Download as pdf or txt
You might also like
- IPTV Channels ListDocument81 pagesIPTV Channels ListElda Stefa0% (1)
- DTC P205C - 00 (MZR-CD 2.2)Document2 pagesDTC P205C - 00 (MZR-CD 2.2)asdfNo ratings yet
- IJFTET - Vol. 4-Issue 1 - A Survey of Routing Protocol in Vanet With Its Pros and ConsDocument6 pagesIJFTET - Vol. 4-Issue 1 - A Survey of Routing Protocol in Vanet With Its Pros and ConsIJFTETNo ratings yet
- Vehicles Awake Routing Protocol With Analysis Determine Knowledge Perception For VANETDocument6 pagesVehicles Awake Routing Protocol With Analysis Determine Knowledge Perception For VANETEditor IJTSRDNo ratings yet
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDocument8 pagesIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)No ratings yet
- Novel Routing Protocol For Vehicular AdhocDocument5 pagesNovel Routing Protocol For Vehicular AdhocconwamcNo ratings yet
- Intersection-Based Geographical Routing Protocol For Vanets: A Proposal and AnalysisDocument15 pagesIntersection-Based Geographical Routing Protocol For Vanets: A Proposal and AnalysisAadan CaddeNo ratings yet
- Raza - IDJ2022 - U-Assisted VANETDocument17 pagesRaza - IDJ2022 - U-Assisted VANETMohammad ArifNo ratings yet
- Comparison and Analysis of Greedy Forwarding Using BNGF Method in Different Vehicular Traffic ScenariosDocument14 pagesComparison and Analysis of Greedy Forwarding Using BNGF Method in Different Vehicular Traffic ScenariosijngnNo ratings yet
- Performance of VANET Through Realistic Large Scale Fading ChannelsDocument6 pagesPerformance of VANET Through Realistic Large Scale Fading ChannelsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Survey PaperDocument4 pagesSurvey PaperKarthik NagNo ratings yet
- Vehicular Ad Hoc Networks and Dedicated Short-Range CommunicationDocument56 pagesVehicular Ad Hoc Networks and Dedicated Short-Range CommunicationSaira GillaniNo ratings yet
- Social CLWPR: A Socially Enhanced Position Based Routing Protocol For Handling Misbehaviour InvanetsDocument6 pagesSocial CLWPR: A Socially Enhanced Position Based Routing Protocol For Handling Misbehaviour InvanetsAchref HaddajiNo ratings yet
- Routing Protocols in Vehicular Ad Hoc Networks: A Survey and Future PerspectivesDocument20 pagesRouting Protocols in Vehicular Ad Hoc Networks: A Survey and Future PerspectivesVreddy ReddyNo ratings yet
- Increasing The Route Lifetime Stability of Lar Protocol For Vanets in Highway EnvironmentDocument10 pagesIncreasing The Route Lifetime Stability of Lar Protocol For Vanets in Highway EnvironmentnabilNo ratings yet
- A Novel Reliable Low-Latency Multipath Routing Scheme For Vehicular Ad Hoc NetworksDocument19 pagesA Novel Reliable Low-Latency Multipath Routing Scheme For Vehicular Ad Hoc NetworksMahabub SubhaniNo ratings yet
- Cross Layer Based Congestion Free Route Selection in Vehicular Ad Hoc NetworksDocument18 pagesCross Layer Based Congestion Free Route Selection in Vehicular Ad Hoc NetworksAIRCC - IJCNCNo ratings yet
- Literature SurveyDocument3 pagesLiterature SurveypooanajiNo ratings yet
- Particle Swarm Optimization Based Routing Method For Vehicular Ad-Hoc NetworkDocument7 pagesParticle Swarm Optimization Based Routing Method For Vehicular Ad-Hoc Networkoumaima Al bakaliNo ratings yet
- Accepted Manuscript: Vehicular CommunicationsDocument33 pagesAccepted Manuscript: Vehicular CommunicationsManoj KumarNo ratings yet
- Thesis 2020Document5 pagesThesis 2020Abinet AdemaNo ratings yet
- A Survey On Repudiation On VANETDocument10 pagesA Survey On Repudiation On VANETarcherselevatorsNo ratings yet
- A Survey of Vehicular Ad Hoc Network Routing Protocols: Journal of Electrical and Electronic EngineeringDocument5 pagesA Survey of Vehicular Ad Hoc Network Routing Protocols: Journal of Electrical and Electronic EngineeringTaufik Bagus AfandiNo ratings yet
