
Dados de Máquina
Dados de Máquina
You might also like
- 4CS015 - Workshop #5: To Be SubmittedDocument7 pages4CS015 - Workshop #5: To Be SubmittedSisa Juma100% (1)
- How To Formulate UVDocument16 pagesHow To Formulate UVtobass82100% (3)
- Iec 61400-22Document59 pagesIec 61400-22Barbu Alexandru Iulian50% (2)
- 802Dsl BEDocument3 pages802Dsl BEShelton HodzieszNo ratings yet
- Datasheet: ToshibaDocument11 pagesDatasheet: ToshibaSergio Trujillo CerroNo ratings yet
- 810 D CommissioningDocument6 pages810 D CommissioningPatryk MarczewskiNo ratings yet
- 7SR11 and 7SR12 - MODBUS-199-206Document8 pages7SR11 and 7SR12 - MODBUS-199-206mullamoinNo ratings yet
- cx1020 HwenDocument123 pagescx1020 HwenJulio PérezNo ratings yet
- VFD Parameter SettingsDocument20 pagesVFD Parameter SettingsAmmar AlkindyNo ratings yet
- RVP510 01 - en UsDocument4 pagesRVP510 01 - en UsJose Ernesto AcevedoNo ratings yet
- Softwired ControllerDocument4 pagesSoftwired ControllerShreya SinghNo ratings yet
- Network Introduction - 1Document78 pagesNetwork Introduction - 1kusumNo ratings yet
- Midterm 1Document23 pagesMidterm 1JetNo ratings yet
- Easy800 PID Controller HLP enDocument4 pagesEasy800 PID Controller HLP enSlobodan RadovanovicNo ratings yet
- Functional Description C24 Limiting Decoder Block AheadDocument20 pagesFunctional Description C24 Limiting Decoder Block AheadAlex SalvadorNo ratings yet
- Basic Parameter Setting Needs To Be Done To Run Two Servo and One Spindle - For 0i-FDocument6 pagesBasic Parameter Setting Needs To Be Done To Run Two Servo and One Spindle - For 0i-FAdvance CNC TechnologiesNo ratings yet
- L6 AssembersDocument8 pagesL6 AssembersShivansh PundirNo ratings yet
- HRW Hpe8884p1 v4 Manual 100908Document21 pagesHRW Hpe8884p1 v4 Manual 100908game kuNo ratings yet
- 01 P40s Alfons Haar Complete ManualDocument377 pages01 P40s Alfons Haar Complete ManualCristian RomeroNo ratings yet
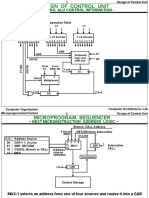
- Design of Control Unit: - Decoding Alu Control InformationDocument4 pagesDesign of Control Unit: - Decoding Alu Control InformationDawood MaNo ratings yet
- Xyc-600 Paramater Drive Xyc-600Document1 pageXyc-600 Paramater Drive Xyc-600andres1989mNo ratings yet
- Iso8583 150204013523 Conversion Gate02 PDFDocument29 pagesIso8583 150204013523 Conversion Gate02 PDFhvalolaNo ratings yet
- MANUAL Driver CDE360 CanworldDocument267 pagesMANUAL Driver CDE360 CanworldJehison EscobarNo ratings yet
- Assignment No 3 Course Code: CAP254 SYSTEMDocument11 pagesAssignment No 3 Course Code: CAP254 SYSTEMSurendra Singh ChauhanNo ratings yet
- Design Note DN509: Data Whitening and Random TX ModeDocument34 pagesDesign Note DN509: Data Whitening and Random TX ModeKnowledge SausageNo ratings yet
- LCD Module Technical Specification: First EditionDocument32 pagesLCD Module Technical Specification: First Editionmarco antonioNo ratings yet
- 3Document55 pages3aimamNo ratings yet
- Datasheet DD2603Document3 pagesDatasheet DD2603RONALD TERRAZASNo ratings yet
- Micro Programmed ControlDocument13 pagesMicro Programmed Controlthivaharan_1981No ratings yet
- Microprocessor LABDocument106 pagesMicroprocessor LABHari GNo ratings yet
- DMF50174ZNB FWDocument18 pagesDMF50174ZNB FWNemesys TOFNo ratings yet
- Heidenhein ITNC530 enDocument1,228 pagesHeidenhein ITNC530 enwadimNo ratings yet
- Unit 2-1Document24 pagesUnit 2-1kiran281196No ratings yet
- Microprogram ControlDocument30 pagesMicroprogram ControlMit BhaiyaNo ratings yet
- AA104VC08 MitsubishiDocument23 pagesAA104VC08 MitsubishiJosé AdelinoNo ratings yet
