Download as pdf or txt
You might also like
- Polaris 1985-1995Document657 pagesPolaris 1985-1995theraghorn0958% (12)
- CTL-OP 111 Ed.2.0 PDFDocument5 pagesCTL-OP 111 Ed.2.0 PDFBioingenieria LANo ratings yet
- Electronic Kanban Worksheet For The Design and Implementation of Virtual or Electronic Kanban SystemsDocument33 pagesElectronic Kanban Worksheet For The Design and Implementation of Virtual or Electronic Kanban SystemsMostafa FawzyNo ratings yet
- Hhhhhhhhhhhiiii: United States PatentDocument11 pagesHhhhhhhhhhhiiii: United States PatentzicxyNo ratings yet
- Us 6304954Document28 pagesUs 6304954Ahmed EidNo ratings yet
- United States Patent: Gopal Et Al. Dec. 19, 2000Document17 pagesUnited States Patent: Gopal Et Al. Dec. 19, 2000Luiza RodriguesNo ratings yet
- Us6280170 PDFDocument9 pagesUs6280170 PDFمحمود عيسيNo ratings yet
- United States Patent (10) Patent No.: US 8,027.264 B2Document11 pagesUnited States Patent (10) Patent No.: US 8,027.264 B2feyn987No ratings yet
- United States Patent (19) : 11 Patent Number: 5,755,291 45) Date of Patent: May 26, 1998Document21 pagesUnited States Patent (19) : 11 Patent Number: 5,755,291 45) Date of Patent: May 26, 1998Justus VenterNo ratings yet
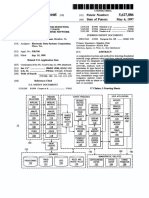
- United States Patent 19 11 Patent Number: 5,627,886: Bowman 45 Date of Patent: May 6, 1997Document14 pagesUnited States Patent 19 11 Patent Number: 5,627,886: Bowman 45 Date of Patent: May 6, 1997Ali RazaNo ratings yet
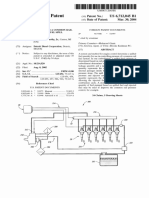
- Unlted States Patent (10) Patent N0.2 US 7,464,259 B2Document16 pagesUnlted States Patent (10) Patent N0.2 US 7,464,259 B2حسام.علاوي جاسمNo ratings yet
- United States Patent (10) Patent No.: US 6,341,271 B1: Heather Ann Relyea, Niskayuna Wo 135, 40 or GO6F/17/60Document15 pagesUnited States Patent (10) Patent No.: US 6,341,271 B1: Heather Ann Relyea, Niskayuna Wo 135, 40 or GO6F/17/60Syed IzzatNo ratings yet
- United States Patent (10) Patent No.: US 6,971,187 B1Document17 pagesUnited States Patent (10) Patent No.: US 6,971,187 B1Andri handokoNo ratings yet
- United States Patent (10) Patent No.: US 7,948,986 B1Document27 pagesUnited States Patent (10) Patent No.: US 7,948,986 B1Sávio MirandaNo ratings yet
- Test Code For Aircooled Condensers: Ooling Echnology NstituteDocument22 pagesTest Code For Aircooled Condensers: Ooling Echnology NstituteAmri YusronNo ratings yet
- Eng103 7Document7 pagesEng103 7Qa ValidationNo ratings yet
- Us8464763 PDFDocument25 pagesUs8464763 PDFCuongSuproNo ratings yet
- United States Patent: (12) (10) Patent N0.: US 6,353,767 B1Document14 pagesUnited States Patent: (12) (10) Patent N0.: US 6,353,767 B1Nguyen Hoang DungNo ratings yet
- Process Control Philosophy Rev A PDFDocument48 pagesProcess Control Philosophy Rev A PDFsswahyudi100% (3)
- 2009 - Us7500530 - Control SystemDocument9 pages2009 - Us7500530 - Control SystemCường Nguyễn QuốcNo ratings yet
- Numerical Assurance Patent - US6009554Document6 pagesNumerical Assurance Patent - US6009554Candy Baldwin PirieNo ratings yet
- Guia de InspeçãoDocument9 pagesGuia de InspeçãoTrullia Construtora IncorporadoraNo ratings yet
- US10629308Document35 pagesUS10629308Hirjana Bebeci KokalariNo ratings yet
- Eye Notch Range: Ls Measured Engine - Yes. ADocument11 pagesEye Notch Range: Ls Measured Engine - Yes. ABala RajuNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument13 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentSyed IzzatNo ratings yet
- Distributed Software TestingDocument26 pagesDistributed Software TestingJasNo ratings yet
- Train Operations MGMTDocument8 pagesTrain Operations MGMTmanoj maniNo ratings yet
- A Chemically Enhanced Oil Recovery Simulation Benchmark: of of 15 ofDocument3 pagesA Chemically Enhanced Oil Recovery Simulation Benchmark: of of 15 ofashish dutt sharmaNo ratings yet
