
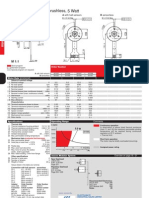
Vrdm36x GB
Vrdm36x GB
You might also like
- SAP Security Baseline Template V1.9Document149 pagesSAP Security Baseline Template V1.9Pasquale Vinci75% (4)
- 13use Bank Reconciliation ToolsDocument9 pages13use Bank Reconciliation ToolsJinky BulahanNo ratings yet
- Fast Path To B2C Commerce Developer Certification - Module 6 - OCAPI and Service FrameworkDocument22 pagesFast Path To B2C Commerce Developer Certification - Module 6 - OCAPI and Service FrameworkHiep LeNo ratings yet
- Website Design QuestionnaireDocument20 pagesWebsite Design QuestionnaireGous Basha Shaik100% (1)
- VRDM39x ManualDocument15 pagesVRDM39x ManualTamas RaduNo ratings yet
- Melservo Jet Series Rotary Servo MotorDocument8 pagesMelservo Jet Series Rotary Servo MotorvermadelipNo ratings yet
- DRE CAT Stepper Motors CatalogueDocument4 pagesDRE CAT Stepper Motors CatalogueSendi Dika PrasendaNo ratings yet
- EC 20 Flat 20 MM, Brushless, 5 Watt: Part NumbersDocument1 pageEC 20 Flat 20 MM, Brushless, 5 Watt: Part Numbersivanlawms6745No ratings yet
- Ball - Screw - Calculations - As Per THK and PmiDocument5 pagesBall - Screw - Calculations - As Per THK and PmiDharmeshPatelNo ratings yet
- HNC AUTOMATION HSM Series AC 220V Servo Motor CatalogDocument6 pagesHNC AUTOMATION HSM Series AC 220V Servo Motor CatalogTodi FindraNo ratings yet
- RE.0444N - Normal: Direct Current Tachometer GeneratorDocument3 pagesRE.0444N - Normal: Direct Current Tachometer GeneratorJUANJAUNNo ratings yet
- F2140 Eng DatasheetDocument4 pagesF2140 Eng Datasheettngyew leeNo ratings yet
- DCM Series Brushed Servo Motors: Electrical SpecificationsDocument3 pagesDCM Series Brushed Servo Motors: Electrical SpecificationsNguyen Van ThaiNo ratings yet
- Catalog Motor EC90Flat 323772Document1 pageCatalog Motor EC90Flat 323772Lucas SuplinoNo ratings yet
- M48x50 24V EngDocument2 pagesM48x50 24V EngCristianNo ratings yet
- C4-16X Electrical SpecificationDocument1 pageC4-16X Electrical SpecificationNguyen Van ThaiNo ratings yet
- C4-16X Electrical SpecificationDocument1 pageC4-16X Electrical SpecificationNguyen Van ThaiNo ratings yet
- 16n28 Brushed DC Motor DatasheetDocument1 page16n28 Brushed DC Motor DatasheetPaweł DoboszNo ratings yet
- BLDC Motor 6 MM: ECX SPEED 6 M BrushlessDocument1 pageBLDC Motor 6 MM: ECX SPEED 6 M Brushlesskishan kharelNo ratings yet
- Mot-An-S en 20160403Document9 pagesMot-An-S en 20160403DARIONo ratings yet
- Maxon EC20 Flat 5wattDocument1 pageMaxon EC20 Flat 5wattElectromateNo ratings yet
- Maxon EC-Max40 70wattDocument1 pageMaxon EC-Max40 70wattElectromateNo ratings yet
- 17 en 170 Lstage DatasheetDocument1 page17 en 170 Lstage DatasheetSana SyedNo ratings yet
- Maxon RE25 Precious Metal Brushes 10wattDocument1 pageMaxon RE25 Precious Metal Brushes 10wattElectromateNo ratings yet
- G493 Series Servo MotorsDocument4 pagesG493 Series Servo MotorsIain JubbNo ratings yet
- ZWS90Document2 pagesZWS90pawelprusNo ratings yet
- Beam ReportDocument64 pagesBeam ReportOkechukwu BenjaminNo ratings yet
- Maxon EC6 1.2wattDocument1 pageMaxon EC6 1.2wattElectromateNo ratings yet
- RE50Document1 pageRE50Yhony Gamarra VargasNo ratings yet
- Motores PDFDocument1 pageMotores PDFJorge Alejandro Barrutia BorbollaNo ratings yet