- Mokon Series Driver User's Manual V2.0: Js Automation CorpDocument69 pagesMokon Series Driver User's Manual V2.0: Js Automation CorpAhmedNo ratings yet
- MW95A Belt Weigher System: Setup SummaryDocument16 pagesMW95A Belt Weigher System: Setup Summarysujit patelNo ratings yet
- Series DCK31: Motor Type 404 867Document1 pageSeries DCK31: Motor Type 404 867karndis kanthaNo ratings yet
- ECI Motor.: PapstDocument3 pagesECI Motor.: PapstChandramohan MuruganNo ratings yet
- 9.2.1.2 Certificado Datalogger - Encardio RiteDocument1 page9.2.1.2 Certificado Datalogger - Encardio RiteitalodexNo ratings yet
- Nominal Life: Point of SelectionDocument2 pagesNominal Life: Point of SelectionAryo WicaksonoNo ratings yet
- Technical Manual iTNC530 EnglishDocument1,827 pagesTechnical Manual iTNC530 Englishbrainz2use95% (20)
- XGB-H Programmable Logic Controller: N N N N N N N N N NDocument5 pagesXGB-H Programmable Logic Controller: N N N N N N N N N NVu MinhNo ratings yet
- PG DGS-1600Gx0 A22-55 MTDDocument17 pagesPG DGS-1600Gx0 A22-55 MTDTưởng VũNo ratings yet
- DN502 - CRC ImplementationDocument7 pagesDN502 - CRC ImplementationVũ Nguyễn VănNo ratings yet
- Table M.2.2: ODD AUTHENTICATE With Extended Data: ETSI TS 102 221 V17.1.0 (2022-02) 188Document2 pagesTable M.2.2: ODD AUTHENTICATE With Extended Data: ETSI TS 102 221 V17.1.0 (2022-02) 188ohsfh oologhNo ratings yet
- Absolute Multiturn Encoder With Solid Shaft: 1 M3 Depth 6 MM 2 M4 Depth 6 MMDocument3 pagesAbsolute Multiturn Encoder With Solid Shaft: 1 M3 Depth 6 MM 2 M4 Depth 6 MMRadu CrisanNo ratings yet
- DS1103 - Adaptive Control Encoders 10052016Document41 pagesDS1103 - Adaptive Control Encoders 10052016hieuhuechchNo ratings yet
- C9 Timers2Document20 pagesC9 Timers2bayav.nimetollaNo ratings yet
- Torquetrak 10K Torque Telemetry SystemDocument44 pagesTorquetrak 10K Torque Telemetry SystemkikepolegatoNo ratings yet
- Basic PLCDocument34 pagesBasic PLCESHA VARSHNEYNo ratings yet
- Maintenance & Adjustment: 1. GeneralDocument18 pagesMaintenance & Adjustment: 1. GeneralLam Nhat QuangNo ratings yet
- Datasheet 404 864Document1 pageDatasheet 404 864Jorge MartinezNo ratings yet
- MW95A Belt Weigher System: Setup SummaryDocument15 pagesMW95A Belt Weigher System: Setup SummaryRamu RamuNo ratings yet
- 0299 251 2 Sys Di en 144Document36 pages0299 251 2 Sys Di en 144api-19483250100% (1)
- Application Examples of Basic Commands: I/O AssignmentDocument10 pagesApplication Examples of Basic Commands: I/O AssignmentDjokataNo ratings yet
- Webinar - Troubleshooting Torsional Vibration Challenges With Rotating Machinery - tcm27-77700Document64 pagesWebinar - Troubleshooting Torsional Vibration Challenges With Rotating Machinery - tcm27-77700Huang XiaodianNo ratings yet
- 05.2007 Parameter ListDocument184 pages05.2007 Parameter ListDeMen NguyenNo ratings yet
- RF01 Programming Guide: 1 Brief DescriptionDocument18 pagesRF01 Programming Guide: 1 Brief DescriptionMUHAMMAD SISWANTORONo ratings yet
- TCH ProbeDocument149 pagesTCH ProbeСлоба ЈовановићNo ratings yet
- Photoelectric Distance SensorDocument6 pagesPhotoelectric Distance SensorRaj Kumar AhmedNo ratings yet
- Case Study - Box-JenkinsDocument10 pagesCase Study - Box-JenkinsVedant MishraNo ratings yet
- Quizapp: 15It324E Mini Project ReportDocument24 pagesQuizapp: 15It324E Mini Project ReportSubroto DasNo ratings yet
- Detecting Unseen Malicious VBA Macros With NLPTechniquesDocument9 pagesDetecting Unseen Malicious VBA Macros With NLPTechniquesPrakash ChandraNo ratings yet
- The Five Pillars of Effective WritingDocument4 pagesThe Five Pillars of Effective WritingPrecy M AgatonNo ratings yet
