Download as pdf or txt
You might also like
- The Engineering of RELIABLE Embedded Systems-2016 PDFDocument65 pagesThe Engineering of RELIABLE Embedded Systems-2016 PDFMariano OlivaresNo ratings yet
- Independent Assessment Framework: Customer Security ProgrammeDocument18 pagesIndependent Assessment Framework: Customer Security Programmemustafa jawadNo ratings yet
- 6282 - Machine Learning Project ReportDocument41 pages6282 - Machine Learning Project ReportSangeeta Rana0% (1)
- Control Engineering Compressed WatermarkDocument71 pagesControl Engineering Compressed WatermarkBasava RajNo ratings yet
- Assignment Understanding Servomechanism in Control TheoryDocument3 pagesAssignment Understanding Servomechanism in Control Theoryhadiakhalid.34No ratings yet
- Rev. in Auto Contol SystemDocument2 pagesRev. in Auto Contol SystemChristopher AsuncionNo ratings yet
- Control System EngineeringDocument95 pagesControl System EngineeringAbdulrahmanNo ratings yet
- Introduction To Control SystemsDocument3 pagesIntroduction To Control SystemsRahul SandilyaNo ratings yet
- Alvarez Johndave Bsece412 Ass#1Document4 pagesAlvarez Johndave Bsece412 Ass#1MelanieNo ratings yet
- Mechatronics Assignment - 1Document6 pagesMechatronics Assignment - 1SARTHAK JAINNo ratings yet
- Control Systems CH1Document12 pagesControl Systems CH1kkefeingeNo ratings yet
- Chapter#1: 1. Basic Concept of Control SystemDocument14 pagesChapter#1: 1. Basic Concept of Control SystemMerie Ann DudangNo ratings yet
- FALLSEM2023-24 BECE302L TH VL2023240100269 2023-04-24 Reference-Material-IDocument5 pagesFALLSEM2023-24 BECE302L TH VL2023240100269 2023-04-24 Reference-Material-IRupam KunduNo ratings yet
- Chapter OneDocument35 pagesChapter OneKirubel MulugetaNo ratings yet
- Chapter OneDocument28 pagesChapter OneSurafel TadesseNo ratings yet
- Topic 1. Introduction To Control Systems DesignDocument14 pagesTopic 1. Introduction To Control Systems DesignxREDCivicCometxNo ratings yet
- Control System Engineering - IDocument212 pagesControl System Engineering - IAjit Kumar Kisku100% (1)
- Control Systems Notes DEE M2 JuneDocument34 pagesControl Systems Notes DEE M2 JuneThairu MuiruriNo ratings yet
- Control System 1Document29 pagesControl System 1Gabriel GalizaNo ratings yet
- Feedback Control TheoryDocument16 pagesFeedback Control TheorykelvinNo ratings yet
- Control Systems Expanded IntroDocument3 pagesControl Systems Expanded IntroprimeforfivelegendsNo ratings yet
- ControlDocument279 pagesControlNandakishore PradeepNo ratings yet
- Introduction PDFDocument7 pagesIntroduction PDFSandeep B RNo ratings yet
- EE2253 - Control Systems PDFDocument124 pagesEE2253 - Control Systems PDFaduveyNo ratings yet
- What Is An Automatic Control SystemDocument9 pagesWhat Is An Automatic Control SystemFanni Surya AnggaraNo ratings yet
- Process Control SystemsDocument6 pagesProcess Control SystemsRae angelo AgonoyNo ratings yet
- Cslecture-1 Introduction To Control Systems PDFDocument14 pagesCslecture-1 Introduction To Control Systems PDF017 Shiv Sagar Kumar sinhaNo ratings yet
- Topic 5-Types of FeedbackDocument31 pagesTopic 5-Types of FeedbackBautista, Aljhon G.No ratings yet
- Instrumentation & Process ControlDocument6 pagesInstrumentation & Process ControlAnonymous 0zrCNQNo ratings yet
- 1-Analysis and Design Objectives and Open Loop and Closed Loop Control SystemDocument33 pages1-Analysis and Design Objectives and Open Loop and Closed Loop Control SystemAzhar AliNo ratings yet
