Download as pdf or txt
You might also like
- CLOAD enDocument39 pagesCLOAD encarlos ivan carvajal ortizNo ratings yet
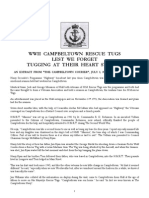
- WWII - Campbeltown Rescue Tugs - 1992 ReunionDocument2 pagesWWII - Campbeltown Rescue Tugs - 1992 ReunionKintyre On RecordNo ratings yet
- Simulation of The Subsea Pipeline-Laying Process in Deep WaterDocument10 pagesSimulation of The Subsea Pipeline-Laying Process in Deep WaterJP EDSNo ratings yet
- Time-Domain Response Based Structural AnalysisDocument9 pagesTime-Domain Response Based Structural AnalysisZmnNo ratings yet
- Computer Simulation of Moored Ship Motion Induced by Harbor Resonance in Pohang New HarborDocument12 pagesComputer Simulation of Moored Ship Motion Induced by Harbor Resonance in Pohang New HarborrezbahalNo ratings yet
- Using CFD Software To Calculate Hydrodynamic CoefficientsDocument7 pagesUsing CFD Software To Calculate Hydrodynamic CoefficientsfauzanhanifNo ratings yet
- Vibration Analysis of Beam Subjected To Moving Loads Using Finite Element MethodDocument11 pagesVibration Analysis of Beam Subjected To Moving Loads Using Finite Element MethodIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- 1 s2.0 S0029801822014731 MainDocument12 pages1 s2.0 S0029801822014731 MainJonathan ProcelNo ratings yet
- 1 s2.0 S0141118722001262 MainDocument21 pages1 s2.0 S0141118722001262 MainsaahidNo ratings yet
- Sea State Estimation Using Monitoring Data by Convolutional Neural Network (CNN)Document16 pagesSea State Estimation Using Monitoring Data by Convolutional Neural Network (CNN)bofideh597No ratings yet
- JNAOE Park Etal WallFunction 2013Document15 pagesJNAOE Park Etal WallFunction 2013Ha Nam TranNo ratings yet
- Bjoerheim Per SteinarDocument144 pagesBjoerheim Per SteinarSHARATHNo ratings yet
- Lopez Etal 2015Document11 pagesLopez Etal 2015Quién SabeNo ratings yet
- Design Optimization and Upscaling of A Semi-Submersible Oating PlatformDocument11 pagesDesign Optimization and Upscaling of A Semi-Submersible Oating PlatformKeith DixonNo ratings yet
- Ocean Engineering: Malte Riesner, Ould El MoctarDocument14 pagesOcean Engineering: Malte Riesner, Ould El MoctarSahil JawaNo ratings yet
- Marine Structures: Finn-Idar Grøtta Giske, Knut Andreas Kvåle, Bernt Johan Leira, Ole ØisethDocument18 pagesMarine Structures: Finn-Idar Grøtta Giske, Knut Andreas Kvåle, Bernt Johan Leira, Ole ØisethDak KaizNo ratings yet
- Noaa 55335 DS1-1Document20 pagesNoaa 55335 DS1-1ravi_4908No ratings yet
- Suzuki2019 Article ElasticResponseOfALight-weightDocument14 pagesSuzuki2019 Article ElasticResponseOfALight-weightNo email HAHANo ratings yet
- Ocean Engineering: Mingsheng Chen, Rodney Eatock Taylor, Yoo Sang ChooDocument12 pagesOcean Engineering: Mingsheng Chen, Rodney Eatock Taylor, Yoo Sang ChooEliotPezoZegarraNo ratings yet
- Numerical Simulation of Wave Flow Over The Overtopping Breakwater For Energy Conversion Obrec DeviceDocument8 pagesNumerical Simulation of Wave Flow Over The Overtopping Breakwater For Energy Conversion Obrec Deviceniaz ibrahimNo ratings yet
- Modelling and Analysis of Jacket PlatformDocument11 pagesModelling and Analysis of Jacket PlatformDr R Panneer SelvamNo ratings yet
- I07SN 02hadanoDocument7 pagesI07SN 02hadanocesarNo ratings yet