- Classroom Program 10B 2023 2024Document2 pagesClassroom Program 10B 2023 2024jester18 bordersyoNo ratings yet
- Trends in Food Science & Technology: SciencedirectDocument13 pagesTrends in Food Science & Technology: SciencedirectIlija MileticNo ratings yet
- Thermaltake Chaser A31 CaseDocument9 pagesThermaltake Chaser A31 CaseZameriuNo ratings yet
- DM Assignment 1Document5 pagesDM Assignment 1Mai Anh TrầnNo ratings yet
- Genetic Mutation LAB SHEET REVISEDDocument2 pagesGenetic Mutation LAB SHEET REVISEDyusufoyololaNo ratings yet
- Aide Memoire On UtilitiesDocument11 pagesAide Memoire On UtilitiesFaress RabiNo ratings yet
- Macbeth Lesson PlanDocument2 pagesMacbeth Lesson Planrymahoney10No ratings yet
- Chapter 1: Scientific Understanding of Behavior: Learning ObjectivesDocument13 pagesChapter 1: Scientific Understanding of Behavior: Learning Objectiveshallo BroNo ratings yet
- Pineal Gland A Spiritual Third Eye An OdDocument4 pagesPineal Gland A Spiritual Third Eye An OdAsli Melek DoenerNo ratings yet
- Computed Radiography (CR) : Dosen: Anak Agung Aris Diartama, S.ST, M.TR - IDDocument28 pagesComputed Radiography (CR) : Dosen: Anak Agung Aris Diartama, S.ST, M.TR - IDKevin TagahNo ratings yet
- Hazcom ToolsDocument25 pagesHazcom ToolsAbdul hayeeNo ratings yet
- Pontryagin's Maximum PrincipleDocument21 pagesPontryagin's Maximum PrincipleAhmed TalbiNo ratings yet
- Safety Matrix Master - Rev 1Document5 pagesSafety Matrix Master - Rev 1praagthishNo ratings yet
- Cut Out ValveDocument64 pagesCut Out ValveHoang L A TuanNo ratings yet
- Cooling TowerDocument2 pagesCooling TowerLance Darren GalorportNo ratings yet
- John Deere - Parts Catalog - Frame 5 v-3103Document2 pagesJohn Deere - Parts Catalog - Frame 5 v-3103eliasNo ratings yet
- Contoh Iklan BrosurDocument10 pagesContoh Iklan BrosurMuhamad AkhirohNo ratings yet
- CIO 308 Data Sheet 4921240554 UKDocument10 pagesCIO 308 Data Sheet 4921240554 UKWaseem AhmadNo ratings yet
- Computer Graphics - Chapter 3 (1) - 2Document35 pagesComputer Graphics - Chapter 3 (1) - 2Sương TrầnNo ratings yet
- BS en Iso 18563-2-2017 - (2018-02-08 - 12-55-15 Am)Document18 pagesBS en Iso 18563-2-2017 - (2018-02-08 - 12-55-15 Am)PradeepNo ratings yet
- Retail Assignment RenzJanuaryDocument3 pagesRetail Assignment RenzJanuaryHoneyPotGameing d (HoneyPotGaming)No ratings yet
- Pre - Board - 2 STD XII MathematicsDocument7 pagesPre - Board - 2 STD XII MathematicsPradip MohiteNo ratings yet
- Bandstop Filters and The Bainter Topology: by Bonnie C. BakerDocument5 pagesBandstop Filters and The Bainter Topology: by Bonnie C. Bakerpaoki01No ratings yet
- Internship 2021Document25 pagesInternship 2021PRAGYA CHANSORIYANo ratings yet




















































































Download as pdf or txt
You might also like
- 4CS015 - Workshop #5: To Be SubmittedDocument7 pages4CS015 - Workshop #5: To Be SubmittedSisa Juma100% (1)
- How To Formulate UVDocument16 pagesHow To Formulate UVtobass82100% (3)
- Iec 61400-22Document59 pagesIec 61400-22Barbu Alexandru Iulian50% (2)
- 802Dsl BEDocument3 pages802Dsl BEShelton HodzieszNo ratings yet
- Datasheet: ToshibaDocument11 pagesDatasheet: ToshibaSergio Trujillo CerroNo ratings yet
- 810 D CommissioningDocument6 pages810 D CommissioningPatryk MarczewskiNo ratings yet
- 7SR11 and 7SR12 - MODBUS-199-206Document8 pages7SR11 and 7SR12 - MODBUS-199-206mullamoinNo ratings yet
- cx1020 HwenDocument123 pagescx1020 HwenJulio PérezNo ratings yet