- IT6468 0911gbDocument24 pagesIT6468 0911gbmarcos lemosNo ratings yet
- DatasheetDocument1 pageDatasheetzukijaNo ratings yet
- S7L1D-G4 Wdg.312 - Technical Data SheetDocument9 pagesS7L1D-G4 Wdg.312 - Technical Data Sheet3efoo100% (1)
- MT30R4ExtractDocument12 pagesMT30R4ExtractalejandroNo ratings yet
- En 21 300Document1 pageEn 21 300Oskar Askarbek PazylbekovNo ratings yet
- Maxon EC20 Flat 3wattDocument1 pageMaxon EC20 Flat 3wattElectromateNo ratings yet
- Maxon Ec45 136210Document1 pageMaxon Ec45 136210compimagmaticNo ratings yet
- 16 275 enDocument1 page16 275 enmawadNo ratings yet
- Maxon EC-Max16 5wattDocument1 pageMaxon EC-Max16 5wattElectromateNo ratings yet
- Mot-Ec - enDocument8 pagesMot-Ec - enYERKO ANDRÉS GONZÁLEZNo ratings yet
- Maxon Motor Amax26 SpecDocument1 pageMaxon Motor Amax26 SpecjangetialNo ratings yet
- Maxon EC45 Flat 30wattDocument1 pageMaxon EC45 Flat 30wattElectromateNo ratings yet
- Motores Maxon 2017Document1 pageMotores Maxon 2017--No ratings yet
- 180 Series Servo Motors: Dimension: Unit MMDocument1 page180 Series Servo Motors: Dimension: Unit MMMax QuintanillaNo ratings yet
- En 21 250Document1 pageEn 21 250compimagmaticNo ratings yet
- En 21 171Document1 pageEn 21 171pham tamNo ratings yet
- 2KJ3514-3KN38-9AR1-Z B33+C46+D11+K01+K06+L02+L75+M10+M59+N1S+P92 Datasheet enDocument2 pages2KJ3514-3KN38-9AR1-Z B33+C46+D11+K01+K06+L02+L75+M10+M59+N1S+P92 Datasheet encaukhoeoNo ratings yet
- Maxon EC22 20watt Integrated ElectronicsDocument2 pagesMaxon EC22 20watt Integrated ElectronicsElectromateNo ratings yet
- DC Motor With Permanent Magnet: PG 4520 PG 4520 PG 4525 PG 4525Document1 pageDC Motor With Permanent Magnet: PG 4520 PG 4520 PG 4525 PG 4525NewsUPdateNo ratings yet
- ALBRY10021H00AA InstDocument10 pagesALBRY10021H00AA InstMarcus TornovskyNo ratings yet
- Precious Metal Commutation Ø22Mm 8.8 MNM: Electrical Data 216P 216E 213E 210E 208E 105Document1 pagePrecious Metal Commutation Ø22Mm 8.8 MNM: Electrical Data 216P 216E 213E 210E 208E 105johnNo ratings yet
- Motor Maxon 323772Document1 pageMotor Maxon 323772Henry Daniel VerdugoNo ratings yet
- S6L1D-C4 Wdg.311 - 312 - Technical Data SheetDocument8 pagesS6L1D-C4 Wdg.311 - 312 - Technical Data Sheetsarahalawa222No ratings yet
- 81 PDFDocument1 page81 PDFRatanieriNo ratings yet
- 30 MM, Graphite Brushes, 60 Watt: Order NumberDocument1 page30 MM, Graphite Brushes, 60 Watt: Order NumberRatanieriNo ratings yet
- Technical Data Sheet For Avk-Alternators: Unsaturated Saturated Unsaturated SaturatedDocument9 pagesTechnical Data Sheet For Avk-Alternators: Unsaturated Saturated Unsaturated SaturatedEndang SunartiNo ratings yet
- ROQ 425 Absolute Rotary Encoders With TTL or HTL SignalsDocument9 pagesROQ 425 Absolute Rotary Encoders With TTL or HTL SignalsMr.T FYINo ratings yet
- The Design of Modern Microwave Oscillators for Wireless Applications: Theory and OptimizationFrom EverandThe Design of Modern Microwave Oscillators for Wireless Applications: Theory and OptimizationNo ratings yet
- Flexible Power Transmission: The HVDC OptionsFrom EverandFlexible Power Transmission: The HVDC OptionsRating: 5 out of 5 stars5/5 (1)
- Signal Integrity and Radiated Emission of High-Speed Digital SystemsFrom EverandSignal Integrity and Radiated Emission of High-Speed Digital SystemsNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- SEIN SAC CatalogugDocument75 pagesSEIN SAC CatalogugRahmanu AribowoNo ratings yet
