument28 pagesAC 25-7 Change 1 PDFAndrewNo ratings yet
- Chapter 2 - Aircraft Morphing An Industry Visi - 2018 - Morphing Wing TechnologiDocument17 pagesChapter 2 - Aircraft Morphing An Industry Visi - 2018 - Morphing Wing TechnologiRichardNo ratings yet
- Design of Well CompletionDocument10 pagesDesign of Well Completionscorpionking888No ratings yet
- Shuttle GustavsenDocument41 pagesShuttle GustavsenXa MauNo ratings yet
- An Inexpensive Terrain Awareness and Warning System For PilotsDocument23 pagesAn Inexpensive Terrain Awareness and Warning System For PilotsLeiser HartbeckNo ratings yet
- Design Mooring System Floating Offshore Wind Turbine FoundationDocument10 pagesDesign Mooring System Floating Offshore Wind Turbine FoundationpradewoNo ratings yet
- Dynamic Positioning (DP) : Operation Planning and WatchkeepingDocument3 pagesDynamic Positioning (DP) : Operation Planning and WatchkeepingosafinhoNo ratings yet
- Pilot Boat Section 4Document3 pagesPilot Boat Section 4Aamir SirohiNo ratings yet
- EPWADocument20 pagesEPWADawid ZborowskiNo ratings yet
- Annex To ED Decision 2013-015-RDocument18 pagesAnnex To ED Decision 2013-015-RBurse LeeNo ratings yet
- An Overview of DP OperationDocument7 pagesAn Overview of DP OperationAquiles SaburoNo ratings yet
- Copie A Fișierului Kopia Raport 1Document10 pagesCopie A Fișierului Kopia Raport 1Alexandra CiucanuNo ratings yet
- Waskito 2020 IOP Conf. Ser. Earth Environ. Sci. 557 012069Document12 pagesWaskito 2020 IOP Conf. Ser. Earth Environ. Sci. 557 012069Kwan Hang TongNo ratings yet
- Performance Verification FendersDocument13 pagesPerformance Verification FendersIbnu SenaNo ratings yet
- Pilatus Aircraft LTD - PC-12 Spectre PDFDocument2 pagesPilatus Aircraft LTD - PC-12 Spectre PDFsoma0357No ratings yet
- PID Marine Engine Speed Regulation Under Full Load Conditions For Sensitivity H Norm Specifications Against Propeller DisturbanceDocument10 pagesPID Marine Engine Speed Regulation Under Full Load Conditions For Sensitivity H Norm Specifications Against Propeller DisturbanceHa Di KhNo ratings yet
- AIR CRASH INVESTIGATIONS – THE CRASH OF VIRGIN GALACTIC SPACESHIP 2From EverandAIR CRASH INVESTIGATIONS – THE CRASH OF VIRGIN GALACTIC SPACESHIP 2No ratings yet
- Northrop N-63 Convoy Fighter: The Naval VTOL Turboprop Tailsitter Project of 1950From EverandNorthrop N-63 Convoy Fighter: The Naval VTOL Turboprop Tailsitter Project of 1950Rating: 5 out of 5 stars5/5 (2)
- Air Crash Investigations - The Crash Of Embraer 500 (N100EQ) Gaithersburg, MarylandFrom EverandAir Crash Investigations - The Crash Of Embraer 500 (N100EQ) Gaithersburg, MarylandNo ratings yet
- Fairplay-14-Datenblatt-1 - HTDocument1 pageFairplay-14-Datenblatt-1 - HTAbabNo ratings yet
- IMCAM261 DP Station Keeping Events Summary 2022 nj3zf0Document17 pagesIMCAM261 DP Station Keeping Events Summary 2022 nj3zf0AbabNo ratings yet
- Jacking SystemsDocument19 pagesJacking SystemsAbabNo ratings yet
- Part FVol 02Document160 pagesPart FVol 02AbabNo ratings yet
- Standard Detail X-BT - FCMDocument1 pageStandard Detail X-BT - FCMAbabNo ratings yet
- Incertezza Con D 85mm (P86 - T-15 - DP125)Document2 pagesIncertezza Con D 85mm (P86 - T-15 - DP125)AbabNo ratings yet
- FABIG TM79 ExplosionRiskAssessmentforanFPSOandDALSpecificationforNLFEA CAzzi RBrewertonDocument30 pagesFABIG TM79 ExplosionRiskAssessmentforanFPSOandDALSpecificationforNLFEA CAzzi RBrewertonAbabNo ratings yet
