Download as pdf or txt
You might also like
- Oracle Cloud Infrastructure Foundations PDFDocument121 pagesOracle Cloud Infrastructure Foundations PDFDiana Sanchez50% (2)
- Compact Mobility Unit R21Document8 pagesCompact Mobility Unit R21SfvvNo ratings yet
- Application Suite V.S. Best of Breed SaaSDocument4 pagesApplication Suite V.S. Best of Breed SaaSnofluff100% (3)
- DDD QuicklyDocument123 pagesDDD QuicklymarkokuszNo ratings yet
- Domain Driven Design QuicklyDocument96 pagesDomain Driven Design QuicklyFacundo AlvarezNo ratings yet
- UPA UX Visualizing Success Rick Starbuck 02.08Document4 pagesUPA UX Visualizing Success Rick Starbuck 02.08RickStarbuckNo ratings yet
- Transcription - How Fed Depts Unlock Value of LegacyDocument8 pagesTranscription - How Fed Depts Unlock Value of LegacyXhesika BezatiNo ratings yet
- UntitledDocument2 pagesUntitledTechX CorpNo ratings yet
- Lock Flag Master ThesisDocument8 pagesLock Flag Master Thesisjanaclarkbillings100% (2)
- A Short White Paper by Nikhil MalhotraDocument7 pagesA Short White Paper by Nikhil MalhotraSuresh RajputNo ratings yet
- MisDocument6 pagesMisPoonam ZawarNo ratings yet
- Application Access Over The Internet For Higher EducationDocument20 pagesApplication Access Over The Internet For Higher EducationSuresh VsNo ratings yet
- Azure Developer Guide EbookDocument39 pagesAzure Developer Guide EbookOctaqvio HerreraNo ratings yet
- Literature (Review) LasithaDocument16 pagesLiterature (Review) LasithaLasitha EkanayakeNo ratings yet
- ABSTRACTDocument4 pagesABSTRACTharshNo ratings yet
- CompTIA Cloud+ Certification Guide (Exam CV0-003): Everything you need to know to pass the CompTIA Cloud+ CV0-003 exam (English Edition)From EverandCompTIA Cloud+ Certification Guide (Exam CV0-003): Everything you need to know to pass the CompTIA Cloud+ CV0-003 exam (English Edition)No ratings yet
- Cloud Native AppDocument176 pagesCloud Native Appthe4powerNo ratings yet
- Thesis On Automobile ShowroomDocument6 pagesThesis On Automobile ShowroomWhatShouldIWriteMyPaperOnCanada100% (2)
- 2016ITDevConnectionsEventGuide FinalDocument24 pages2016ITDevConnectionsEventGuide FinalNitesh KohliNo ratings yet
- Jesse Levinson ThesisDocument8 pagesJesse Levinson ThesisHelpMeWithMyPaperCanada100% (1)
- Workday 10 Critical Requirements WhitepaperDocument7 pagesWorkday 10 Critical Requirements Whitepaperswaroop24x7No ratings yet
- Gartner Reprint Video PlatformDocument28 pagesGartner Reprint Video PlatformFranc DolencNo ratings yet
- Coursework OssDocument4 pagesCoursework Ossraxdouvcf100% (2)
- RFC Research PaperDocument8 pagesRFC Research Paperafednabte100% (1)
- Workday 10 Critical Requirements WhitepaperDocument8 pagesWorkday 10 Critical Requirements WhitepaperphvesNo ratings yet
- BEA Ent Intrgtn For SOA WPDocument16 pagesBEA Ent Intrgtn For SOA WPapi-3769899No ratings yet
- Web X WA - Solutions (Almost All)Document23 pagesWeb X WA - Solutions (Almost All)lala ronakNo ratings yet
- Enterprise Integration Patterns1Document3 pagesEnterprise Integration Patterns1ervivek100% (1)
- Migration To Dot NetDocument11 pagesMigration To Dot NetdanywongNo ratings yet
- SOP-ver 0.5Document2 pagesSOP-ver 0.5Zeeshan HaqueNo ratings yet
- Assignment # 01: Introduction To SeDocument3 pagesAssignment # 01: Introduction To SeMuhammad AsimNo ratings yet
- FWM UsagesDocument25 pagesFWM UsagesAnonymous UHyF8QLLINo ratings yet
- What's The Biggest Technology Challenge You Face in Adding (Or Boosting) Your Online And/or Streaming Video Elements?Document2 pagesWhat's The Biggest Technology Challenge You Face in Adding (Or Boosting) Your Online And/or Streaming Video Elements?praveen singhNo ratings yet