- Prologue: 1.1 PreambleDocument10 pagesPrologue: 1.1 PreambleAshok KrishnaNo ratings yet
- Reinforcement Learning-Based Routing Protocols For Vehicular Ad Hoc Networks: A Comparative SurveyDocument38 pagesReinforcement Learning-Based Routing Protocols For Vehicular Ad Hoc Networks: A Comparative Surveybhavana.sd86No ratings yet
- Khakbaz2010 PDFDocument5 pagesKhakbaz2010 PDFNedrà TrabNo ratings yet
- Link State RoutingDocument16 pagesLink State Routingnikpetar1No ratings yet
- Design and Implementation of Hybrid Routing Algorithm For VANETDocument5 pagesDesign and Implementation of Hybrid Routing Algorithm For VANETWARSE JournalsNo ratings yet
- DAWN: A Density Adaptive Routing For Deadline-Based Data Collection in Vehicular Delay Tolerant NetworksDocument12 pagesDAWN: A Density Adaptive Routing For Deadline-Based Data Collection in Vehicular Delay Tolerant NetworksRavi DharawadkarNo ratings yet
- 1 s2.0 S2352864817301736 MainDocument14 pages1 s2.0 S2352864817301736 MainnasnousaNo ratings yet
- Mis 2019Document16 pagesMis 2019nabilNo ratings yet
- 27 Ameer AlieeDocument6 pages27 Ameer Alieeemailkot66No ratings yet
- Fawaz TITS12Document16 pagesFawaz TITS12Mauricio José Il-PanaderoNo ratings yet
- Ren 2016Document11 pagesRen 2016Hiba AyoubNo ratings yet
- A Novel Approach To Efficient and Reliable RoutingDocument4 pagesA Novel Approach To Efficient and Reliable RoutingconwamcNo ratings yet
- Solving Traffic Congestion - An Application of Vanet: Michail PapoutsidakisDocument4 pagesSolving Traffic Congestion - An Application of Vanet: Michail PapoutsidakisvanpointNo ratings yet
- Performance Evaluation of Data Disseminations For Vehicular Ad Hoc Networks in Highway ScenariosDocument6 pagesPerformance Evaluation of Data Disseminations For Vehicular Ad Hoc Networks in Highway ScenariosragouNo ratings yet
- Taherkhani 2016Document11 pagesTaherkhani 2016م/محمد عبده علي احمدNo ratings yet
- Situation-Aware QoS Routing Algorithm For Vehicular Ad Hoc NetworksDocument16 pagesSituation-Aware QoS Routing Algorithm For Vehicular Ad Hoc Networksaidden03No ratings yet
- A Survey On Vanets Security Attacks and Sybil Attack DetectionDocument18 pagesA Survey On Vanets Security Attacks and Sybil Attack DetectionAdnan AliNo ratings yet
- 4 IjecsDocument5 pages4 IjecsPiyush ChouhanNo ratings yet
- CN PDFDocument12 pagesCN PDFanon_863369228No ratings yet
- Multi-Layer Problems and Solutions in Vanets: A ReviewDocument19 pagesMulti-Layer Problems and Solutions in Vanets: A ReviewIk RamNo ratings yet
- Predicting The Longest Route Lifetime As The Most Stable Route Between Two Vehicles in VANETDocument9 pagesPredicting The Longest Route Lifetime As The Most Stable Route Between Two Vehicles in VANETnabilNo ratings yet
- Efficient Data Dissemination in Urban Vanets Parked Vehicles Are Natural InfrastructuresDocument12 pagesEfficient Data Dissemination in Urban Vanets Parked Vehicles Are Natural Infrastructuresrehu1976No ratings yet
- VC-MAC: A Cooperative MAC Protocol in Vehicular NetworksDocument11 pagesVC-MAC: A Cooperative MAC Protocol in Vehicular NetworksjeevithaNo ratings yet
- Reliability and ConnecReliability and Connectivity Analysis of Vehicluar Ad Hoc Networks For A Highway Tunneltivity AnalysisDocument6 pagesReliability and ConnecReliability and Connectivity Analysis of Vehicluar Ad Hoc Networks For A Highway Tunneltivity AnalysisNaser MovahhediniaNo ratings yet
- 2013 Procedia Technology MojtabaDocument7 pages2013 Procedia Technology MojtabaMahamod IsmailNo ratings yet