- Canon Ir3100c - Service ManualDocument1,069 pagesCanon Ir3100c - Service ManualSMART REFILL67% (3)
- Papacad: Light Gantry Crane 500 KGDocument1 pagePapacad: Light Gantry Crane 500 KGminh hiếu nguyễnNo ratings yet
- Seminar Topic: The Use of Computer For Automobile DesignDocument17 pagesSeminar Topic: The Use of Computer For Automobile DesignAjewole Eben TopeNo ratings yet
- PPTDocument18 pagesPPTJyant KhobragadeNo ratings yet
- Validating The MD5 Checksum of A FileDocument4 pagesValidating The MD5 Checksum of A FileSandra GilbertNo ratings yet
- Datasheet Rtu Scada Complete SolutionDocument2 pagesDatasheet Rtu Scada Complete Solutionsoltani aliNo ratings yet
- UI UX Designer BootcampDocument21 pagesUI UX Designer BootcampSam AryanNo ratings yet
- Learning Continuity Plan During Covid-19 S.Y. 2020-2021: Department of EducationDocument17 pagesLearning Continuity Plan During Covid-19 S.Y. 2020-2021: Department of EducationMark-Christopher Roi Pelobello MontemayorNo ratings yet
- Flip-Flops: Basic ConceptsDocument32 pagesFlip-Flops: Basic ConceptsМилан ЛукићNo ratings yet
- Pressure Sensors QBE2002-P.. - enDocument6 pagesPressure Sensors QBE2002-P.. - entarek.amirecheNo ratings yet
- GLADIS User Guide May2023Document7 pagesGLADIS User Guide May2023D ardikaNo ratings yet
- Ficha Tecnica Motor Perkins 403d-15gDocument4 pagesFicha Tecnica Motor Perkins 403d-15gChristian OcampoNo ratings yet
- 22dj0012 Pow - BuildingDocument106 pages22dj0012 Pow - BuildingLESTER PAOLO APINONo ratings yet
- Setting Up VPN Connection Between Two Scalance SCDocument32 pagesSetting Up VPN Connection Between Two Scalance SCOleksandr HusievNo ratings yet
- Demystifying The TVSSDocument4 pagesDemystifying The TVSSmentongNo ratings yet
- Welcome To The Course On Industrial Automation and ControlDocument25 pagesWelcome To The Course On Industrial Automation and ControlvattuNo ratings yet
- Mediaandinformationliteracymil Visualinformationandmediapart3 170910121157Document33 pagesMediaandinformationliteracymil Visualinformationandmediapart3 170910121157Anonymous xagGSIdNo ratings yet
- Automatic Speed BreakerDocument6 pagesAutomatic Speed BreakerIJRASETPublicationsNo ratings yet
- Clutch Cylinder With PWM Valves and Sensor PDFDocument2 pagesClutch Cylinder With PWM Valves and Sensor PDFSherzad Chem100% (5)
- TAB (Technology Applications in Business) 2021-2022: Digital Is A Lifestyle Not A TechnologyDocument15 pagesTAB (Technology Applications in Business) 2021-2022: Digital Is A Lifestyle Not A TechnologyMOHAMMED AMIN SHAIKHNo ratings yet
- GF Pre Acp Eng PDFDocument626 pagesGF Pre Acp Eng PDFMessias De Oliveira SantosNo ratings yet
- Spare Parts List (59700670) Spare Parts List CV 30/1 - CV 38/1Document18 pagesSpare Parts List (59700670) Spare Parts List CV 30/1 - CV 38/1warick mNo ratings yet
- What Is The Difference Between IPE and HEADocument5 pagesWhat Is The Difference Between IPE and HEABayar DiyarNo ratings yet
- Signals and SystemsDocument18 pagesSignals and SystemsWaqas Kiani100% (1)
- Roland A880 Owner ManualDocument9 pagesRoland A880 Owner ManualSteven ClementsNo ratings yet























































