- 2 of 3 (Process Simulation) How To Do It RightDocument24 pages2 of 3 (Process Simulation) How To Do It RightErwinApriandiNo ratings yet
- United States Patent (10) Patent No.: US 6,418,498 B1: Martwick (45) Date of Patent: Jul. 9, 2002Document7 pagesUnited States Patent (10) Patent No.: US 6,418,498 B1: Martwick (45) Date of Patent: Jul. 9, 2002Makhfie NurNo ratings yet
- US8416759 CFO Correction PatentDocument14 pagesUS8416759 CFO Correction PatentSagar SalweNo ratings yet
- United States Patent (19) 11 Patent Number: 5,265,567: Nudds Et Al. (45) Date of Patent: Nov. 30, 1993Document8 pagesUnited States Patent (19) 11 Patent Number: 5,265,567: Nudds Et Al. (45) Date of Patent: Nov. 30, 1993Bala RajuNo ratings yet
- Ensuring Healthiness and Availability of Black Start System of Gas StationsDocument12 pagesEnsuring Healthiness and Availability of Black Start System of Gas StationsAbhiroop AwasthiNo ratings yet
- Kanban Control Cycle SystemDocument13 pagesKanban Control Cycle SystemMostafa FawzyNo ratings yet
- A 125501Document52 pagesA 125501Definal ChaniagoNo ratings yet
- Patent For TachometerDocument24 pagesPatent For Tachometerjdbs8446No ratings yet
- US8314681Document15 pagesUS8314681Carlos OrtegaNo ratings yet
- US6029951, Varco, Control System For DrawworksDocument12 pagesUS6029951, Varco, Control System For DrawworksDhrubajyoti BoraNo ratings yet
- ASP-NPD-03 (Temporary Change of Process Control)Document6 pagesASP-NPD-03 (Temporary Change of Process Control)akash.vd.1603No ratings yet
- 2011 - Us7954558 - Devices and Methods For Power Control in Horizontal Directional DrillingDocument13 pages2011 - Us7954558 - Devices and Methods For Power Control in Horizontal Directional DrillingCường Nguyễn QuốcNo ratings yet
- 6107 - 08 - r0 - Comp BDocument67 pages6107 - 08 - r0 - Comp BMohammad MohseniNo ratings yet
- Ulllted States Patent (10) Patent N0.: US 8,495,598 B2Document11 pagesUlllted States Patent (10) Patent N0.: US 8,495,598 B2david19775891No ratings yet
- PAUT Procedure EEISDocument13 pagesPAUT Procedure EEISZakirUllahNo ratings yet
- United States Patent (19) : Silva, JRDocument12 pagesUnited States Patent (19) : Silva, JRnooraaNo ratings yet
- Efectos deDocument13 pagesEfectos deMozãoFragaNo ratings yet
- The Importance of SAT and IST in Mission Critical FacilitiesDocument6 pagesThe Importance of SAT and IST in Mission Critical FacilitiesOtto F OttONo ratings yet
- C&i FolderDocument19 pagesC&i FolderSandip GaraiNo ratings yet
- UVM RamakrishnaDocument54 pagesUVM Ramakrishnahv_chillal880% (2)
- Sensor Failure Detection For Jet Engines: Nasa 101396Document44 pagesSensor Failure Detection For Jet Engines: Nasa 101396Morgen GumpNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument19 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentAlex KattamisNo ratings yet
- Control of Rotor Vibrations Using Hybrid Squeeze Film DampersDocument267 pagesControl of Rotor Vibrations Using Hybrid Squeeze Film DamperselshafeiNo ratings yet
- CH 29Document20 pagesCH 29aprilswapnilNo ratings yet
- United States Patent (10) Patent No.: US 6,182,268 B1Document16 pagesUnited States Patent (10) Patent No.: US 6,182,268 B1nidhalNo ratings yet
- Us8608097 PDFDocument10 pagesUs8608097 PDFKrozeNo ratings yet
- United States Patent (10) Patent No.: US 6,801,157 B2: P Is SH Adjusted Under 35 Cited by ExaminerDocument16 pagesUnited States Patent (10) Patent No.: US 6,801,157 B2: P Is SH Adjusted Under 35 Cited by ExaminerEdda Andrade RosalesNo ratings yet
- Numerical Designed Experiment To Optimize A Ported Shroud To Extend The Operability Margin of A Centrifugal CompressorDocument9 pagesNumerical Designed Experiment To Optimize A Ported Shroud To Extend The Operability Margin of A Centrifugal CompressorDhanasekar KNo ratings yet
- Sop For FmeaDocument2 pagesSop For FmeaYanuar KholisNo ratings yet
- Process Reaction CurveDocument6 pagesProcess Reaction Curveindra100% (1)