- Time and Cost Analysis of Jacket Structure Load Out Using SkiddingDocument6 pagesTime and Cost Analysis of Jacket Structure Load Out Using SkiddingMarianaGilNo ratings yet
- J Oceaneng 2018 01 112Document14 pagesJ Oceaneng 2018 01 112Ahmad VahidiNo ratings yet
- Ujme2 15109954Document7 pagesUjme2 15109954carlos ivan carvajal ortizNo ratings yet
- Time and Cost Analysis of Jacket Structure Load Out Using SkiddingDocument6 pagesTime and Cost Analysis of Jacket Structure Load Out Using SkiddingYadi KusmayadiNo ratings yet
- Design Analysis Procedures For Fixed Offshore Platform Jacket Structures-Ijaerdv05i0379025Document8 pagesDesign Analysis Procedures For Fixed Offshore Platform Jacket Structures-Ijaerdv05i0379025dencybk123No ratings yet
- A 6 DoF Maneuvering Model For The Rapid Estimation of Hydrod - 2020 - Ocean EngiDocument22 pagesA 6 DoF Maneuvering Model For The Rapid Estimation of Hydrod - 2020 - Ocean EngijavierzmorNo ratings yet
- Endo - 2000 - Behavior of a VLFS and an airplane during takeofflanding run in wave condition(2)-annotated(1)Document15 pagesEndo - 2000 - Behavior of a VLFS and an airplane during takeofflanding run in wave condition(2)-annotated(1)Tính Nguyễn TrungNo ratings yet
- Optimal Feedback Guidance Algorithms For Planetary PDFDocument20 pagesOptimal Feedback Guidance Algorithms For Planetary PDFSimone DascanioNo ratings yet
- Analysis of Offshore Jacket PlatformDocument8 pagesAnalysis of Offshore Jacket PlatformMuralidhar YarakalaNo ratings yet
- A Comparative Study On The Dynamic Response of Three Semisubmersible Floating Offshore Wind TurbinesDocument11 pagesA Comparative Study On The Dynamic Response of Three Semisubmersible Floating Offshore Wind TurbinesVũ Quý HoàNo ratings yet
- Pbdiii Paper 418Document9 pagesPbdiii Paper 418rihongkeeNo ratings yet
- Jacket Response AnalysisDocument8 pagesJacket Response Analysisrobert.johns1028No ratings yet
- Recursive Analysis of Added Mass, Damping Coefficient, and Wave-ExcitingDocument15 pagesRecursive Analysis of Added Mass, Damping Coefficient, and Wave-ExcitingDiyanosh HedayatiNo ratings yet
- Galoa-Proceedings - SOBENA 2020 - 128671Document8 pagesGaloa-Proceedings - SOBENA 2020 - 128671Lenin ValerioNo ratings yet
- Toward Optimization Using Unsteady CFD SimulationDocument6 pagesToward Optimization Using Unsteady CFD SimulationAntonio LopezNo ratings yet
- SimulationofDeep WaterWavesBasedonDocument5 pagesSimulationofDeep WaterWavesBasedonMuntoiaNo ratings yet
- Analysis of Propulsion Performance of KVLCC2 in Waves: July 2015Document11 pagesAnalysis of Propulsion Performance of KVLCC2 in Waves: July 2015Abhishek AroraNo ratings yet
- Study PDFDocument10 pagesStudy PDFDaniel Cano QuinteroNo ratings yet
- Modeling and Analysis of Offshore Jacket PlatformDocument9 pagesModeling and Analysis of Offshore Jacket Platformgkc1977100% (1)
- Erasmus 2022 FinalDocument51 pagesErasmus 2022 FinalGabo DíazNo ratings yet
- Wind Sea and Swell Estimation-Energy equivalence-IIDocument14 pagesWind Sea and Swell Estimation-Energy equivalence-IIranjeetNo ratings yet
- Seismic Design of Port StructuresDocument15 pagesSeismic Design of Port StructuresJulian SandovalNo ratings yet
- Impact of Freestream Turbulence On The Boom Length: Maduako E. Okorie & Professor FREDDIE L. INAMBAODocument14 pagesImpact of Freestream Turbulence On The Boom Length: Maduako E. Okorie & Professor FREDDIE L. INAMBAOTJPRC PublicationsNo ratings yet
