Download as pdf or txt
You might also like
- D&D 5e - DMs Guild - Strixhaven A Syllabus of SorceryDocument54 pagesD&D 5e - DMs Guild - Strixhaven A Syllabus of SorceryMauroMenin89% (9)
- A Proposal To Set Up A Digital Library A PDFDocument7 pagesA Proposal To Set Up A Digital Library A PDFamenu_bizunehNo ratings yet
- Transference Interpretation in The Psychotherapy of Borderline Patients: A High-Risk, High-Gain PhenomenonDocument12 pagesTransference Interpretation in The Psychotherapy of Borderline Patients: A High-Risk, High-Gain PhenomenonPaz LanchoNo ratings yet
- Tools and Techniques of Assessment in EducationDocument8 pagesTools and Techniques of Assessment in EducationSwami Gurunand100% (1)
- Human Activity Recognition Process Using 3-D Posture DataDocument12 pagesHuman Activity Recognition Process Using 3-D Posture DataJojo SeseNo ratings yet
- Ullah 2019Document6 pagesUllah 2019Dinar TASNo ratings yet
- Viola Jone's AlgorithmDocument25 pagesViola Jone's AlgorithmAkhil AhujaNo ratings yet
- 4 2 5 NeuralnetworkDocument20 pages4 2 5 NeuralnetworkMouhamed MouhNo ratings yet
- Biomav: Bio-Inspired Intelligence For Autonomous Flight: BstractDocument8 pagesBiomav: Bio-Inspired Intelligence For Autonomous Flight: BstractVincent SliekerNo ratings yet
- Non-Linear Moving Target Tracking: A Particle Filter ApproachDocument7 pagesNon-Linear Moving Target Tracking: A Particle Filter ApproachInternational Journal of Computer and Communication System EngineeringNo ratings yet
- Real-Time Tracking of Moving Objects With An Active Camera: K. Daniilidis, C. Krauss, M. Hansen and G. SommerDocument18 pagesReal-Time Tracking of Moving Objects With An Active Camera: K. Daniilidis, C. Krauss, M. Hansen and G. SommerJonathan Neira GonzalezNo ratings yet
- Human Activity Recognition From Accelerometer Data Using A Wearable DeviceDocument9 pagesHuman Activity Recognition From Accelerometer Data Using A Wearable DeviceCandra RitzNo ratings yet
- Human Fall Detection Using Optical Flow Farne BackDocument15 pagesHuman Fall Detection Using Optical Flow Farne Backkandulaanusha20No ratings yet
- Violajones Ijcv PDFDocument25 pagesViolajones Ijcv PDFFelice ChewNo ratings yet
- Ijct V3i2p5Document9 pagesIjct V3i2p5IjctJournalsNo ratings yet
- Articulated Body Motion Capture by Stochastic SearchDocument21 pagesArticulated Body Motion Capture by Stochastic SearchCyrille LamasséNo ratings yet
- 2011-Intro-Md-Motion Detection and Analysis With Four Different DetectorsDocument5 pages2011-Intro-Md-Motion Detection and Analysis With Four Different DetectorsM FarhanNo ratings yet
- Generative DesignDocument4 pagesGenerative DesignJoeser AlvarezNo ratings yet
- Council For Innovative Research: Efficient Motion Detection Algorithm in Video SequencesDocument6 pagesCouncil For Innovative Research: Efficient Motion Detection Algorithm in Video SequencesmelakuNo ratings yet
- Motion Detection and Tracking of Multiple Objects For Intelligent SurveillanceDocument7 pagesMotion Detection and Tracking of Multiple Objects For Intelligent Surveillancesemselvan794694No ratings yet
- Real-Time Analysis of AthletesDocument11 pagesReal-Time Analysis of AthletesMaxwell Nunes do CarmoNo ratings yet
- 8 Rapid Object Detection Using A Boosted Cascade of Simple FeaturesDocument8 pages8 Rapid Object Detection Using A Boosted Cascade of Simple FeaturesTharakaNo ratings yet
