Download as docx, pdf, or txt
You might also like
- Load Frequency ControlDocument4 pagesLoad Frequency Controlkumarchaturvedula100% (1)
- Futtsu Thermal Power StationDocument18 pagesFuttsu Thermal Power StationJOVAN HILMANSYAHNo ratings yet
- Power System Stability StudiesDocument63 pagesPower System Stability StudiesRitwik Anand0% (1)
- Ad6635f33710af6 EkDocument5 pagesAd6635f33710af6 EkVerruumm AmineNo ratings yet
- Modeling and Experimental Validation of A First Order Plant Model: DC Servo MotorDocument17 pagesModeling and Experimental Validation of A First Order Plant Model: DC Servo Motormeghraj01No ratings yet
- Synchronous MachineDocument51 pagesSynchronous MachineahmmsayemNo ratings yet
- ProjectControl, DC. AnalysisDocument15 pagesProjectControl, DC. AnalysisFir Dauss100% (1)
- APznzaZv YDIffTO4n4O AOwn AvRtnudzBl0remzAumPE9jRsmywQlsaYGS49ODmr8 KgaT1XsShBOB BilLGkWkoZtCjCt2 V5ry9nbm6 BUfcCuhaPFsi1y6nDocument3 pagesAPznzaZv YDIffTO4n4O AOwn AvRtnudzBl0remzAumPE9jRsmywQlsaYGS49ODmr8 KgaT1XsShBOB BilLGkWkoZtCjCt2 V5ry9nbm6 BUfcCuhaPFsi1y6nDaniel Lopes Dias SilvaNo ratings yet
- Modelling File Edited AnuragDocument53 pagesModelling File Edited AnuragHARENDRA BHINCHARNo ratings yet
- Turbine Governor ModelingDocument28 pagesTurbine Governor ModelingGuruxyz100% (1)
- Zlatka Tecec Kvalifikacijki Ispit Rad EngDocument6 pagesZlatka Tecec Kvalifikacijki Ispit Rad EngkurabyqldNo ratings yet
- Lab Exercise Control of Electric Machines : Student: Stošić Dino Index Number: 0069051394Document13 pagesLab Exercise Control of Electric Machines : Student: Stošić Dino Index Number: 0069051394Hakuna MatataNo ratings yet
- Tuning A PID Controller For A Digital Excitation Control SystemDocument8 pagesTuning A PID Controller For A Digital Excitation Control SystemSharat Chandra KeswarNo ratings yet
- (P1) Modul DC Motor Speed Control SystemDocument13 pages(P1) Modul DC Motor Speed Control SystemTito Bambang Priambodo - 6726No ratings yet
- Study of Generator Mode On Permanent Magnet Synchronous Motor (PMSM) For Application On Elevator Energy Regenerative Unit (EERU)Document8 pagesStudy of Generator Mode On Permanent Magnet Synchronous Motor (PMSM) For Application On Elevator Energy Regenerative Unit (EERU)Bouchendouka LiliaNo ratings yet
- Pi Control System Based Speed Control of DC Motor Using MicrocontrollerDocument13 pagesPi Control System Based Speed Control of DC Motor Using MicrocontrollerAnkit BhardwajNo ratings yet
- Lab 5Document4 pagesLab 5Akay HanafiahNo ratings yet
- Me2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDocument9 pagesMe2142-2 Speed/Position Control of A DC Motor: Department of Mechanical Engineering National University of SingaporeDeepak RainaNo ratings yet
- DESIGNING THE PROPORTIONAL (P) AND PROPORTIONAL-INTEGRAL (PI) CONTROLLERS Control SystemDocument7 pagesDESIGNING THE PROPORTIONAL (P) AND PROPORTIONAL-INTEGRAL (PI) CONTROLLERS Control SystemjayxcellNo ratings yet
- PID Controller For A Two Quadrant Chopper Fed DC Motor DriveDocument5 pagesPID Controller For A Two Quadrant Chopper Fed DC Motor DriveSalman HabibNo ratings yet
- 1792Document7 pages1792Mohd AliNo ratings yet
- Assignment PSEDocument5 pagesAssignment PSEdipakk beraNo ratings yet
- EXp2 SC19B158Document5 pagesEXp2 SC19B158Abeer KhatriNo ratings yet
- Lab ProjectDocument4 pagesLab ProjectdevakisvaniNo ratings yet
- Transient Stability Analysis Using MiPowerDocument5 pagesTransient Stability Analysis Using MiPowerBhavik Prajapati100% (1)
- AzimuthDocument14 pagesAzimuthMohd Shafiq AzniNo ratings yet
- Steploading GensetDocument12 pagesSteploading GensetariefNo ratings yet