- 2011-IJNOAE Time-Domain Hybrid Method For Simulating Large Amplitude Motions of Ships Advancing in WavesDocument8 pages2011-IJNOAE Time-Domain Hybrid Method For Simulating Large Amplitude Motions of Ships Advancing in WavesFrank LiouNo ratings yet
- Hydrodynamic Analysis of A Semi-Submersible Wind-Tidal Combined Power Generation DeviceDocument10 pagesHydrodynamic Analysis of A Semi-Submersible Wind-Tidal Combined Power Generation DeviceDr R Panneer SelvamNo ratings yet
- Mooring Design & Mooring Analysis IndiaDocument17 pagesMooring Design & Mooring Analysis IndiaMermaid coNo ratings yet
- 2014 Innovative Approach To Design Truncated Mooring System Based On Static and Damping EquivalentDocument13 pages2014 Innovative Approach To Design Truncated Mooring System Based On Static and Damping EquivalentXinkuan YanNo ratings yet
- A Study On Hydrodynamic Coefficients Estimation ofDocument8 pagesA Study On Hydrodynamic Coefficients Estimation ofshahjadaNo ratings yet
- Omae 2010-20190Document7 pagesOmae 2010-20190Soledad AceitunoNo ratings yet
- Comparing The Economic Feasibility of of PDFDocument15 pagesComparing The Economic Feasibility of of PDFNarayanan JayachandranNo ratings yet
- The Prediction of Ship Added Resistanc at The Preliminary Design Stage by The Use of An Artificial Neural NetworkDocument14 pagesThe Prediction of Ship Added Resistanc at The Preliminary Design Stage by The Use of An Artificial Neural NetworkLuis Angel ZorrillaNo ratings yet
- Performance of A Fill Dam Based On The Performance-Based Design Concept and Study of A Seismic Retrofitting MethodDocument11 pagesPerformance of A Fill Dam Based On The Performance-Based Design Concept and Study of A Seismic Retrofitting Methodedward.e77No ratings yet
- Gao2019 1Document9 pagesGao2019 1Carlos Eduardo Simoes de AlmeidaNo ratings yet
- Structural Strength Evaluation of A 3000 DWT RiverDocument17 pagesStructural Strength Evaluation of A 3000 DWT Riverluckystrike9008No ratings yet
- 734 2804 1 PBDocument12 pages734 2804 1 PBgjsfwhjdsncvNo ratings yet
- Design Modelling and Analysis of A Large FloatingDocument29 pagesDesign Modelling and Analysis of A Large FloatingAdrNo ratings yet
- Guilan Tao, Jian Ruan, Yingying Pan, Yajun Yan: Study On Impact Force Calculation Formula of Ship Lock Gravity DolphinDocument6 pagesGuilan Tao, Jian Ruan, Yingying Pan, Yajun Yan: Study On Impact Force Calculation Formula of Ship Lock Gravity DolphinAndree YudiNo ratings yet
- Elastic-Plastic MDOFDocument19 pagesElastic-Plastic MDOFDan AlexandrescuNo ratings yet
- Seabed Seismic Techniques: QC and Data Processing KeysFrom EverandSeabed Seismic Techniques: QC and Data Processing KeysRating: 5 out of 5 stars5/5 (2)
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Ultimate Load Capacities of Mooring Bollards and Hull Foundation StructuresDocument8 pagesUltimate Load Capacities of Mooring Bollards and Hull Foundation Structurescarlos ivan carvajal ortizNo ratings yet
- V15N4 Essay Den Hertog LRDocument10 pagesV15N4 Essay Den Hertog LRcarlos ivan carvajal ortizNo ratings yet
- ULTIBALLAST NAVAL BrochureDocument2 pagesULTIBALLAST NAVAL Brochurecarlos ivan carvajal ortizNo ratings yet