- Rosemount PT 3051SDocument5 pagesRosemount PT 3051SAbabNo ratings yet
- Grating FixingsDocument17 pagesGrating FixingsAbabNo ratings yet
- FABIG TM79 FactorsInfluencingtheExplosionDALandQuantificationoftheirImportance GNalvarteDocument21 pagesFABIG TM79 FactorsInfluencingtheExplosionDALandQuantificationoftheirImportance GNalvarteAbabNo ratings yet
- R109 - p9-11 - Barge Optimisation Leads To Cuts in Fuel ConsumptionDocument2 pagesR109 - p9-11 - Barge Optimisation Leads To Cuts in Fuel ConsumptionAbabNo ratings yet
- FABIG TM79 DesignExplosionLoadSpecificationforLargeFloatingFacilities LParisDocument17 pagesFABIG TM79 DesignExplosionLoadSpecificationforLargeFloatingFacilities LParisAbabNo ratings yet
- RRL For Presentation PDFDocument16 pagesRRL For Presentation PDFRodolfo CaputolNo ratings yet
- BRKCRS 2000Document73 pagesBRKCRS 2000PankajNo ratings yet
- Brain and Neural NetworkDocument10 pagesBrain and Neural NetworkKristyle BalagosaNo ratings yet
- Power Grid Corporation of India LTD.: CompanyDocument6 pagesPower Grid Corporation of India LTD.: CompanyBijuNo ratings yet
- North Carolina Agricultural and Technical State University, Greensboro, NCDocument2 pagesNorth Carolina Agricultural and Technical State University, Greensboro, NCGregory JoynerNo ratings yet
- Excel Ninja ShortcutsDocument20 pagesExcel Ninja ShortcutsAlvi MirzaNo ratings yet
- B - Com - Hons Batch 2018 (15-06-2020)Document55 pagesB - Com - Hons Batch 2018 (15-06-2020)sunandasharma8886456No ratings yet
- 2019 Winter Model Answer Paper (Msbte Study Resources) 2022-06-01T191325.048Document19 pages2019 Winter Model Answer Paper (Msbte Study Resources) 2022-06-01T191325.048EE5IRS Roll.34 Prem gaheraoNo ratings yet
- United States v. Adonte Young, 4th Cir. (2015)Document5 pagesUnited States v. Adonte Young, 4th Cir. (2015)Scribd Government DocsNo ratings yet
- Should & Shouldn T HaveDocument1 pageShould & Shouldn T Havebroken heartedNo ratings yet
- Boxer Rebellion PowerpointDocument15 pagesBoxer Rebellion PowerpointandreaasencioNo ratings yet
- English in Focus Assignment 3 Name: Farida Finalisti Puji Arfayan NimDocument1 pageEnglish in Focus Assignment 3 Name: Farida Finalisti Puji Arfayan NimninsiNo ratings yet
- Revised Aug 14 - Retainer Agreement - DR JuanezaDocument7 pagesRevised Aug 14 - Retainer Agreement - DR JuanezaAlice M. GarinNo ratings yet
- Vehicle Dynamics Lecture 1Document9 pagesVehicle Dynamics Lecture 1andi suntoroNo ratings yet
- Dse 2012 History Paper 1Document7 pagesDse 2012 History Paper 1CHEW JANICENo ratings yet
- Introduction To Sociolinguistics: Chapter One: Overview: What Is Sociolinguistics? What Do Sociolinguists Study?Document18 pagesIntroduction To Sociolinguistics: Chapter One: Overview: What Is Sociolinguistics? What Do Sociolinguists Study?ANDI ASRIFAN100% (1)
- School of Health and Allied Health Sciences Nursing Department Self-Directed Learning 5 (Clinical Area)Document3 pagesSchool of Health and Allied Health Sciences Nursing Department Self-Directed Learning 5 (Clinical Area)Juviely PremacioNo ratings yet
- Station Report: Usingen (Frankfurt)Document5 pagesStation Report: Usingen (Frankfurt)Alexander WieseNo ratings yet
- Joker, The Laughing Christ of Postmodernity (Arslan Akhtar)Document5 pagesJoker, The Laughing Christ of Postmodernity (Arslan Akhtar)Raja Arslan AkhtarNo ratings yet
- Daftar Stasiun Radio Di JakartaDocument1 pageDaftar Stasiun Radio Di Jakartadjarot2007No ratings yet