- Techteach - No Simview DC Motor IndexDocument3 pagesTechteach - No Simview DC Motor IndexDiabloNo ratings yet
- Design of A PFC Rectifier With Fast Start Up Response and Low Input Current DistortionDocument5 pagesDesign of A PFC Rectifier With Fast Start Up Response and Low Input Current DistortionAndrei LeleaNo ratings yet
- Merged DocumentDocument25 pagesMerged DocumentAshokAbiNo ratings yet
- Power System Stability: Khai Chiat THAM (40131843)Document109 pagesPower System Stability: Khai Chiat THAM (40131843)vj4249No ratings yet
- 2011 NotesDocument58 pages2011 Notesmokorieboy100% (1)
- Semester I Examinations - 2011/2012Document7 pagesSemester I Examinations - 2011/2012Ismail HussainNo ratings yet
- EE321 LAb6Document18 pagesEE321 LAb6Brown Tukalou100% (1)
- Design and Simulation of Transformer Less Single Phase Photovoltaic Inverter Without Battery For Domestic ApplicationDocument6 pagesDesign and Simulation of Transformer Less Single Phase Photovoltaic Inverter Without Battery For Domestic ApplicationInternational Organization of Scientific Research (IOSR)No ratings yet
- Experiment 2: Weerasinghe D.A.P 201939070011 E.E.ADocument10 pagesExperiment 2: Weerasinghe D.A.P 201939070011 E.E.AkamalNo ratings yet
- Compressor Types, ClassificationDocument12 pagesCompressor Types, ClassificationNagaraj SubbiahNo ratings yet
- Print PDFDocument15 pagesPrint PDFSachin AngadiNo ratings yet
- Simulation of Genset LoadingDocument12 pagesSimulation of Genset LoadingariefNo ratings yet
- Fixed Pitch Wind Turbine Emulator Using A DC Motor and A Series ResistorDocument9 pagesFixed Pitch Wind Turbine Emulator Using A DC Motor and A Series ResistorMuthu Kumar SubramanianNo ratings yet
- 07A70203 POWERSYSTEMOPERATIONANDCONTROLfrDocument8 pages07A70203 POWERSYSTEMOPERATIONANDCONTROLfrJaipaul CheernamNo ratings yet
- Performance of A 4-Switch, 3-Phase Inverter Fed Induction Motor (IM) Drive System Using MATLABDocument3 pagesPerformance of A 4-Switch, 3-Phase Inverter Fed Induction Motor (IM) Drive System Using MATLABInternational Journal of Engineering and TechniquesNo ratings yet
- Research To Study Variable Frequency Drive and Its Energy SavingsDocument4 pagesResearch To Study Variable Frequency Drive and Its Energy SavingsIjsrnet EditorialNo ratings yet
- Emc301 As2019 BDocument4 pagesEmc301 As2019 Bdawa penjorNo ratings yet
- PFC Using Buck Converter in Single Phase AC-DC CircuitsDocument51 pagesPFC Using Buck Converter in Single Phase AC-DC CircuitsSathya NarayananNo ratings yet
- Energy Efficient Control of Three-Phase Induction Motor DriveDocument6 pagesEnergy Efficient Control of Three-Phase Induction Motor DrivenaserhashemniaNo ratings yet
- Modelling and Simulation of Microturbine Generation System PDFDocument7 pagesModelling and Simulation of Microturbine Generation System PDFsaraswatthiNo ratings yet
- Part 1: DC Drive System: ECE327/GECE527 Final Project Spring 2016Document1 pagePart 1: DC Drive System: ECE327/GECE527 Final Project Spring 2016shahNo ratings yet
- Transient Stability of A Multi Machine Power System: Devender Kumar, Balwinder Singh SurjanDocument4 pagesTransient Stability of A Multi Machine Power System: Devender Kumar, Balwinder Singh SurjanVerruumm AmineNo ratings yet
- Simulation and Analysis of Matrix Converter: A DissertationDocument79 pagesSimulation and Analysis of Matrix Converter: A DissertationAnu AthiraNo ratings yet
- UIU EC-II Lecture#9Document18 pagesUIU EC-II Lecture#9Montosh RoyNo ratings yet
- Tutorial Problems EU-IIDocument3 pagesTutorial Problems EU-IIPaul Praneeth MuddamalleNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesFrom EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesNo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Physics 916Document19 pagesPhysics 916Nabeel AhammedNo ratings yet