- Experiment 12 Instrumentation and Control LabDocument17 pagesExperiment 12 Instrumentation and Control LabAyesha KhurramNo ratings yet
- Unit IDocument42 pagesUnit Irajavelan.mNo ratings yet
- Aerospace Control Systems 2020Document64 pagesAerospace Control Systems 2020Angeline ChasakaraNo ratings yet
- Prelims Report: Che-529 Process Dynamics and ControlDocument17 pagesPrelims Report: Che-529 Process Dynamics and ControlMariel ManiboNo ratings yet
- 1 Introduction To Control SystemsDocument17 pages1 Introduction To Control SystemsMuhammad Farhan100% (1)
- CertainlyDocument2 pagesCertainlyelsharifus18No ratings yet
- Chapter 1 Introduction W2015Document42 pagesChapter 1 Introduction W2015120200421003nNo ratings yet
- Control SystemsDocument12 pagesControl Systemsoyebowale.emmanuelNo ratings yet
- Introduction To Control SystemsDocument90 pagesIntroduction To Control SystemsNuwan HemanthaNo ratings yet
- Control Systems InformationDocument2 pagesControl Systems InformationprimeforfivelegendsNo ratings yet
- controlICS CH1Document5 pagescontrolICS CH1Magarsaa Qana'iiNo ratings yet
- Closed Loop ResponseDocument8 pagesClosed Loop ResponseJoydeep Choudhury 20UCH030No ratings yet
- Topic 1: Introduction To Control System and Mathematical ReviewDocument43 pagesTopic 1: Introduction To Control System and Mathematical ReviewFaez FeakryNo ratings yet
- 001 Feedback and CONTROL SYSTEMS - NotesDocument10 pages001 Feedback and CONTROL SYSTEMS - NotesJeremiahNo ratings yet
- What Can Be Said About The Controllability and Observability Conditions If The Transfer Function Has PoleDocument6 pagesWhat Can Be Said About The Controllability and Observability Conditions If The Transfer Function Has PoleMengistu BirukeNo ratings yet
- System Dynamics AND Control: Chapter 1 IntroductionDocument54 pagesSystem Dynamics AND Control: Chapter 1 Introductionali kartalNo ratings yet
- ASS Control EngiDocument2 pagesASS Control Engipogikian.pascoNo ratings yet
- Introduction To Control Engineering and System Modeling (1) : Majid Midhat SaeedDocument7 pagesIntroduction To Control Engineering and System Modeling (1) : Majid Midhat Saeedماجد مدحت سعيدNo ratings yet
- Report SeminarDocument23 pagesReport SeminarpradnyaekadNo ratings yet
- Module 5 - NotesDocument20 pagesModule 5 - Notesvinayakavini464No ratings yet
- Group 2 ReportDocument11 pagesGroup 2 ReportLouie CamposNo ratings yet
- Lecture Notes NewDocument76 pagesLecture Notes NewBethany LerewanuNo ratings yet
- Introduction To Feedback and Control SystemDocument6 pagesIntroduction To Feedback and Control SystemAdriano Mercedes Jr. CanoNo ratings yet
- Experiment No 9 IC LabDocument12 pagesExperiment No 9 IC LabAyesha KhurramNo ratings yet
- Feedback Intro NotesDocument4 pagesFeedback Intro NotesChoco MeowMeowNo ratings yet
- Funda 1Document134 pagesFunda 1johnpaul varonaNo ratings yet
- CH 1Document9 pagesCH 1hailegebreselassie24No ratings yet
- Essay / Assignment Title: System Engineering With A Focus On Business ProcessesDocument32 pagesEssay / Assignment Title: System Engineering With A Focus On Business ProcessesAmneet sistersNo ratings yet
- Process Control, Network Systems, and SCADADocument13 pagesProcess Control, Network Systems, and SCADASTNo ratings yet
- Control Systems Lecture-1 2018Document60 pagesControl Systems Lecture-1 2018Lloyd MunthaliNo ratings yet