- The Future of Multimedia: Bridging To Virtual Worlds: Christopher DedeDocument1 pageThe Future of Multimedia: Bridging To Virtual Worlds: Christopher DedeRass SeyoumNo ratings yet
- FormsDocument6 pagesFormsSHIELA MARIE L. DIMACULANGANNo ratings yet
- MILG11Q1W3D4Document19 pagesMILG11Q1W3D4Eric AntonioNo ratings yet
- Excavations Tamil NaduDocument12 pagesExcavations Tamil NaduMohan RajNo ratings yet
- InnovationDocument20 pagesInnovationSayed EltaweelNo ratings yet
- Procurement Procedure in SSADocument94 pagesProcurement Procedure in SSAnilminaNo ratings yet


































































































Download as pdf or txt
You might also like
- Review (PDF) Statics and Strength of Materials 7th EditionDocument5 pagesReview (PDF) Statics and Strength of Materials 7th EditionNeci Cardeno0% (1)
- 737 Performance Reference Handbook - EASA EditionFrom Everand737 Performance Reference Handbook - EASA EditionRating: 4.5 out of 5 stars4.5/5 (3)
- r600 8 104Document247 pagesr600 8 104Mark Cheney100% (1)
- Airbus Revised Briefing InfoDocument9 pagesAirbus Revised Briefing InfoSrinath S. BhaumikNo ratings yet
- A.Nazarov - Small Patrol Boats - SelfRightingDocument9 pagesA.Nazarov - Small Patrol Boats - SelfRightingVladNo ratings yet
- 50037-ME-DOC-001 - Marine Spread Specifications and Certifications DossierDocument9 pages50037-ME-DOC-001 - Marine Spread Specifications and Certifications DossierseehariNo ratings yet
- Aon CoCubes - Manufacturing Case StudiesDocument10 pagesAon CoCubes - Manufacturing Case StudiesAnonymous z6HQR9VNo ratings yet
- Investigation Shows Officer Falsified ReportDocument7 pagesInvestigation Shows Officer Falsified ReportLas Vegas Review-Journal100% (1)
- DP Systems Chapter 5Document13 pagesDP Systems Chapter 5Lachin Kike100% (1)
- DP Operations Guidelines - SEACORDocument7 pagesDP Operations Guidelines - SEACORRoyNo ratings yet
- On DP Vessel ClassificationDocument20 pagesOn DP Vessel ClassificationDaniloNo ratings yet
- New Petrobras Concepts For WSOG (Well Specific Operating Guidelines)Document16 pagesNew Petrobras Concepts For WSOG (Well Specific Operating Guidelines)Xa MauNo ratings yet
- DP Event Bulletin 04 23Document14 pagesDP Event Bulletin 04 23Sorin VirlanNo ratings yet
- Redundant Propulsion: ShipsDocument8 pagesRedundant Propulsion: ShipsLyubomir LazarovNo ratings yet
- Thruster EffectivityDocument190 pagesThruster Effectivityronny-su100% (2)
- Dynamic PositioningDocument74 pagesDynamic PositioningMarc AlfredNo ratings yet
- VAVLINE-Vessel Intervention-IRM Method StatementDocument18 pagesVAVLINE-Vessel Intervention-IRM Method StatementlupiNo ratings yet
- Brochure o P CPP Propeller SystemsDocument8 pagesBrochure o P CPP Propeller SystemsalmondayNo ratings yet
- ASOG Owning and Managing Operational RiskDocument10 pagesASOG Owning and Managing Operational RiskAnatoliy Savelyev100% (1)
- Maintenance and LogisticDocument4 pagesMaintenance and LogisticKesma HimaspalNo ratings yet
- 02 EPA EP72 GL 0052 Underwater Services Equipment SpecificationDocument94 pages02 EPA EP72 GL 0052 Underwater Services Equipment Specificationvijuindia1111No ratings yet
- Annex EASA TCDS A.114 - (IM) - Beriev - BE 200ES E - (Restricted) Suspended PDFDocument72 pagesAnnex EASA TCDS A.114 - (IM) - Beriev - BE 200ES E - (Restricted) Suspended PDFSamNo ratings yet