- Multipath Routing Backbone For Improving Qos in Mobile Ad Hoc NetworksDocument9 pagesMultipath Routing Backbone For Improving Qos in Mobile Ad Hoc NetworksFais Fadlun RaisNo ratings yet
- S - 2 ITS: Tudy of The Effect of Velocity On End TO End Delay For V V Communication inDocument8 pagesS - 2 ITS: Tudy of The Effect of Velocity On End TO End Delay For V V Communication inijngnNo ratings yet
- 1 Topic Selection Background and Research Significance 1.1 Background of Topic SelectionDocument7 pages1 Topic Selection Background and Research Significance 1.1 Background of Topic SelectionOscar LarutaNo ratings yet
- 1.1 Problem Statement: It Is Sometimes NotDocument4 pages1.1 Problem Statement: It Is Sometimes Notpiyushji125No ratings yet
- Performances of Ad Hoc Networks Under Deterministic and Probabilistic Channel Conditions: Cases For Single Path and Multipath Routing ProtocolsDocument21 pagesPerformances of Ad Hoc Networks Under Deterministic and Probabilistic Channel Conditions: Cases For Single Path and Multipath Routing ProtocolsAIRCC - IJCNCNo ratings yet
- Imran2016 PDFDocument5 pagesImran2016 PDFNader JalalNo ratings yet
- Information Dissemination Delay in Vehicle-to-Vehicle Communication Networks in A Traffic StreamDocument15 pagesInformation Dissemination Delay in Vehicle-to-Vehicle Communication Networks in A Traffic StreamEfrem LousadaNo ratings yet
- Research Article: Connectivity Analysis in Vehicular Networks With Slight Traffic InterferenceDocument12 pagesResearch Article: Connectivity Analysis in Vehicular Networks With Slight Traffic InterferenceRohit BudhwaniNo ratings yet
- Efficient Routing and Congestion Control in Multi-Flow MANET EnvironmentDocument7 pagesEfficient Routing and Congestion Control in Multi-Flow MANET EnvironmentInternational Journal of Engineering and TechniquesNo ratings yet
- 2016 Plos One YusorDocument24 pages2016 Plos One YusorMahamod IsmailNo ratings yet
- Congestion Control in Vehicular Ad Hoc Networks: Lars Wischhof and Hermann RohlingDocument6 pagesCongestion Control in Vehicular Ad Hoc Networks: Lars Wischhof and Hermann Rohlingnithya_narmiNo ratings yet
- IEEE Article - PolitisDocument9 pagesIEEE Article - PolitisShanju AmathNo ratings yet
- VANET Routing Protocols :implementation and Analysis Using NS3 and SUMODocument6 pagesVANET Routing Protocols :implementation and Analysis Using NS3 and SUMOVelumani sNo ratings yet
- Modeling and Dimensioning of Mobile Wireless Networks: From GSM to LTEFrom EverandModeling and Dimensioning of Mobile Wireless Networks: From GSM to LTENo ratings yet
- 6119-Article Text-17605-1-10-20211231Document6 pages6119-Article Text-17605-1-10-20211231Elda StefaNo ratings yet
- 5904 05SEP23 GE Whitepaper V2Document18 pages5904 05SEP23 GE Whitepaper V2Elda StefaNo ratings yet
- HarmonisationDocument27 pagesHarmonisationElda StefaNo ratings yet
- E-Competitions: Regulated Prices & Energy: An Overview of EU and National Case LawDocument17 pagesE-Competitions: Regulated Prices & Energy: An Overview of EU and National Case LawElda StefaNo ratings yet
- The Impact of Internet Protocol Television and Comparison With The Conventional TVDocument5 pagesThe Impact of Internet Protocol Television and Comparison With The Conventional TVElda StefaNo ratings yet
- EUREM Energy Saving 2018Document72 pagesEUREM Energy Saving 2018Elda StefaNo ratings yet
- EBRD Titull Certifikate 2017-2018Document1 pageEBRD Titull Certifikate 2017-2018Elda StefaNo ratings yet
- 7 Energy Sector Assessment Country Report (2010)Document6 pages7 Energy Sector Assessment Country Report (2010)Elda StefaNo ratings yet
- ENTSO-E Overview of Transmission Tariffs in Europe: Synthesis 2017Document67 pagesENTSO-E Overview of Transmission Tariffs in Europe: Synthesis 2017Elda StefaNo ratings yet
