Download as pdf or txt
You might also like
- Trouble Shooting SCC Line EN PDFDocument56 pagesTrouble Shooting SCC Line EN PDFLeonardo80% (5)
- SW 10 16 Ta Ma EnglDocument64 pagesSW 10 16 Ta Ma Englpricopdaniel100% (2)
- ZF 3 WG 94 PDFDocument106 pagesZF 3 WG 94 PDFpricopdaniel100% (4)
- Hydraulikanlage Schmidt Mit PS 5 Ausgabe 18 - ENDocument81 pagesHydraulikanlage Schmidt Mit PS 5 Ausgabe 18 - ENpricopdaniel100% (1)
- Fuji Starting Guide G11S-LE2 - Lift - 7Document54 pagesFuji Starting Guide G11S-LE2 - Lift - 7Nguyen Anh Tu100% (3)
- Trailer ABS: 000 700 022/01.99./redditchDocument20 pagesTrailer ABS: 000 700 022/01.99./redditchpricopdanielNo ratings yet
- Liebherr LTM 1040-2.1 Mobile Crane - 40t - InformationDocument16 pagesLiebherr LTM 1040-2.1 Mobile Crane - 40t - InformationCallumWoodward50% (2)
- Modulo de Controle Eletronico PDFDocument3 pagesModulo de Controle Eletronico PDFTom Souza100% (1)
- 6 Electronic Control Module (Machine) PDFDocument6 pages6 Electronic Control Module (Machine) PDFwesley candidoNo ratings yet
- Pines EcuDocument7 pagesPines EcuWladimir AmaguañaNo ratings yet
- TM Control ModuleDocument18 pagesTM Control Modulesolikhinnasi2No ratings yet
- Electronic Control Module - TransmissionDocument9 pagesElectronic Control Module - TransmissionFranciane Pires100% (1)
- Implement ECM: Electronic Control (Brake System) (M0111643) 2020/12/09Document23 pagesImplement ECM: Electronic Control (Brake System) (M0111643) 2020/12/09Rio AkbrNo ratings yet
- Electronic Control Module (ECM) : Shutdown SIS Previous ScreenDocument5 pagesElectronic Control Module (ECM) : Shutdown SIS Previous ScreenWladimir AmaguañaNo ratings yet
- Systems Operation ECM 740Document6 pagesSystems Operation ECM 740AwanNo ratings yet
- Electronic Control Module: Systems OperationDocument6 pagesElectronic Control Module: Systems Operationanak haruanNo ratings yet
- Electronic Control (Machine System) : Systems OperationDocument25 pagesElectronic Control (Machine System) : Systems OperationMbahdiro KolenxNo ratings yet
- Electronic Control Module (Power Train) : Arrêter SIS Ecran PrécédentDocument4 pagesElectronic Control Module (Power Train) : Arrêter SIS Ecran Précédentamskroud brahimNo ratings yet
- Electronic Control ModuleDocument7 pagesElectronic Control ModuleBroCactusNo ratings yet
- Búsqueda Del Medio - UENR3858 - 320D2 and 323D2 ExcavatorsDocument8 pagesBúsqueda Del Medio - UENR3858 - 320D2 and 323D2 ExcavatorsErlen PolancoNo ratings yet
- Electronic Control Module (Power Train) : Operación de SistemasDocument4 pagesElectronic Control Module (Power Train) : Operación de Sistemasgalvis1020100% (3)
- Electronic Control Module (Power Train)Document8 pagesElectronic Control Module (Power Train)Iginio Malaver VargasNo ratings yet
- Electronic Control Module 326DDocument4 pagesElectronic Control Module 326DBaron KasoziNo ratings yet
- Engine and Hydraulic Pump ControllerDocument5 pagesEngine and Hydraulic Pump ControllerDaniel TekleNo ratings yet
- ECM 140HDocument4 pagesECM 140HmdqNo ratings yet
- 09.1 PLC - Technical HandbookDocument30 pages09.1 PLC - Technical HandbookSandoval Ramos Eddy100% (1)
- 2008 Hyundai Santa Fe GLS 2008 Hyundai Santa Fe GLS: Powertrain Control Module (PCM)Document12 pages2008 Hyundai Santa Fe GLS 2008 Hyundai Santa Fe GLS: Powertrain Control Module (PCM)Manolo RodriguezNo ratings yet