- US Army Aerial Delivery 1 Dec 2021Document25 pagesUS Army Aerial Delivery 1 Dec 2021João GusiNo ratings yet
- Interface Standard FOR Shipboard Systems: (Metric)Document10 pagesInterface Standard FOR Shipboard Systems: (Metric)Om Parkash SharmaNo ratings yet
- Us Coastguard DP RulesDocument11 pagesUs Coastguard DP RulesRoyNo ratings yet
- AnswersDocument9 pagesAnswersVictor Ose MosesNo ratings yet
- 04.introduction To Residential Rov - New Concept of Rov For Oil and Gas ActivitiesDocument14 pages04.introduction To Residential Rov - New Concept of Rov For Oil and Gas ActivitiesHerry SuhartomoNo ratings yet
- Sea Skimming Manual - V8.8Document11 pagesSea Skimming Manual - V8.8Gousalajam MohammadNo ratings yet
- Circular - 73 (EN)Document26 pagesCircular - 73 (EN)Саша ДолжанскийNo ratings yet
- Minimum Safe Manning Requirements For VesselsDocument31 pagesMinimum Safe Manning Requirements For VesselsRAMSINGH CHAUHANNo ratings yet
- Technical Specifications For Bird Flight DiverterDocument19 pagesTechnical Specifications For Bird Flight DiverterVidyavathiDavuluriNo ratings yet
- Testing of Standby Generators Without Class Attendance: Technical and Regulatory News No. 22/2019 - TechnicalDocument3 pagesTesting of Standby Generators Without Class Attendance: Technical and Regulatory News No. 22/2019 - TechnicalJCANo ratings yet
- Avionics Unit I NotesDocument9 pagesAvionics Unit I Notesayyapparishi biherNo ratings yet
- 20 22 00 MPDocument112 pages20 22 00 MPAdrian Lau100% (1)
- Workboats PSV VesselsDocument13 pagesWorkboats PSV VesselsAndreiAdwNo ratings yet
- MV-22B Osprey TestAndEvaluationDocument16 pagesMV-22B Osprey TestAndEvaluationmuhammad haidar razan hilmiNo ratings yet
- Improving Electric Powered Uavs' Endurance by Incorporating Battery Dumping ConceptDocument12 pagesImproving Electric Powered Uavs' Endurance by Incorporating Battery Dumping ConceptEsa Bagus Setyo NNo ratings yet
- SGN 112 - Navigation Safety - Carriage and Use of Radar Reflectors On Small VesselsDocument3 pagesSGN 112 - Navigation Safety - Carriage and Use of Radar Reflectors On Small VesselsRoman BabaevNo ratings yet
- MQ-8B Fire Scout: Vertical Takeoff and Landing Tactical Unmanned Aerial Vehicle SystemDocument2 pagesMQ-8B Fire Scout: Vertical Takeoff and Landing Tactical Unmanned Aerial Vehicle SystemC.JNo ratings yet
- REAV 28 Spec Sheet v3 02.02.23 2 2Document4 pagesREAV 28 Spec Sheet v3 02.02.23 2 2tebamo2166No ratings yet
- Section 10 - Safety InformationDocument8 pagesSection 10 - Safety Informationepeuss12No ratings yet
- All Vessels General RequirementsDocument10 pagesAll Vessels General RequirementsAamir Sirohi100% (2)
- MC 2018 03Document9 pagesMC 2018 03moisesfherdzNo ratings yet
- HF-4 Emergency Towing System (Including Instruction Book)Document43 pagesHF-4 Emergency Towing System (Including Instruction Book)MUKUL100% (1)
- AC 25-7 Change 1 PDFDocument28 pagesAC 25-7 Change 1 PDFAndrewNo ratings yet
- Chapter 2 - Aircraft Morphing An Industry Visi - 2018 - Morphing Wing TechnologiDocument17 pagesChapter 2 - Aircraft Morphing An Industry Visi - 2018 - Morphing Wing TechnologiRichardNo ratings yet
- Design of Well CompletionDocument10 pagesDesign of Well Completionscorpionking888No ratings yet
- Shuttle GustavsenDocument41 pagesShuttle GustavsenXa MauNo ratings yet
- An Inexpensive Terrain Awareness and Warning System For PilotsDocument23 pagesAn Inexpensive Terrain Awareness and Warning System For PilotsLeiser HartbeckNo ratings yet