- Human Activity Recognition: B.Tech Project ReportDocument11 pagesHuman Activity Recognition: B.Tech Project ReportHunter IxNo ratings yet
- Monocular Human Motion Tracking by Using DE-MC Particle FilterDocument14 pagesMonocular Human Motion Tracking by Using DE-MC Particle FilterDavid Augusto RibeiroNo ratings yet
- Convolutional Neural Networks For Human Activity Recognition Using Mobile SensorsDocument18 pagesConvolutional Neural Networks For Human Activity Recognition Using Mobile SensorsAlan BensonNo ratings yet
- Visual Servoing IEEE PaperDocument20 pagesVisual Servoing IEEE PaperPulkit ShahNo ratings yet
- Procesos InglesDocument5 pagesProcesos InglesMaye CastroNo ratings yet
- Detection of Human Motion: Adopting Machine and Deep LearningDocument8 pagesDetection of Human Motion: Adopting Machine and Deep LearningPavithra iyerNo ratings yet
- Optical Flow: Exploring Dynamic Visual Patterns in Computer VisionFrom EverandOptical Flow: Exploring Dynamic Visual Patterns in Computer VisionNo ratings yet
- Human Body Orientation Estimation Using Convolutional Neural NetworkDocument5 pagesHuman Body Orientation Estimation Using Convolutional Neural Networkbukhtawar zamirNo ratings yet
- Research Proposal Robotics NabeelDocument9 pagesResearch Proposal Robotics Nabeelyasirmehmood76No ratings yet
- Detecting Pedestrians Using Patterns of Motion and AppearanceDocument8 pagesDetecting Pedestrians Using Patterns of Motion and Appearancemuhammad Ehsan UllahNo ratings yet
- A Tutorial On Visual Servo ControlDocument20 pagesA Tutorial On Visual Servo ControlAlberto NicolottiNo ratings yet
- Motion Object Detector With Higher Detection LevelsDocument4 pagesMotion Object Detector With Higher Detection Levelssurendiran123No ratings yet
- Movement Prediction From Real-World Images Using A Liquid State MachineDocument12 pagesMovement Prediction From Real-World Images Using A Liquid State MachinePhuong anNo ratings yet
- Torsten ReilDocument10 pagesTorsten ReilFajar HariadiNo ratings yet
- Study On Self Organizing Approach For Moving Object Detection and Tracking For Visual SurveillanceDocument3 pagesStudy On Self Organizing Approach For Moving Object Detection and Tracking For Visual SurveillanceInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- An Insight Into The Algorithms On Real-Time People Tracking and Counting SystemDocument6 pagesAn Insight Into The Algorithms On Real-Time People Tracking and Counting SystemRandy ArtNo ratings yet
- "Icub, Clean The Table!" A Robot Learning From Demonstration Approach Using Deep Neural NetworksDocument7 pages"Icub, Clean The Table!" A Robot Learning From Demonstration Approach Using Deep Neural NetworksZûlhafizZûlkifliNo ratings yet
- Moving Object DetectionDocument14 pagesMoving Object DetectionAmith Ram Reddy100% (1)
- A Behavior-Based Architecture For Unmanned Aerial: VehiclesDocument7 pagesA Behavior-Based Architecture For Unmanned Aerial: VehiclesJoao PedroNo ratings yet
- Review of Related Literature CathDocument10 pagesReview of Related Literature CathCathlyn AbionNo ratings yet
- Kalman Filter Based Multiple Object Tracking System: Anita Kulkarni & Elizabeth RaniDocument6 pagesKalman Filter Based Multiple Object Tracking System: Anita Kulkarni & Elizabeth RaniTJPRC PublicationsNo ratings yet