Download as pdf or txt
You might also like
- SAP Security Baseline Template V1.9Document149 pagesSAP Security Baseline Template V1.9Pasquale Vinci75% (4)
- 13use Bank Reconciliation ToolsDocument9 pages13use Bank Reconciliation ToolsJinky BulahanNo ratings yet
- Fast Path To B2C Commerce Developer Certification - Module 6 - OCAPI and Service FrameworkDocument22 pagesFast Path To B2C Commerce Developer Certification - Module 6 - OCAPI and Service FrameworkHiep LeNo ratings yet
- Website Design QuestionnaireDocument20 pagesWebsite Design QuestionnaireGous Basha Shaik100% (1)
- VRDM39x ManualDocument15 pagesVRDM39x ManualTamas RaduNo ratings yet
- Melservo Jet Series Rotary Servo MotorDocument8 pagesMelservo Jet Series Rotary Servo MotorvermadelipNo ratings yet
- DRE CAT Stepper Motors CatalogueDocument4 pagesDRE CAT Stepper Motors CatalogueSendi Dika PrasendaNo ratings yet
- EC 20 Flat 20 MM, Brushless, 5 Watt: Part NumbersDocument1 pageEC 20 Flat 20 MM, Brushless, 5 Watt: Part Numbersivanlawms6745No ratings yet
- Ball - Screw - Calculations - As Per THK and PmiDocument5 pagesBall - Screw - Calculations - As Per THK and PmiDharmeshPatelNo ratings yet
- HNC AUTOMATION HSM Series AC 220V Servo Motor CatalogDocument6 pagesHNC AUTOMATION HSM Series AC 220V Servo Motor CatalogTodi FindraNo ratings yet
- RE.0444N - Normal: Direct Current Tachometer GeneratorDocument3 pagesRE.0444N - Normal: Direct Current Tachometer GeneratorJUANJAUNNo ratings yet
- F2140 Eng DatasheetDocument4 pagesF2140 Eng Datasheettngyew leeNo ratings yet
- DCM Series Brushed Servo Motors: Electrical SpecificationsDocument3 pagesDCM Series Brushed Servo Motors: Electrical SpecificationsNguyen Van ThaiNo ratings yet
- Catalog Motor EC90Flat 323772Document1 pageCatalog Motor EC90Flat 323772Lucas SuplinoNo ratings yet
- M48x50 24V EngDocument2 pagesM48x50 24V EngCristianNo ratings yet
- C4-16X Electrical SpecificationDocument1 pageC4-16X Electrical SpecificationNguyen Van ThaiNo ratings yet
- C4-16X Electrical SpecificationDocument1 pageC4-16X Electrical SpecificationNguyen Van ThaiNo ratings yet
- 16n28 Brushed DC Motor DatasheetDocument1 page16n28 Brushed DC Motor DatasheetPaweł DoboszNo ratings yet
- BLDC Motor 6 MM: ECX SPEED 6 M BrushlessDocument1 pageBLDC Motor 6 MM: ECX SPEED 6 M Brushlesskishan kharelNo ratings yet
- Mot-An-S en 20160403Document9 pagesMot-An-S en 20160403DARIONo ratings yet
- Maxon EC20 Flat 5wattDocument1 pageMaxon EC20 Flat 5wattElectromateNo ratings yet
- Maxon EC-Max40 70wattDocument1 pageMaxon EC-Max40 70wattElectromateNo ratings yet
- 17 en 170 Lstage DatasheetDocument1 page17 en 170 Lstage DatasheetSana SyedNo ratings yet
- Maxon RE25 Precious Metal Brushes 10wattDocument1 pageMaxon RE25 Precious Metal Brushes 10wattElectromateNo ratings yet
- G493 Series Servo MotorsDocument4 pagesG493 Series Servo MotorsIain JubbNo ratings yet
- ZWS90Document2 pagesZWS90pawelprusNo ratings yet
- Beam ReportDocument64 pagesBeam ReportOkechukwu BenjaminNo ratings yet
- Maxon EC6 1.2wattDocument1 pageMaxon EC6 1.2wattElectromateNo ratings yet
- RE50Document1 pageRE50Yhony Gamarra VargasNo ratings yet
- Motores PDFDocument1 pageMotores PDFJorge Alejandro Barrutia BorbollaNo ratings yet