- Design Mooring System Floating Offshore Wind Turbine FoundationDocument10 pagesDesign Mooring System Floating Offshore Wind Turbine FoundationpradewoNo ratings yet
- Dynamic Positioning (DP) : Operation Planning and WatchkeepingDocument3 pagesDynamic Positioning (DP) : Operation Planning and WatchkeepingosafinhoNo ratings yet
- Pilot Boat Section 4Document3 pagesPilot Boat Section 4Aamir SirohiNo ratings yet
- EPWADocument20 pagesEPWADawid ZborowskiNo ratings yet
- Annex To ED Decision 2013-015-RDocument18 pagesAnnex To ED Decision 2013-015-RBurse LeeNo ratings yet
- An Overview of DP OperationDocument7 pagesAn Overview of DP OperationAquiles SaburoNo ratings yet
- Copie A Fișierului Kopia Raport 1Document10 pagesCopie A Fișierului Kopia Raport 1Alexandra CiucanuNo ratings yet
- Waskito 2020 IOP Conf. Ser. Earth Environ. Sci. 557 012069Document12 pagesWaskito 2020 IOP Conf. Ser. Earth Environ. Sci. 557 012069Kwan Hang TongNo ratings yet
- Performance Verification FendersDocument13 pagesPerformance Verification FendersIbnu SenaNo ratings yet
- Pilatus Aircraft LTD - PC-12 Spectre PDFDocument2 pagesPilatus Aircraft LTD - PC-12 Spectre PDFsoma0357No ratings yet
- PID Marine Engine Speed Regulation Under Full Load Conditions For Sensitivity H Norm Specifications Against Propeller DisturbanceDocument10 pagesPID Marine Engine Speed Regulation Under Full Load Conditions For Sensitivity H Norm Specifications Against Propeller DisturbanceHa Di KhNo ratings yet
- AIR CRASH INVESTIGATIONS – THE CRASH OF VIRGIN GALACTIC SPACESHIP 2From EverandAIR CRASH INVESTIGATIONS – THE CRASH OF VIRGIN GALACTIC SPACESHIP 2No ratings yet
- Northrop N-63 Convoy Fighter: The Naval VTOL Turboprop Tailsitter Project of 1950From EverandNorthrop N-63 Convoy Fighter: The Naval VTOL Turboprop Tailsitter Project of 1950Rating: 5 out of 5 stars5/5 (2)
- Air Crash Investigations - The Crash Of Embraer 500 (N100EQ) Gaithersburg, MarylandFrom EverandAir Crash Investigations - The Crash Of Embraer 500 (N100EQ) Gaithersburg, MarylandNo ratings yet
- Fairplay-14-Datenblatt-1 - HTDocument1 pageFairplay-14-Datenblatt-1 - HTAbabNo ratings yet
- IMCAM261 DP Station Keeping Events Summary 2022 nj3zf0Document17 pagesIMCAM261 DP Station Keeping Events Summary 2022 nj3zf0AbabNo ratings yet
- Jacking SystemsDocument19 pagesJacking SystemsAbabNo ratings yet
- Part FVol 02Document160 pagesPart FVol 02AbabNo ratings yet
- Standard Detail X-BT - FCMDocument1 pageStandard Detail X-BT - FCMAbabNo ratings yet
- Incertezza Con D 85mm (P86 - T-15 - DP125)Document2 pagesIncertezza Con D 85mm (P86 - T-15 - DP125)AbabNo ratings yet
- FABIG TM79 ExplosionRiskAssessmentforanFPSOandDALSpecificationforNLFEA CAzzi RBrewertonDocument30 pagesFABIG TM79 ExplosionRiskAssessmentforanFPSOandDALSpecificationforNLFEA CAzzi RBrewertonAbabNo ratings yet
- Rosemount PT 3051SDocument5 pagesRosemount PT 3051SAbabNo ratings yet
- Grating FixingsDocument17 pagesGrating FixingsAbabNo ratings yet
- FABIG TM79 FactorsInfluencingtheExplosionDALandQuantificationoftheirImportance GNalvarteDocument21 pagesFABIG TM79 FactorsInfluencingtheExplosionDALandQuantificationoftheirImportance GNalvarteAbabNo ratings yet
- R109 - p9-11 - Barge Optimisation Leads To Cuts in Fuel ConsumptionDocument2 pagesR109 - p9-11 - Barge Optimisation Leads To Cuts in Fuel ConsumptionAbabNo ratings yet