- Siemens LZX-MT28800Document4 pagesSiemens LZX-MT28800ulissesbmNo ratings yet
- Adtech 2 Course OutlineDocument1 pageAdtech 2 Course OutlineEarn8348No ratings yet
- Testing Procedures For Preventive Maintenance of Electrical EquipmentDocument100 pagesTesting Procedures For Preventive Maintenance of Electrical EquipmentReynante T. BitasNo ratings yet
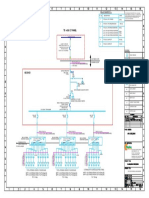
- 604.5kW - John Deere - Dewas - SLD - R1-RCC ROOF-LT SLD PDFDocument1 page604.5kW - John Deere - Dewas - SLD - R1-RCC ROOF-LT SLD PDFaks2205No ratings yet
- SJPO Special Round 2011 Sample PDFDocument10 pagesSJPO Special Round 2011 Sample PDFziwei_from_chinaNo ratings yet
- Phys Int CC CH 2 - Motion in A Straight Line - AnswersDocument10 pagesPhys Int CC CH 2 - Motion in A Straight Line - AnswersKimberly OlivaresNo ratings yet
- VMC - SOSE JEE MAINS - 4 (Question Paper)Document14 pagesVMC - SOSE JEE MAINS - 4 (Question Paper)Gunjan SinghNo ratings yet
- Model 570 Pressure TransmitterDocument4 pagesModel 570 Pressure TransmitterToan KeNo ratings yet
- Chapter 1 - Physical Quantities, Units and MeasurementsDocument61 pagesChapter 1 - Physical Quantities, Units and MeasurementsEthan ChuangNo ratings yet
- 4Document6 pages4robinston jeyasinghNo ratings yet
- Unit - I D.C. GeneratorsDocument78 pagesUnit - I D.C. GeneratorsCH MOHAMMAD ATTIR KHAYYAMNo ratings yet
- Moment of InertiaDocument3 pagesMoment of Inertiakarnati saidireddyNo ratings yet
- Device MaterialsDocument9 pagesDevice Materialstejas chikhlikarNo ratings yet
- Resonance Hyper PhysicsDocument3 pagesResonance Hyper Physicsmech.sasikumarNo ratings yet
- Mitsubishi Power, Ltd. - Power Plants: Gas Turbine Combined Cycle (GTCC) Power PlantsDocument2 pagesMitsubishi Power, Ltd. - Power Plants: Gas Turbine Combined Cycle (GTCC) Power PlantsKR PANo ratings yet
- MPPT AlgorithmDocument7 pagesMPPT AlgorithmVishnu Kumar NadarNo ratings yet
- S.L. Dixon and Cesare Hall (Auth.) - Fluid Mechanics and Thermodynamics of Turbomachinery-Butterworth-HeinDocument3 pagesS.L. Dixon and Cesare Hall (Auth.) - Fluid Mechanics and Thermodynamics of Turbomachinery-Butterworth-Heinsamarsinghai26No ratings yet
- Chapter 14: Kinematics of A Particle - Work and EnergyDocument91 pagesChapter 14: Kinematics of A Particle - Work and EnergysritaranNo ratings yet
- Linear Technology Magazine Circuit Collection1 PDFDocument16 pagesLinear Technology Magazine Circuit Collection1 PDFArun GuptaNo ratings yet
- 33 KV Pin InsulatorDocument4 pages33 KV Pin InsulatorganeshakceNo ratings yet
- EN - 01 GeneralDocument57 pagesEN - 01 GeneralMarco VegaNo ratings yet
- SB150 User's Manual B.1Document77 pagesSB150 User's Manual B.1Eka PratamaNo ratings yet
- Types of Relays: Protection-Relays-Or-Protective-RelaysDocument2 pagesTypes of Relays: Protection-Relays-Or-Protective-Relayspoonam yadavNo ratings yet
- Grid Impact of Electric Vehicle Fast Charging Stations Trends Standards Issues and Mitigation Measures An Overview AcceptedDocument20 pagesGrid Impact of Electric Vehicle Fast Charging Stations Trends Standards Issues and Mitigation Measures An Overview AcceptedcimermanNo ratings yet
- High Voltage DC Transmission: Presented byDocument75 pagesHigh Voltage DC Transmission: Presented bySahnavaz Saiyyed100% (1)
- Grid Connected PVDocument16 pagesGrid Connected PVLEON SOTNASNo ratings yet
- DC Machines: Version 2 EE IIT, KharagpurDocument16 pagesDC Machines: Version 2 EE IIT, KharagpurkallathemmadiNo ratings yet
- D.E 6rd EditionDocument33 pagesD.E 6rd EditionkenNo ratings yet