- W0320.405.001.TA - Anti Rooling System Final HMC - CountersignedDocument58 pagesW0320.405.001.TA - Anti Rooling System Final HMC - Countersignedcarlos ivan carvajal ortizNo ratings yet
- Experimental and Numerical Bending Analysis of SteDocument7 pagesExperimental and Numerical Bending Analysis of Stecarlos ivan carvajal ortizNo ratings yet
- Ujme2 15109954Document7 pagesUjme2 15109954carlos ivan carvajal ortizNo ratings yet
- HERC-Weight and Weight Distribution - Jan 2021-SummaryDocument2 pagesHERC-Weight and Weight Distribution - Jan 2021-Summarycarlos ivan carvajal ortizNo ratings yet
- Ruud Habing - Masters ThesisDocument94 pagesRuud Habing - Masters Thesiscarlos ivan carvajal ortizNo ratings yet
- Alion-Proteus Software LTR 26aug09 Rev DDocument2 pagesAlion-Proteus Software LTR 26aug09 Rev Dcarlos ivan carvajal ortizNo ratings yet
- Fortissimo SuccessStory 605 Wavec VicusdtDocument2 pagesFortissimo SuccessStory 605 Wavec Vicusdtcarlos ivan carvajal ortizNo ratings yet
- Guidelines For Preparation of Semi - Submersible Vessel Transportation Manual 2020Document17 pagesGuidelines For Preparation of Semi - Submersible Vessel Transportation Manual 2020carlos ivan carvajal ortizNo ratings yet
- Class Presentation CCS323050 Matthew PearceDocument94 pagesClass Presentation CCS323050 Matthew Pearcecarlos ivan carvajal ortizNo ratings yet
- ULTIBALLAST Ships BrochureDocument2 pagesULTIBALLAST Ships Brochurecarlos ivan carvajal ortizNo ratings yet
- DNV GL - SP568 - TAK00001HG - Exp 24 - 01 - 2024Document3 pagesDNV GL - SP568 - TAK00001HG - Exp 24 - 01 - 2024carlos ivan carvajal ortizNo ratings yet
- Cable Catalogue - SimpleDocument8 pagesCable Catalogue - Simplecarlos ivan carvajal ortizNo ratings yet
- MSC Thesis PDM-CADCAM Interfacing 28-8-2015 Final 11Document144 pagesMSC Thesis PDM-CADCAM Interfacing 28-8-2015 Final 11carlos ivan carvajal ortizNo ratings yet
- Military Boats: Providing Critical Safety SolutionsDocument20 pagesMilitary Boats: Providing Critical Safety Solutionscarlos ivan carvajal ortizNo ratings yet
- Review of Fillet Weld Strength Parameters: For ShipbuildingDocument64 pagesReview of Fillet Weld Strength Parameters: For Shipbuildingcarlos ivan carvajal ortizNo ratings yet
- Robert Allan - Escort Tug StabilityDocument28 pagesRobert Allan - Escort Tug Stabilitycarlos ivan carvajal ortiz100% (1)
- Deliverable-2005-333r13-Tank Boundary Penetration Testing Final Report-NASSCODocument44 pagesDeliverable-2005-333r13-Tank Boundary Penetration Testing Final Report-NASSCOcarlos ivan carvajal ortizNo ratings yet
- HadelkampDocument190 pagesHadelkampcarlos ivan carvajal ortizNo ratings yet
- Qingdao Grandsea Boat Co.,LtdDocument2 pagesQingdao Grandsea Boat Co.,Ltdcarlos ivan carvajal ortiz100% (1)
- Diab Guideline To Core and SandwichDocument32 pagesDiab Guideline To Core and Sandwichcarlos ivan carvajal ortizNo ratings yet
- Multi-Phase Flow-Water Fall-SimScaleDocument24 pagesMulti-Phase Flow-Water Fall-SimScalecarlos ivan carvajal ortizNo ratings yet
- Diab Marine BrochureDocument12 pagesDiab Marine Brochurecarlos ivan carvajal ortizNo ratings yet
- Princecraft Boats 2016 CatalogueDocument52 pagesPrincecraft Boats 2016 Cataloguecarlos ivan carvajal ortizNo ratings yet
- Working Load To Break Load: Safety Factors in Composite Yacht StructuresDocument8 pagesWorking Load To Break Load: Safety Factors in Composite Yacht Structurescarlos ivan carvajal ortizNo ratings yet