- Control System With Head MovementsDocument6 pagesControl System With Head MovementsKelappan NairNo ratings yet
- Virtual Instrumentation For Visualization of Vibration and Its ControlDocument5 pagesVirtual Instrumentation For Visualization of Vibration and Its ControltripathijohnNo ratings yet
- Vehicl ManagementDocument12 pagesVehicl ManagementkaveeshaNo ratings yet
- Animation and Performance Capture Using Digitized Models (Edilson de Aguiar (Auth.) ) (Z-Library)Document172 pagesAnimation and Performance Capture Using Digitized Models (Edilson de Aguiar (Auth.) ) (Z-Library)Fresy NugrohoNo ratings yet
- VeewDocument8 pagesVeewMuhammadRusdinNo ratings yet
- p2 PDFDocument14 pagesp2 PDFAhmad UsmanNo ratings yet
- Active PerceptionDocument35 pagesActive PerceptionShirin BudhwaniNo ratings yet
- VisualizationandanimationDocument6 pagesVisualizationandanimationapi-3805241No ratings yet
- Sensors: Deep Convolutional and LSTM Recurrent Neural Networks For Multimodal Wearable Activity RecognitionDocument25 pagesSensors: Deep Convolutional and LSTM Recurrent Neural Networks For Multimodal Wearable Activity RecognitionKailash ANo ratings yet
- Review - Edgar Omar Ovalle OzunaDocument8 pagesReview - Edgar Omar Ovalle OzunaEdgar OvalleNo ratings yet
- Hardware Implementation of A Neural-Network Recognition Module For Visual Servoing in A Mobile RobotDocument7 pagesHardware Implementation of A Neural-Network Recognition Module For Visual Servoing in A Mobile RobotHarikrishnan Manakara RadhakrishnanNo ratings yet
- Haen - 2012 - J. - Phys. - Conf. - Ser. - 396 - 052038Document11 pagesHaen - 2012 - J. - Phys. - Conf. - Ser. - 396 - 052038praveen gNo ratings yet
- Project 1Document53 pagesProject 1suyash jainNo ratings yet
- Human Activity Detection and Recognition Algorithm From Video Surveillances.Document5 pagesHuman Activity Detection and Recognition Algorithm From Video Surveillances.editor_ijtelNo ratings yet
- Flow Measurement Tool For Crowd Management SystemsDocument3 pagesFlow Measurement Tool For Crowd Management SystemssecretdefenseNo ratings yet
- OBCAR: An Algorithm For Object Based Composite Activities Recognition in Smart EnvironmentsDocument6 pagesOBCAR: An Algorithm For Object Based Composite Activities Recognition in Smart EnvironmentsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Event-Based Moving Object Detection and TrackingDocument8 pagesEvent-Based Moving Object Detection and TrackingPhoenix GamingNo ratings yet
- Exploring Representation Learning With CNNsDocument8 pagesExploring Representation Learning With CNNsItem SongsNo ratings yet
- Visual Sensor Network: Exploring the Power of Visual Sensor Networks in Computer VisionFrom EverandVisual Sensor Network: Exploring the Power of Visual Sensor Networks in Computer VisionNo ratings yet
- Tracking with Particle Filter for High-dimensional Observation and State SpacesFrom EverandTracking with Particle Filter for High-dimensional Observation and State SpacesNo ratings yet
- College SavingsDocument2 pagesCollege SavingsvietrossNo ratings yet
- Cebu Youth Mental Health Conference-FridayDocument2 pagesCebu Youth Mental Health Conference-FridayDyanne BautistaNo ratings yet