- IT6468 0911gbDocument24 pagesIT6468 0911gbmarcos lemosNo ratings yet
- DatasheetDocument1 pageDatasheetzukijaNo ratings yet
- S7L1D-G4 Wdg.312 - Technical Data SheetDocument9 pagesS7L1D-G4 Wdg.312 - Technical Data Sheet3efoo100% (1)
- MT30R4ExtractDocument12 pagesMT30R4ExtractalejandroNo ratings yet
- En 21 300Document1 pageEn 21 300Oskar Askarbek PazylbekovNo ratings yet
- Maxon EC20 Flat 3wattDocument1 pageMaxon EC20 Flat 3wattElectromateNo ratings yet
- Maxon Ec45 136210Document1 pageMaxon Ec45 136210compimagmaticNo ratings yet
- 16 275 enDocument1 page16 275 enmawadNo ratings yet
- Maxon EC-Max16 5wattDocument1 pageMaxon EC-Max16 5wattElectromateNo ratings yet
- Mot-Ec - enDocument8 pagesMot-Ec - enYERKO ANDRÉS GONZÁLEZNo ratings yet
- Maxon Motor Amax26 SpecDocument1 pageMaxon Motor Amax26 SpecjangetialNo ratings yet
- Maxon EC45 Flat 30wattDocument1 pageMaxon EC45 Flat 30wattElectromateNo ratings yet
- Motores Maxon 2017Document1 pageMotores Maxon 2017--No ratings yet
- 180 Series Servo Motors: Dimension: Unit MMDocument1 page180 Series Servo Motors: Dimension: Unit MMMax QuintanillaNo ratings yet
- En 21 250Document1 pageEn 21 250compimagmaticNo ratings yet
- En 21 171Document1 pageEn 21 171pham tamNo ratings yet
- 2KJ3514-3KN38-9AR1-Z B33+C46+D11+K01+K06+L02+L75+M10+M59+N1S+P92 Datasheet enDocument2 pages2KJ3514-3KN38-9AR1-Z B33+C46+D11+K01+K06+L02+L75+M10+M59+N1S+P92 Datasheet encaukhoeoNo ratings yet
- Maxon EC22 20watt Integrated ElectronicsDocument2 pagesMaxon EC22 20watt Integrated ElectronicsElectromateNo ratings yet
- DC Motor With Permanent Magnet: PG 4520 PG 4520 PG 4525 PG 4525Document1 pageDC Motor With Permanent Magnet: PG 4520 PG 4520 PG 4525 PG 4525NewsUPdateNo ratings yet
- ALBRY10021H00AA InstDocument10 pagesALBRY10021H00AA InstMarcus TornovskyNo ratings yet
- Precious Metal Commutation Ø22Mm 8.8 MNM: Electrical Data 216P 216E 213E 210E 208E 105Document1 pagePrecious Metal Commutation Ø22Mm 8.8 MNM: Electrical Data 216P 216E 213E 210E 208E 105johnNo ratings yet
- Motor Maxon 323772Document1 pageMotor Maxon 323772Henry Daniel VerdugoNo ratings yet
- S6L1D-C4 Wdg.311 - 312 - Technical Data SheetDocument8 pagesS6L1D-C4 Wdg.311 - 312 - Technical Data Sheetsarahalawa222No ratings yet
- 81 PDFDocument1 page81 PDFRatanieriNo ratings yet
- 30 MM, Graphite Brushes, 60 Watt: Order NumberDocument1 page30 MM, Graphite Brushes, 60 Watt: Order NumberRatanieriNo ratings yet
- Technical Data Sheet For Avk-Alternators: Unsaturated Saturated Unsaturated SaturatedDocument9 pagesTechnical Data Sheet For Avk-Alternators: Unsaturated Saturated Unsaturated SaturatedEndang SunartiNo ratings yet
- ROQ 425 Absolute Rotary Encoders With TTL or HTL SignalsDocument9 pagesROQ 425 Absolute Rotary Encoders With TTL or HTL SignalsMr.T FYINo ratings yet
- The Design of Modern Microwave Oscillators for Wireless Applications: Theory and OptimizationFrom EverandThe Design of Modern Microwave Oscillators for Wireless Applications: Theory and OptimizationNo ratings yet
- Flexible Power Transmission: The HVDC OptionsFrom EverandFlexible Power Transmission: The HVDC OptionsRating: 5 out of 5 stars5/5 (1)