- 2017 SeaDoo RXT X 300 SpecsDocument2 pages2017 SeaDoo RXT X 300 Specscarlos ivan carvajal ortizNo ratings yet
- CLASS NK Part C Hull Construction and EquipmentDocument737 pagesCLASS NK Part C Hull Construction and EquipmentDian Nafi' Ahmad67% (3)
- Solutions Manual For Introduction To Matlab 3e by Delores M Etter 013377001xDocument37 pagesSolutions Manual For Introduction To Matlab 3e by Delores M Etter 013377001xcourbheadpan22xt100% (20)
- Loadcase: Case 08 - Crane Operation Demo Delftload Demo: Calculation Settings Non-Buoyant TanksDocument11 pagesLoadcase: Case 08 - Crane Operation Demo Delftload Demo: Calculation Settings Non-Buoyant TanksVien ArellanoNo ratings yet
- Chapter 3 Reading ExerciseDocument9 pagesChapter 3 Reading ExercisedianaalejandroNo ratings yet
- Chapter-1: HistoryDocument19 pagesChapter-1: HistoryraisNo ratings yet
- CV Tri Andi HariadiDocument1 pageCV Tri Andi HariadiAlikaNo ratings yet
- All About ECDISDocument12 pagesAll About ECDISdassi99No ratings yet
- Re-Sit & Re-Exam May 2024 - StudentDocument1 pageRe-Sit & Re-Exam May 2024 - StudentFlavin Franklin VazNo ratings yet
- Training Center DirectoryDocument16 pagesTraining Center DirectoryjonesalvarezcastroNo ratings yet
- STS Extract From MarineDocument7 pagesSTS Extract From MarineWirote Archeepkosol100% (1)
- RESUME Naval Architect-RkDocument2 pagesRESUME Naval Architect-RkRama KrishnaNo ratings yet
- Air Cargo Freight Rates From USA To Australia and PacificDocument3 pagesAir Cargo Freight Rates From USA To Australia and Pacifica2globalNo ratings yet
- 11708-Article Text PDF-34370-4-10-20180817Document9 pages11708-Article Text PDF-34370-4-10-20180817ankitNo ratings yet
- Shipping Container Tracking and Tracing - MSCDocument2 pagesShipping Container Tracking and Tracing - MSCShiv KumarNo ratings yet
- International Association of Dry Cargo Shipwners INTERCARGODocument8 pagesInternational Association of Dry Cargo Shipwners INTERCARGOrojoubeda63No ratings yet
- OIC BS MARINE ENGINEERING C3 ReviewerDocument6 pagesOIC BS MARINE ENGINEERING C3 ReviewerLanceNo ratings yet
- Phil Stud 101Document3 pagesPhil Stud 101Rusell Ryuji ReyesNo ratings yet
- Draught Survey 01Document1 pageDraught Survey 01Plamen BogdanovNo ratings yet
- 2021-2022 Annual Report BMAPA Protocol For Reporting Archaeological FindsDocument74 pages2021-2022 Annual Report BMAPA Protocol For Reporting Archaeological FindsWessex Archaeology100% (1)
- Ionian Sea FosDocument2 pagesIonian Sea FosSurajPandeyNo ratings yet
- Ocean Guardian Data Sheet - HIDocument2 pagesOcean Guardian Data Sheet - HItukidutraNo ratings yet
- FlightSafety RNPDocument2 pagesFlightSafety RNPsayersben100% (1)
- My Favorite Place in Your Home TownDocument2 pagesMy Favorite Place in Your Home TownRummon RahmanNo ratings yet
- Oriental Assurance Corporation Vs Ca FactsDocument1 pageOriental Assurance Corporation Vs Ca FactsBLACK mambaNo ratings yet
- Tratare Apa de Balast 3 PDFDocument210 pagesTratare Apa de Balast 3 PDFTache Traian MarianNo ratings yet
- Dacon Rescue Frame BrochureDocument2 pagesDacon Rescue Frame BrochureAbu UmarNo ratings yet
- MGN 495Document24 pagesMGN 495taribraNo ratings yet
- $MP 015 25Document12 pages$MP 015 25Mohammad Sli100% (1)
- Fasa 2330 BattlehawksDocument46 pagesFasa 2330 BattlehawksMarcos Inki100% (1)