- Ops 8Document13 pagesOps 8Matthew RookeNo ratings yet
- Kelompok 3 - Pertanyaan Diskusi - Chapter 12 - Developing Business Information Technology Solutions B.ingDocument6 pagesKelompok 3 - Pertanyaan Diskusi - Chapter 12 - Developing Business Information Technology Solutions B.ingannisa maulidina100% (1)
- ¿Que Es La Comunicacion Digital?: What Are The Pieces To The Puzzle?Document5 pages¿Que Es La Comunicacion Digital?: What Are The Pieces To The Puzzle?esimezacatencoNo ratings yet
- Six Laws: of The NEWDocument17 pagesSix Laws: of The NEWrmvffrankenbergNo ratings yet
- Tech Bites: by Wilfred MworiaDocument12 pagesTech Bites: by Wilfred MworiaWill MworiaNo ratings yet
- DevSecOps in KubernetesDocument77 pagesDevSecOps in Kubernetesmarc MacaaroNo ratings yet
- CASE: Cisco SystemsDocument6 pagesCASE: Cisco SystemsNIHAL KUMARNo ratings yet
- Open Source Drives Digital Twin AdoptionDocument16 pagesOpen Source Drives Digital Twin Adoption13msrimefijazNo ratings yet
- Content Strategy Profile & ProposalDocument10 pagesContent Strategy Profile & ProposalAndrea AusmusNo ratings yet
- Micro Frontend Part TwoDocument9 pagesMicro Frontend Part TwoRahul GaurNo ratings yet
- Digital Business AssignmentDocument9 pagesDigital Business AssignmentDurgaa Devi VijayanNo ratings yet
- Software Procurement Best Practices - Rock WikiDocument4 pagesSoftware Procurement Best Practices - Rock WikiJoão DobbinNo ratings yet
- Generative AI Will Transform Virtual MeetingsDocument9 pagesGenerative AI Will Transform Virtual Meetingsdjhx5vv2s8No ratings yet
- Bus SystemDocument54 pagesBus SystemPrints BindingsNo ratings yet
- Best of Both Worlds - How Virtualization Will Impact The ADC Market - JavalobbyDocument3 pagesBest of Both Worlds - How Virtualization Will Impact The ADC Market - JavalobbyAnonymous xLNQ2czNo ratings yet
- 00 Unit 1 Digital Trans Trends Worksheet Class 1Document6 pages00 Unit 1 Digital Trans Trends Worksheet Class 1brijufijuNo ratings yet
- Net Vs JavaDocument4 pagesNet Vs Javanitehawk24122789No ratings yet
- Module 7Document29 pagesModule 7marsh mallowNo ratings yet
- The Complete Reference To Professional SOA With Visual Studio 2005 Dot NET 3.0Document789 pagesThe Complete Reference To Professional SOA With Visual Studio 2005 Dot NET 3.0varunkaushish100% (19)
- Asset6 Looking Ahead Cloud Report From 2015Document2 pagesAsset6 Looking Ahead Cloud Report From 2015chawla_sonamNo ratings yet
- C FaqDocument226 pagesC Faqapi-3747983100% (1)
- Web vs. Standalone ApplicationDocument40 pagesWeb vs. Standalone ApplicationgrenzyaNo ratings yet
- Object Database Vs - Object-Relational DatabasesDocument21 pagesObject Database Vs - Object-Relational DatabasesTarun VijwaniNo ratings yet
- A VC's View of Web 2.0Document8 pagesA VC's View of Web 2.0vgopikNo ratings yet
- Perspectives On Web Services - Applying SOAP, WSDL and UDDI To Real-World Projects (PDFDrive)Document673 pagesPerspectives On Web Services - Applying SOAP, WSDL and UDDI To Real-World Projects (PDFDrive)Jesus Jair Alarcón ArcaNo ratings yet
- Architectures You Ve Always Wondered About EMagDocument37 pagesArchitectures You Ve Always Wondered About EMagMichael LiangNo ratings yet
- Full Ebook of Federated Ai For Real World Business Scenarios 1St Edition Dinesh C Verma Online PDF All ChapterDocument69 pagesFull Ebook of Federated Ai For Real World Business Scenarios 1St Edition Dinesh C Verma Online PDF All Chapterrocannehindi100% (5)
- A14001072Document12 pagesA14001072泰雄No ratings yet
- MP Ist 042 11Document8 pagesMP Ist 042 11泰雄No ratings yet
- Swift RMBDocument10 pagesSwift RMB泰雄No ratings yet
- Windows Automotive Data SheetDocument2 pagesWindows Automotive Data Sheet泰雄No ratings yet