- ECNG-3212 Lecture 01Document49 pagesECNG-3212 Lecture 01hiwot222712No ratings yet
- Three Financial Statements in Excel Step by Step With Business ProblemDocument22 pagesThree Financial Statements in Excel Step by Step With Business Problemhadiakhalid.34No ratings yet
- First OrderDocument16 pagesFirst Orderhadiakhalid.34No ratings yet
- Assignment NSPDEDocument14 pagesAssignment NSPDEhadiakhalid.34No ratings yet
- OT by Hamza RehmanDocument34 pagesOT by Hamza Rehmanhadiakhalid.34No ratings yet
- MATLAB CommandsDocument15 pagesMATLAB Commandshadiakhalid.34No ratings yet
- Assignment Understanding Servomechanism in Control TheoryDocument3 pagesAssignment Understanding Servomechanism in Control Theoryhadiakhalid.34No ratings yet
- SQL Queries ExerciseDocument53 pagesSQL Queries Exerciseganeshjavvadi100% (3)
- CN Exp 4Document4 pagesCN Exp 4AdityaNo ratings yet
- ITIL Process ListDocument1 pageITIL Process ListaminaNo ratings yet
- Dbms QP-15Document22 pagesDbms QP-15Gautam DemattiNo ratings yet
- NetApp NCDA Exercise GuideDocument209 pagesNetApp NCDA Exercise GuideVinay KumarNo ratings yet
- 10 - Trojans and AttacksDocument5 pages10 - Trojans and AttackssanaladresNo ratings yet
- Coco Cola Sales ReportDocument4 pagesCoco Cola Sales Reportpaki_heroNo ratings yet
- T6 - PID Controller - 2021Document36 pagesT6 - PID Controller - 2021James ChanNo ratings yet
- End-User License AgreementDocument8 pagesEnd-User License AgreementMahboob IqbalNo ratings yet
- Phat Trien Kit Cho Pic 12F683Document31 pagesPhat Trien Kit Cho Pic 12F683Nguyen NguyenNo ratings yet
- Department of Electrical and Electronic EngineeringDocument9 pagesDepartment of Electrical and Electronic EngineeringKelly Leon0% (1)
- Pointers Pointers and Dynamic Objects by Sumit Kumar NagerDocument45 pagesPointers Pointers and Dynamic Objects by Sumit Kumar NagerSumit Kumar NagerNo ratings yet
- Additional Notes Diversity and Protection SwitchingDocument2 pagesAdditional Notes Diversity and Protection SwitchingESTRAVO, Leegerald UrciaNo ratings yet
- 1 FlowchartDocument28 pages1 FlowchartKaMaL MeHtANo ratings yet
- 4294 1 Format of Six Weeks Training Report UpdatedDocument5 pages4294 1 Format of Six Weeks Training Report UpdatedSatnam Singh VirkNo ratings yet
- InfoDocument4 pagesInfoAnonymous R8CXpE8qBuNo ratings yet
- Real Time ClockDocument4 pagesReal Time ClockResearchDesignLabNo ratings yet
- Security Baseline Template V2.4 CommentsDocument88 pagesSecurity Baseline Template V2.4 CommentsCuong LeNo ratings yet
- APC BK 650 UserManDocument2 pagesAPC BK 650 UserMandkelicNo ratings yet
- Cloud Computing Unit 1Document23 pagesCloud Computing Unit 1kejagoNo ratings yet
- CIS Oracle Database 12c Benchmark v2.1.0Document297 pagesCIS Oracle Database 12c Benchmark v2.1.0Andrei SandulescuNo ratings yet
- InfoSphere Information Server Pack For SalesforceDocument38 pagesInfoSphere Information Server Pack For SalesforcefdcolonelNo ratings yet
- Priority QueueDocument4 pagesPriority Queuenupursonkusare27No ratings yet
- ASIX ProgrammerDocument62 pagesASIX ProgrammerIbrahim NazirNo ratings yet
- Roadmap Template Guide by ProductPlanDocument46 pagesRoadmap Template Guide by ProductPlanbogdan.oancea3651No ratings yet
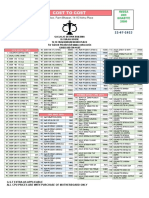
- PricelistDocument9 pagesPricelistSickboy YTNo ratings yet
- VSAN - Vi Vsan RN GuideDocument388 pagesVSAN - Vi Vsan RN GuideIgor Luna Victoria GarcíaNo ratings yet