- FABIG TM79 DesignExplosionLoadSpecificationforLargeFloatingFacilities LParisDocument17 pagesFABIG TM79 DesignExplosionLoadSpecificationforLargeFloatingFacilities LParisAbabNo ratings yet
- RRL For Presentation PDFDocument16 pagesRRL For Presentation PDFRodolfo CaputolNo ratings yet
- BRKCRS 2000Document73 pagesBRKCRS 2000PankajNo ratings yet
- Brain and Neural NetworkDocument10 pagesBrain and Neural NetworkKristyle BalagosaNo ratings yet
- Power Grid Corporation of India LTD.: CompanyDocument6 pagesPower Grid Corporation of India LTD.: CompanyBijuNo ratings yet
- North Carolina Agricultural and Technical State University, Greensboro, NCDocument2 pagesNorth Carolina Agricultural and Technical State University, Greensboro, NCGregory JoynerNo ratings yet
- Excel Ninja ShortcutsDocument20 pagesExcel Ninja ShortcutsAlvi MirzaNo ratings yet
- B - Com - Hons Batch 2018 (15-06-2020)Document55 pagesB - Com - Hons Batch 2018 (15-06-2020)sunandasharma8886456No ratings yet
- 2019 Winter Model Answer Paper (Msbte Study Resources) 2022-06-01T191325.048Document19 pages2019 Winter Model Answer Paper (Msbte Study Resources) 2022-06-01T191325.048EE5IRS Roll.34 Prem gaheraoNo ratings yet
- United States v. Adonte Young, 4th Cir. (2015)Document5 pagesUnited States v. Adonte Young, 4th Cir. (2015)Scribd Government DocsNo ratings yet
- Should & Shouldn T HaveDocument1 pageShould & Shouldn T Havebroken heartedNo ratings yet
- Boxer Rebellion PowerpointDocument15 pagesBoxer Rebellion PowerpointandreaasencioNo ratings yet
- English in Focus Assignment 3 Name: Farida Finalisti Puji Arfayan NimDocument1 pageEnglish in Focus Assignment 3 Name: Farida Finalisti Puji Arfayan NimninsiNo ratings yet
- Revised Aug 14 - Retainer Agreement - DR JuanezaDocument7 pagesRevised Aug 14 - Retainer Agreement - DR JuanezaAlice M. GarinNo ratings yet
- Vehicle Dynamics Lecture 1Document9 pagesVehicle Dynamics Lecture 1andi suntoroNo ratings yet
- Dse 2012 History Paper 1Document7 pagesDse 2012 History Paper 1CHEW JANICENo ratings yet
- Introduction To Sociolinguistics: Chapter One: Overview: What Is Sociolinguistics? What Do Sociolinguists Study?Document18 pagesIntroduction To Sociolinguistics: Chapter One: Overview: What Is Sociolinguistics? What Do Sociolinguists Study?ANDI ASRIFAN100% (1)
- School of Health and Allied Health Sciences Nursing Department Self-Directed Learning 5 (Clinical Area)Document3 pagesSchool of Health and Allied Health Sciences Nursing Department Self-Directed Learning 5 (Clinical Area)Juviely PremacioNo ratings yet
- Station Report: Usingen (Frankfurt)Document5 pagesStation Report: Usingen (Frankfurt)Alexander WieseNo ratings yet
- Joker, The Laughing Christ of Postmodernity (Arslan Akhtar)Document5 pagesJoker, The Laughing Christ of Postmodernity (Arslan Akhtar)Raja Arslan AkhtarNo ratings yet
- Daftar Stasiun Radio Di JakartaDocument1 pageDaftar Stasiun Radio Di Jakartadjarot2007No ratings yet
- The Future of Multimedia: Bridging To Virtual Worlds: Christopher DedeDocument1 pageThe Future of Multimedia: Bridging To Virtual Worlds: Christopher DedeRass SeyoumNo ratings yet
- FormsDocument6 pagesFormsSHIELA MARIE L. DIMACULANGANNo ratings yet
- MILG11Q1W3D4Document19 pagesMILG11Q1W3D4Eric AntonioNo ratings yet
- Excavations Tamil NaduDocument12 pagesExcavations Tamil NaduMohan RajNo ratings yet
- InnovationDocument20 pagesInnovationSayed EltaweelNo ratings yet
- Procurement Procedure in SSADocument94 pagesProcurement Procedure in SSAnilminaNo ratings yet