- Social Science 100 Questionnaire UNITIDocument3 pagesSocial Science 100 Questionnaire UNITIAishah BelaNo ratings yet
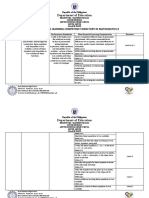
- Math 8 Contextualized Learning Competency DirectoryDocument23 pagesMath 8 Contextualized Learning Competency DirectoryMONA LEE TONACAONo ratings yet
- Grading Sheet - GRADE-7-10-TLEDocument21 pagesGrading Sheet - GRADE-7-10-TLEAyn RealosaNo ratings yet
- Ebook PDF Chez Nous Branche Sur Le Monde Francophone Third Canadian PDFDocument41 pagesEbook PDF Chez Nous Branche Sur Le Monde Francophone Third Canadian PDFdiana.dobson700100% (51)
- Calculate D7 For The Following Data. Profit (In Crores )Document6 pagesCalculate D7 For The Following Data. Profit (In Crores )David Oba OlayiwolaNo ratings yet
- Iso 9000 - Quality HandbookDocument331 pagesIso 9000 - Quality HandbookJavier Pozo Santana92% (13)
- Focus On Mental Health BookletDocument133 pagesFocus On Mental Health Bookletapi-455513786100% (1)
- Bachelor of Engineering Study Plan / Application For CandidacyDocument4 pagesBachelor of Engineering Study Plan / Application For CandidacysahilNo ratings yet
- Project Charter Template.2019Document10 pagesProject Charter Template.2019沈悦双No ratings yet
- Geography-Unit-Plan 3Document16 pagesGeography-Unit-Plan 3api-388943110No ratings yet
- ICSSR Sponsored Ten Days Research Methodology Course For M.Phil - Ph.D. - PDF ScholarsDocument8 pagesICSSR Sponsored Ten Days Research Methodology Course For M.Phil - Ph.D. - PDF Scholarsshalini vermaNo ratings yet
- Four Types of Business Letters: Based Off of Kolin Chapter 6 For Business Writing by Dr. Jennifer L. BowieDocument12 pagesFour Types of Business Letters: Based Off of Kolin Chapter 6 For Business Writing by Dr. Jennifer L. BowieGhazanfar AliNo ratings yet
- Micro-Bit Lesson 2 PlanDocument4 pagesMicro-Bit Lesson 2 Planapi-380052821No ratings yet
- Jurnal Asriani, Salma, & Jafriati (2022)Document8 pagesJurnal Asriani, Salma, & Jafriati (2022)andraNo ratings yet
- Careers After 10th & 12thDocument662 pagesCareers After 10th & 12thshvamvaish0983% (6)
- Applying For Visitor Visa (Temporary Resident Visa - IMM 5256)Document20 pagesApplying For Visitor Visa (Temporary Resident Visa - IMM 5256)Metha DawnNo ratings yet
- Dwnload Full Social Psychology 10th Edition Kassin Test Bank PDFDocument35 pagesDwnload Full Social Psychology 10th Edition Kassin Test Bank PDFrink.outsell.sqwdpw100% (15)
- ResumeDocument3 pagesResumeapi-254759511No ratings yet
- Panitia Bahasa Melayu: Carta Gantt / Jadual Bertindak Pelaksanaan Program / Aktiviti KurikulumDocument6 pagesPanitia Bahasa Melayu: Carta Gantt / Jadual Bertindak Pelaksanaan Program / Aktiviti KurikulumKhairi RashidNo ratings yet
- DLP DIASS Week 1 - Applied Social SciencesDocument7 pagesDLP DIASS Week 1 - Applied Social SciencesEdna Dalanon DahanNo ratings yet
- Calendar For Year 2021 (Tanzania) : January February MarchDocument2 pagesCalendar For Year 2021 (Tanzania) : January February MarchlumuruNo ratings yet
- Sample Grant ProposalDocument16 pagesSample Grant ProposalSaundra100% (1)
- Phy. Notes Copy NedDocument84 pagesPhy. Notes Copy NedShoon Lae Cho [Mera]No ratings yet
- Formal Lab Report Rubric Grades 9-12 Science Content No AbstractDocument3 pagesFormal Lab Report Rubric Grades 9-12 Science Content No Abstractapi-223847943No ratings yet