- Signal Integrity and Radiated Emission of High-Speed Digital SystemsFrom EverandSignal Integrity and Radiated Emission of High-Speed Digital SystemsNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- SEIN SAC CatalogugDocument75 pagesSEIN SAC CatalogugRahmanu AribowoNo ratings yet
- Canon Ir3100c - Service ManualDocument1,069 pagesCanon Ir3100c - Service ManualSMART REFILL67% (3)
- Papacad: Light Gantry Crane 500 KGDocument1 pagePapacad: Light Gantry Crane 500 KGminh hiếu nguyễnNo ratings yet
- Seminar Topic: The Use of Computer For Automobile DesignDocument17 pagesSeminar Topic: The Use of Computer For Automobile DesignAjewole Eben TopeNo ratings yet
- PPTDocument18 pagesPPTJyant KhobragadeNo ratings yet
- Validating The MD5 Checksum of A FileDocument4 pagesValidating The MD5 Checksum of A FileSandra GilbertNo ratings yet
- Datasheet Rtu Scada Complete SolutionDocument2 pagesDatasheet Rtu Scada Complete Solutionsoltani aliNo ratings yet
- UI UX Designer BootcampDocument21 pagesUI UX Designer BootcampSam AryanNo ratings yet
- Learning Continuity Plan During Covid-19 S.Y. 2020-2021: Department of EducationDocument17 pagesLearning Continuity Plan During Covid-19 S.Y. 2020-2021: Department of EducationMark-Christopher Roi Pelobello MontemayorNo ratings yet
- Flip-Flops: Basic ConceptsDocument32 pagesFlip-Flops: Basic ConceptsМилан ЛукићNo ratings yet
- Pressure Sensors QBE2002-P.. - enDocument6 pagesPressure Sensors QBE2002-P.. - entarek.amirecheNo ratings yet
- GLADIS User Guide May2023Document7 pagesGLADIS User Guide May2023D ardikaNo ratings yet
- Ficha Tecnica Motor Perkins 403d-15gDocument4 pagesFicha Tecnica Motor Perkins 403d-15gChristian OcampoNo ratings yet
- 22dj0012 Pow - BuildingDocument106 pages22dj0012 Pow - BuildingLESTER PAOLO APINONo ratings yet
- Setting Up VPN Connection Between Two Scalance SCDocument32 pagesSetting Up VPN Connection Between Two Scalance SCOleksandr HusievNo ratings yet
- Demystifying The TVSSDocument4 pagesDemystifying The TVSSmentongNo ratings yet
- Welcome To The Course On Industrial Automation and ControlDocument25 pagesWelcome To The Course On Industrial Automation and ControlvattuNo ratings yet
- Mediaandinformationliteracymil Visualinformationandmediapart3 170910121157Document33 pagesMediaandinformationliteracymil Visualinformationandmediapart3 170910121157Anonymous xagGSIdNo ratings yet
- Automatic Speed BreakerDocument6 pagesAutomatic Speed BreakerIJRASETPublicationsNo ratings yet
- Clutch Cylinder With PWM Valves and Sensor PDFDocument2 pagesClutch Cylinder With PWM Valves and Sensor PDFSherzad Chem100% (5)
- TAB (Technology Applications in Business) 2021-2022: Digital Is A Lifestyle Not A TechnologyDocument15 pagesTAB (Technology Applications in Business) 2021-2022: Digital Is A Lifestyle Not A TechnologyMOHAMMED AMIN SHAIKHNo ratings yet
- GF Pre Acp Eng PDFDocument626 pagesGF Pre Acp Eng PDFMessias De Oliveira SantosNo ratings yet
- Spare Parts List (59700670) Spare Parts List CV 30/1 - CV 38/1Document18 pagesSpare Parts List (59700670) Spare Parts List CV 30/1 - CV 38/1warick mNo ratings yet
- What Is The Difference Between IPE and HEADocument5 pagesWhat Is The Difference Between IPE and HEABayar DiyarNo ratings yet
- Signals and SystemsDocument18 pagesSignals and SystemsWaqas Kiani100% (1)
- Roland A880 Owner ManualDocument9 pagesRoland A880 Owner ManualSteven ClementsNo ratings yet