- PC210LC-11 Sen06695-01 Control SystemDocument37 pagesPC210LC-11 Sen06695-01 Control Systemdatphuong100% (1)
- Points InternationauxDocument4 pagesPoints Internationauxshnidher speedbirdNo ratings yet
- Caf Salidas ElectrónicasDocument6 pagesCaf Salidas ElectrónicasMiguel Angel Garrido CardenasNo ratings yet
- Pin Out BMW 318i (E36)Document10 pagesPin Out BMW 318i (E36)Miguelito TapiaNo ratings yet
- 140H DAWI Systems OperationDocument18 pages140H DAWI Systems OperationDaniel TekleNo ratings yet
- Machine ECM Pinout CAT TH460Document6 pagesMachine ECM Pinout CAT TH460Daniel Aguirre100% (2)
- Electronic Control Module (Power Train) Inout OutputDocument7 pagesElectronic Control Module (Power Train) Inout OutputSayed Younis Sadaat100% (1)
- Engine and Hydraulic Pump Controller: Pantalla AnteriorDocument5 pagesEngine and Hydraulic Pump Controller: Pantalla AnteriorHamilton Miranda100% (3)
- 390F Main PumpDocument19 pages390F Main PumpPHÁT NGUYỄN THẾNo ratings yet
- Monitoring Codes of PC300 MachinesDocument7 pagesMonitoring Codes of PC300 Machinesbjrock123No ratings yet
- Transmission Control Unit T-ECU, Specifications: Service InformationDocument2 pagesTransmission Control Unit T-ECU, Specifications: Service InformationxuanNo ratings yet
- Connector Contact Description: TroubleshootingDocument11 pagesConnector Contact Description: Troubleshootinganak haruanNo ratings yet
- Hydraulic Servo SystemDocument33 pagesHydraulic Servo SystemNguyenCanhBaoNo ratings yet
- Electrical Graphic SymbolDocument5 pagesElectrical Graphic SymbolIslam ShoukryNo ratings yet
- Angle-Of-Attack System - Adjustment-TestDocument9 pagesAngle-Of-Attack System - Adjustment-TestEleazarNo ratings yet
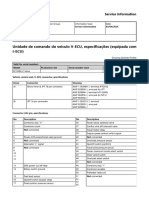
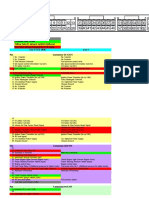
- Vehicle Control Unit V-ECU, Specifications: Service InformationDocument3 pagesVehicle Control Unit V-ECU, Specifications: Service InformationMorteza BaratzadehNo ratings yet
- CX User ManuelDocument26 pagesCX User ManuelSafi100% (3)
- Lab 7 PLC With Stepper MotorDocument3 pagesLab 7 PLC With Stepper Motorgedeus8072No ratings yet
- Pinout VECUDocument3 pagesPinout VECUcentraltechgvNo ratings yet
- EDC7UC31Document41 pagesEDC7UC31haviettuanNo ratings yet
- Autostart 700 (Model Numbers AS3/E ) : Engine/Generator Controller Installation Reference SheetDocument2 pagesAutostart 700 (Model Numbers AS3/E ) : Engine/Generator Controller Installation Reference SheetMH..2023No ratings yet
- Electrical Graphic SymbolDocument5 pagesElectrical Graphic SymbolIslam ShoukryNo ratings yet
- CX/ELF Series Lift Control System: User ManualDocument26 pagesCX/ELF Series Lift Control System: User ManualMohamed Saad100% (2)
- AA51880 - Servo Motor ControlDocument10 pagesAA51880 - Servo Motor ControlhugosaldanoNo ratings yet
- NISSAN Q02elDocument36 pagesNISSAN Q02elМаксым КовальськыйNo ratings yet
- Ecm IplementosDocument2 pagesEcm Iplementosjuan castaedaNo ratings yet
- Engine Control Module (Ecm) : Connector (E100 K)Document11 pagesEngine Control Module (Ecm) : Connector (E100 K)Ham NgoNo ratings yet
- Ecu 04 Manual enDocument4 pagesEcu 04 Manual enMahendra PersonnelNo ratings yet