- US7802120Document62 pagesUS7802120charitablegrinderNo ratings yet
- Hc-Ac2-T Advanced Auto Air Cond Demonstration Unit Exp Man Langgeng Indo 9916 PDFDocument122 pagesHc-Ac2-T Advanced Auto Air Cond Demonstration Unit Exp Man Langgeng Indo 9916 PDFJimmy Septariansyah PutraNo ratings yet
- Accu-FLOW PATENTDocument16 pagesAccu-FLOW PATENTshadyghanemNo ratings yet
- PB4000, 4030 SeriesDocument2 pagesPB4000, 4030 SeriesAlbert Hauw CeNo ratings yet
- Example 21: Gabriel Dawe S Rainbow Coloured Curves-Annotated Student WorkDocument12 pagesExample 21: Gabriel Dawe S Rainbow Coloured Curves-Annotated Student WorklailaNo ratings yet
- C-Programming-Basic Solved MCQs (Set-2)Document7 pagesC-Programming-Basic Solved MCQs (Set-2)fcbolarinNo ratings yet
- Veacam Solar Wifi 4G AI Dual-Lens Camera Price List-2402V3Document3 pagesVeacam Solar Wifi 4G AI Dual-Lens Camera Price List-2402V3Juan MartinezNo ratings yet
- An Efficient Privacy-Preserving Credit Score System Based On Non Interactive Zero-Knowledge ProofDocument5 pagesAn Efficient Privacy-Preserving Credit Score System Based On Non Interactive Zero-Knowledge Proofbits computersNo ratings yet
- Chapter 16 Data Management Organization and Role Expectations - DONE DONE DONEDocument17 pagesChapter 16 Data Management Organization and Role Expectations - DONE DONE DONERoche ChenNo ratings yet
- North Leads ListDocument8 pagesNorth Leads Listrun torqNo ratings yet
- Es19btech11024 HW1Document3 pagesEs19btech11024 HW1Salam RockybhaiNo ratings yet
- Recursive Analysis of Added Mass, Damping Coefficient, and Wave-ExcitingDocument15 pagesRecursive Analysis of Added Mass, Damping Coefficient, and Wave-ExcitingDiyanosh HedayatiNo ratings yet
- 0354-98361800278F Dolomite Sintering in Shaft Kiln PDFDocument13 pages0354-98361800278F Dolomite Sintering in Shaft Kiln PDFtaghdirimNo ratings yet
- Statistics AssignmentDocument20 pagesStatistics AssignmentHimadu GethminNo ratings yet
- LE10s ARM 5858938-1EN-Rev3Document343 pagesLE10s ARM 5858938-1EN-Rev3The LamNo ratings yet
- Hadiya Final GuidelineDocument10 pagesHadiya Final GuidelineAbdallah FtouniNo ratings yet
- 459251104-DCS-UH-1H-Flight-Manual-EN-pdf 3Document1 page459251104-DCS-UH-1H-Flight-Manual-EN-pdf 3mav87th-1No ratings yet
- 20 Series Catalog v2016Document68 pages20 Series Catalog v2016h_878236333No ratings yet
- Futurastic ProjectDocument2 pagesFuturastic ProjectabsNo ratings yet
- English Mill NGC Operator's Manual 2018Document474 pagesEnglish Mill NGC Operator's Manual 2018Bolek ŻmigrodzkiNo ratings yet
- Smart Positioner IP80101Document24 pagesSmart Positioner IP80101Grace DadzieNo ratings yet
- Work Shop Manual: Öhlins Steering Damper Road & TrackDocument10 pagesWork Shop Manual: Öhlins Steering Damper Road & TrackEugenioCandrevaNo ratings yet
- 100 - Generator Stator Earth Fault ProtectionDocument10 pages100 - Generator Stator Earth Fault ProtectionPraneeth ReddyNo ratings yet
- Siprotec 6mu85: Merging UnitDocument2 pagesSiprotec 6mu85: Merging UnitrafaelmontagnerNo ratings yet
- BS Iso TR 08363-1997 (1999)Document16 pagesBS Iso TR 08363-1997 (1999)Олег СоловьевNo ratings yet
- Astm A285 Grade CDocument3 pagesAstm A285 Grade CCastoriadisNo ratings yet
- 2017.10 OEM Bulletin Volvo Coolant 1Document1 page2017.10 OEM Bulletin Volvo Coolant 1Limosh BsNo ratings yet
- National Transmission and Despatch CompanyDocument1 pageNational Transmission and Despatch CompanyRabia AbdullahNo ratings yet
- Heart Disease Prediction Using Machine Learning Techniques: AbstractDocument5 pagesHeart Disease Prediction Using Machine Learning Techniques: Abstractshital shermaleNo ratings yet
- Image Encryption Using Elliptic Curve Cryptography: SciencedirectDocument10 pagesImage Encryption Using Elliptic Curve Cryptography: SciencedirectNguyễn Quang HuyNo ratings yet
- The X1Document23 pagesThe X1Buddah KushNo ratings yet