- Python Handwritten NotesDocument41 pagesPython Handwritten NotesVelammal .MNo ratings yet
- Backtesting CryptoDocument2 pagesBacktesting CryptoAwesome TreehouseNo ratings yet
- Ex Drive PDFDocument252 pagesEx Drive PDFmishka123No ratings yet
- Learning Task 1.4 How and Tell: Name: Guidelines: Grade and SectionDocument6 pagesLearning Task 1.4 How and Tell: Name: Guidelines: Grade and SectionAndrei Marie SamillanoNo ratings yet
- ContactsDocument5 pagesContacts7myzrm9s4sNo ratings yet
- Overview of Troubleshooting: Jason ZhangDocument49 pagesOverview of Troubleshooting: Jason ZhangMarco SánchezNo ratings yet
- Computer Engineering On-the-Job Training Portfolio: Week 1 OutputDocument3 pagesComputer Engineering On-the-Job Training Portfolio: Week 1 OutputJohn Paul Alcantara NidoyNo ratings yet
- Mod Menu Crash 2023 11 19-09 41 10Document2 pagesMod Menu Crash 2023 11 19-09 41 10РАВАНNo ratings yet
- Text SizeDocument4 pagesText SizeCălin CâmpianuNo ratings yet
- Lecture 2 Computational Methods For EngineersDocument14 pagesLecture 2 Computational Methods For EngineersJan Michael BatiloNo ratings yet
- The 1090Mhz Riddle: Junzi SunDocument49 pagesThe 1090Mhz Riddle: Junzi SunRiccardo RicciNo ratings yet
- Revision History: Schematics IndexDocument15 pagesRevision History: Schematics IndexDavid CarddNo ratings yet
- Joins in DbmsDocument19 pagesJoins in DbmsYashNo ratings yet
- Python Project Online Health Management System ReportDocument11 pagesPython Project Online Health Management System ReportD StudiosNo ratings yet
- DSE4510 MKII DSE4520 MKII Operator ManualDocument142 pagesDSE4510 MKII DSE4520 MKII Operator ManualbettendorffjNo ratings yet
- Logo Maker and Brand Kit Build Agreement - FinalDocument56 pagesLogo Maker and Brand Kit Build Agreement - Finalkawish farooqiNo ratings yet
- CoalescedDocument202 pagesCoalescedPau Costa FerrerNo ratings yet
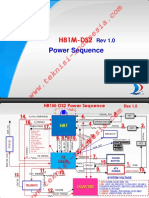
- H81M-DS2: Power SequenceDocument2 pagesH81M-DS2: Power SequenceHilario Serrano Flores100% (3)
- Greenberg - 1995 - Technology Transfer and CommercializationDocument6 pagesGreenberg - 1995 - Technology Transfer and CommercializationRaffi TchakerianNo ratings yet
- Next360 Brochure - Next Education India PVT LTDDocument20 pagesNext360 Brochure - Next Education India PVT LTDRuxhiNo ratings yet
- Test 1 - Matrices: PART A - 6 Questions, 1 Mark Each (6x1)Document2 pagesTest 1 - Matrices: PART A - 6 Questions, 1 Mark Each (6x1)sanand11No ratings yet
- AquamanDocument2 pagesAquamanGyungmi JuwonNo ratings yet
- ThinkCentre M800 SFF SpecDocument1 pageThinkCentre M800 SFF SpecsantosmarciobispoNo ratings yet
- Resume Examples by Real People - Network Engineer Resume Sample - KickresumeDocument1 pageResume Examples by Real People - Network Engineer Resume Sample - KickresumeAlisson LandaetaNo ratings yet
- ZPL40 ZPL50 ZPL70 LA-B181P r0.5 0218 r0.5 0325Document61 pagesZPL40 ZPL50 ZPL70 LA-B181P r0.5 0218 r0.5 0325Telefono TallerNo ratings yet
- ACCA SBL Unit of Innovation, Performance Excellence and Change Management 2021Document255 pagesACCA SBL Unit of Innovation, Performance Excellence and Change Management 2021Quensteen LimNo ratings yet
- Classification of JournalsDocument6 pagesClassification of JournalsRAJA NUR AMIRAH BINTI RAJA ABU BAKARNo ratings yet
- Affordable, Reliable, Adaptable Monitoring at The Bedside: Philips Goldway G30E/G40E Preconfigured Patient MonitorsDocument4 pagesAffordable, Reliable, Adaptable Monitoring at The Bedside: Philips Goldway G30E/G40E Preconfigured Patient MonitorsAntonius AgungNo ratings yet
- CS 112 MODULE Chapter 4-5 1st Sem 2021-2022Document40 pagesCS 112 MODULE Chapter 4-5 1st Sem 2021-2022Adrian GarciaNo ratings yet