- 614-20022-00 (3-6KW) SearchableDocument18 pages614-20022-00 (3-6KW) SearchableKhaled BellegdyNo ratings yet
- Switches and ControlsDocument20 pagesSwitches and ControlsLucho Volvo TronicNo ratings yet
- Evo 4 5 6 Conversion To Evo7 8 ECU Pinout DiagramsDocument10 pagesEvo 4 5 6 Conversion To Evo7 8 ECU Pinout DiagramsRemus TuningNo ratings yet
- Evo456 Conversion To Evo78 ECU Pinout DiagramsDocument10 pagesEvo456 Conversion To Evo78 ECU Pinout DiagramspapagunzNo ratings yet
- Engine Control Module (ECM) : Pin No. Description Connected ToDocument13 pagesEngine Control Module (ECM) : Pin No. Description Connected ToJeni100% (1)
- JKBLD750 ManualDocument15 pagesJKBLD750 Manualvicuaduoc1No ratings yet
- OLY Engine Interface ModuleDocument4 pagesOLY Engine Interface ModuleAlejandro Bonilla100% (2)
- C-9 Heui System Power SuppliesDocument14 pagesC-9 Heui System Power SuppliesJean-Jacques OuandaogoNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Alaska Eng 11.2019Document115 pagesAlaska Eng 11.2019pricopdanielNo ratings yet
- Haldex Brake Products LTDDocument30 pagesHaldex Brake Products LTDpricopdanielNo ratings yet
- Catalog 2011Document113 pagesCatalog 2011pricopdanielNo ratings yet
- Location ComponentDocument12 pagesLocation ComponentpricopdanielNo ratings yet
- 730a Motoconformadora PDFDocument262 pages730a Motoconformadora PDFHilton Herrera83% (6)
- 17 - BremsachseDocument2 pages17 - BremsachsepricopdanielNo ratings yet
- 7-1. Electrical SystemDocument110 pages7-1. Electrical SystempricopdanielNo ratings yet
- Culori Ral UtilajeDocument10 pagesCulori Ral UtilajepricopdanielNo ratings yet
- K1 12 AS Mid OD/TO: (Incr) (Incr) (Incr) (Incr)Document1 pageK1 12 AS Mid OD/TO: (Incr) (Incr) (Incr) (Incr)pricopdanielNo ratings yet
- en WHB Hatz W35 PDFDocument76 pagesen WHB Hatz W35 PDFpricopdaniel100% (3)
- ManDocument1 pageManpricopdanielNo ratings yet
- GHH PDFDocument14 pagesGHH PDFpricopdanielNo ratings yet
- BPW Service Instructions - KLD 08 2010 ECOPLUS IIDocument95 pagesBPW Service Instructions - KLD 08 2010 ECOPLUS IIpricopdaniel100% (1)
- GHH PDFDocument14 pagesGHH PDFpricopdanielNo ratings yet
- Wheel ExcavatorDocument32 pagesWheel Excavatorpricopdaniel100% (1)
- 1104d-E44ta sbl@96.5kw (Tpd1575e1)Document10 pages1104d-E44ta sbl@96.5kw (Tpd1575e1)pricopdaniel50% (2)
- InterfacesDocument13 pagesInterfacesnenadgorgiNo ratings yet
- Sistem Centralizat Gresare TWINDocument48 pagesSistem Centralizat Gresare TWINpricopdanielNo ratings yet
- Merc Fault CodesDocument24 pagesMerc Fault Codespricopdaniel0% (2)
- Stratos S MS222x Service Manual RevADocument79 pagesStratos S MS222x Service Manual RevApricopdanielNo ratings yet
- Na Eaton Tab GBDocument6 pagesNa Eaton Tab GBpricopdaniel100% (1)
- 115 Kv-34.5 KV Gis Substation MacanangDocument101 pages115 Kv-34.5 KV Gis Substation MacanangMark Ivan JagodillaNo ratings yet
- EEE 209 Presentation 3 (Circuits Cont)Document185 pagesEEE 209 Presentation 3 (Circuits Cont)Mert YılmazNo ratings yet
- The Design of A Modern Protection System For A Static Var CompensatorDocument7 pagesThe Design of A Modern Protection System For A Static Var CompensatorchetanNo ratings yet
- DC Power Monitor With INA209 and ArduinoDocument57 pagesDC Power Monitor With INA209 and Arduinojp2udhaya100% (2)