- First Day (December 17, 2018) (Monday) : Formatted: Top: (Custom, Accent 5, 30.8 PT LineDocument6 pagesFirst Day (December 17, 2018) (Monday) : Formatted: Top: (Custom, Accent 5, 30.8 PT LineEvan LawrenceNo ratings yet
- 6455 DSK Quick Start GuideDocument4 pages6455 DSK Quick Start GuideErik RuizNo ratings yet
- Computer Class 8Document2 pagesComputer Class 8Huzaifa KhanNo ratings yet
- C++ Interview Questions and Answers - TypesDocument7 pagesC++ Interview Questions and Answers - TypesAmritaRupiniNo ratings yet
- Activating Licenses Offline Local Server Brochure 0Document19 pagesActivating Licenses Offline Local Server Brochure 0Riki BebiNo ratings yet
- Cara Reset Canon MP287 P07: Download DisiniDocument4 pagesCara Reset Canon MP287 P07: Download DisiniMarwan DahaNo ratings yet
- Hisagent UserDocument432 pagesHisagent Userrobin webNo ratings yet
- TECSPG-3001 Cisco LiveDocument405 pagesTECSPG-3001 Cisco LiveShiva Kris100% (1)
- Rufus - Create Bootable USB Drives The Easy WayDocument6 pagesRufus - Create Bootable USB Drives The Easy WayÑiechztQS20% (5)
- Get Started With Windows Server 2016 PDFDocument183 pagesGet Started With Windows Server 2016 PDFAlexandrescu MarianNo ratings yet
- Material AdicionalDocument126 pagesMaterial AdicionalGenaro Moreno BeltranNo ratings yet
- Recommendations For Migrations Using Microsoft SQL ServerDocument5 pagesRecommendations For Migrations Using Microsoft SQL ServerDushyant TomarNo ratings yet
- How To Implement Iconic Buttons Having Different Images in A Multirecord-Block ?Document9 pagesHow To Implement Iconic Buttons Having Different Images in A Multirecord-Block ?MJChidambaramNo ratings yet
- Kernel Log StreamDocument118 pagesKernel Log StreamAnonymous cjq5eViZNo ratings yet
- Microrca: Root Cause Localization of Performance Issues in MicroservicesDocument10 pagesMicrorca: Root Cause Localization of Performance Issues in MicroservicesyNo ratings yet
- Fortimanager v7.0.1 Upgrade GuideDocument28 pagesFortimanager v7.0.1 Upgrade GuideDaulet RabayevNo ratings yet
- CDU ReleaseNotes PDFDocument32 pagesCDU ReleaseNotes PDFGowri ShankarNo ratings yet
- Hahahaha Python Questions - Variable NamesDocument11 pagesHahahaha Python Questions - Variable NamesQuinone QuentinNo ratings yet
- Features: PLCC-28Document35 pagesFeatures: PLCC-28肖磊No ratings yet
- Lastexception 63747124539Document2 pagesLastexception 63747124539Kompletna DeprechaNo ratings yet
- Apache Reverse ProxyDocument14 pagesApache Reverse ProxybripradNo ratings yet
- BES-7242W: Specifications: Web Management FeatureDocument1 pageBES-7242W: Specifications: Web Management FeatureEdu EdyNo ratings yet
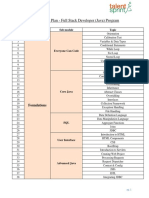
- Delivery Plan - Full Stack Developer (Java) Program: FoundationsDocument4 pagesDelivery Plan - Full Stack Developer (Java) Program: FoundationsAliaNo ratings yet
- Sybase Replication Server: System Tables DiagramDocument1 pageSybase Replication Server: System Tables DiagramyuanruiNo ratings yet
- Iv Unit Data Flow, Behavioral Modeling: EC258 Digital System Design Using VHDLDocument17 pagesIv Unit Data Flow, Behavioral Modeling: EC258 Digital System Design Using VHDLventooesteNo ratings yet
- China Tech Hardware Manufacturing Map 2012 PDFDocument2 pagesChina Tech Hardware Manufacturing Map 2012 PDF傅廣承No ratings yet
- Install The Cpu, Heat Sink, FanDocument18 pagesInstall The Cpu, Heat Sink, FanMegalaiyani ElangovanNo ratings yet
- Ic Counterfeiting 1149.1 2013 PUF Electronic Chip IdentificationDocument17 pagesIc Counterfeiting 1149.1 2013 PUF Electronic Chip IdentificationEmilian IchimNo ratings yet
- 8085Document15 pages8085kannanNo ratings yet