- NCERT Exemplar Solution Class 10 Science Chapter 12Document18 pagesNCERT Exemplar Solution Class 10 Science Chapter 12Priyanshu Bhardwaj100% (1)
- Xuk0Arctl2: Product Data SheetDocument2 pagesXuk0Arctl2: Product Data SheetPedro Andrés Muñoz orozcoNo ratings yet
- Protective Relaying - MITDocument130 pagesProtective Relaying - MITPrithibe Prithibe Prithibe88% (8)
- STD IX Chem ch-4 WorksheetDocument2 pagesSTD IX Chem ch-4 WorksheetRehan ZakariaNo ratings yet
- Sm2a-Drives-Line-Gb - 1819 Stea BardiDocument2 pagesSm2a-Drives-Line-Gb - 1819 Stea BardiAdy MihailaNo ratings yet
- Audio System, Multi-Display, Navigation System, Parking AssistDocument25 pagesAudio System, Multi-Display, Navigation System, Parking Assistdima65No ratings yet
- Sample of PASS M0S - SBB - Installation Manual - 2GJA700311 (E)Document40 pagesSample of PASS M0S - SBB - Installation Manual - 2GJA700311 (E)dwas1314100% (1)
- An Nexpensive Time-Domain Reflectometer: MarchDocument3 pagesAn Nexpensive Time-Domain Reflectometer: Marchfred osterNo ratings yet
- Microstrip Lowpass and Highpass Filter DesignDocument18 pagesMicrostrip Lowpass and Highpass Filter DesignGöksenin BozdağNo ratings yet
- UPower Hi Manual EN V2.6Document64 pagesUPower Hi Manual EN V2.6john marcosNo ratings yet
- Types of Conductor Splices and JointsDocument6 pagesTypes of Conductor Splices and Jointslj raquionNo ratings yet
- XHST-10AB Programmable Timer ControllerDocument12 pagesXHST-10AB Programmable Timer ControllerJie ChenNo ratings yet
- A159109546795 PDFDocument95 pagesA159109546795 PDFSuneetha AsNo ratings yet
- PC1432 T3 SolutionsDocument4 pagesPC1432 T3 SolutionsGenna NgNo ratings yet
- International Standard: Protection Against Electric Shock - Common Aspects For Installation and EquipmentDocument7 pagesInternational Standard: Protection Against Electric Shock - Common Aspects For Installation and EquipmentasimjkhanNo ratings yet
- Emi and Ac 2Document16 pagesEmi and Ac 2Debojit NandiNo ratings yet
- Product Data Sheet: Transformer - T40 - Sepam Series 40Document2 pagesProduct Data Sheet: Transformer - T40 - Sepam Series 40Achira DasanayakeNo ratings yet
- Fei Yuan-CMOS Active Inductors and Transformers - Principle, Implementation, and Applications-Springer (2008)Document298 pagesFei Yuan-CMOS Active Inductors and Transformers - Principle, Implementation, and Applications-Springer (2008)PromachNo ratings yet
- GSM Based Patient Health Monitoring SystemDocument16 pagesGSM Based Patient Health Monitoring SystemNazmeen BanuNo ratings yet
- Experiment 4: Max Max 2 oDocument3 pagesExperiment 4: Max Max 2 oSukhwinder Singh GillNo ratings yet
- 65nm CMOS Process Data SheetDocument1 page65nm CMOS Process Data SheetBlmjdb Abdelhafid0% (1)
- UL 83 Specifications (Diameter) 1Document2 pagesUL 83 Specifications (Diameter) 1abdullahswais100No ratings yet
- Datasheet RXTX SplitterDocument2 pagesDatasheet RXTX SplitterOsman ÇarhoğluNo ratings yet
- 1.electric Charges and Fields-TestDocument1 page1.electric Charges and Fields-TestArshdeep singhNo ratings yet
- Category 6A Utp Patch Cable, 24Awgx4P, PVC: Standard CompliancesDocument2 pagesCategory 6A Utp Patch Cable, 24Awgx4P, PVC: Standard CompliancesKurt RosenhagenNo ratings yet
- Consola YAMAHA EMX5016CFDocument6 pagesConsola YAMAHA EMX5016CFSamuel LópezNo ratings yet