- VFD Parameter SettingsDocument20 pagesVFD Parameter SettingsAmmar AlkindyNo ratings yet
- RVP510 01 - en UsDocument4 pagesRVP510 01 - en UsJose Ernesto AcevedoNo ratings yet
- Softwired ControllerDocument4 pagesSoftwired ControllerShreya SinghNo ratings yet
- Network Introduction - 1Document78 pagesNetwork Introduction - 1kusumNo ratings yet
- Midterm 1Document23 pagesMidterm 1JetNo ratings yet
- Easy800 PID Controller HLP enDocument4 pagesEasy800 PID Controller HLP enSlobodan RadovanovicNo ratings yet
- Functional Description C24 Limiting Decoder Block AheadDocument20 pagesFunctional Description C24 Limiting Decoder Block AheadAlex SalvadorNo ratings yet
- Basic Parameter Setting Needs To Be Done To Run Two Servo and One Spindle - For 0i-FDocument6 pagesBasic Parameter Setting Needs To Be Done To Run Two Servo and One Spindle - For 0i-FAdvance CNC TechnologiesNo ratings yet
- L6 AssembersDocument8 pagesL6 AssembersShivansh PundirNo ratings yet
- HRW Hpe8884p1 v4 Manual 100908Document21 pagesHRW Hpe8884p1 v4 Manual 100908game kuNo ratings yet
- 01 P40s Alfons Haar Complete ManualDocument377 pages01 P40s Alfons Haar Complete ManualCristian RomeroNo ratings yet
- Design of Control Unit: - Decoding Alu Control InformationDocument4 pagesDesign of Control Unit: - Decoding Alu Control InformationDawood MaNo ratings yet
- Xyc-600 Paramater Drive Xyc-600Document1 pageXyc-600 Paramater Drive Xyc-600andres1989mNo ratings yet
- Iso8583 150204013523 Conversion Gate02 PDFDocument29 pagesIso8583 150204013523 Conversion Gate02 PDFhvalolaNo ratings yet
- MANUAL Driver CDE360 CanworldDocument267 pagesMANUAL Driver CDE360 CanworldJehison EscobarNo ratings yet
- Assignment No 3 Course Code: CAP254 SYSTEMDocument11 pagesAssignment No 3 Course Code: CAP254 SYSTEMSurendra Singh ChauhanNo ratings yet
- Design Note DN509: Data Whitening and Random TX ModeDocument34 pagesDesign Note DN509: Data Whitening and Random TX ModeKnowledge SausageNo ratings yet
- LCD Module Technical Specification: First EditionDocument32 pagesLCD Module Technical Specification: First Editionmarco antonioNo ratings yet
- 3Document55 pages3aimamNo ratings yet
- Datasheet DD2603Document3 pagesDatasheet DD2603RONALD TERRAZASNo ratings yet
- Micro Programmed ControlDocument13 pagesMicro Programmed Controlthivaharan_1981No ratings yet
- Microprocessor LABDocument106 pagesMicroprocessor LABHari GNo ratings yet
- DMF50174ZNB FWDocument18 pagesDMF50174ZNB FWNemesys TOFNo ratings yet
- Heidenhein ITNC530 enDocument1,228 pagesHeidenhein ITNC530 enwadimNo ratings yet
- Unit 2-1Document24 pagesUnit 2-1kiran281196No ratings yet
- Microprogram ControlDocument30 pagesMicroprogram ControlMit BhaiyaNo ratings yet
- AA104VC08 MitsubishiDocument23 pagesAA104VC08 MitsubishiJosé AdelinoNo ratings yet
- Mokon Series Driver User's Manual V2.0: Js Automation CorpDocument69 pagesMokon Series Driver User's Manual V2.0: Js Automation CorpAhmedNo ratings yet
- MW95A Belt Weigher System: Setup SummaryDocument16 pagesMW95A Belt Weigher System: Setup Summarysujit patelNo ratings yet
- Series DCK31: Motor Type 404 867Document1 pageSeries DCK31: Motor Type 404 867karndis kanthaNo ratings yet
- ECI Motor.: PapstDocument3 pagesECI Motor.: PapstChandramohan MuruganNo ratings yet
- 9.2.1.2 Certificado Datalogger - Encardio RiteDocument1 page9.2.1.2 Certificado Datalogger - Encardio RiteitalodexNo ratings yet
- Nominal Life: Point of SelectionDocument2 pagesNominal Life: Point of SelectionAryo WicaksonoNo ratings yet
- Technical Manual iTNC530 EnglishDocument1,827 pagesTechnical Manual iTNC530 Englishbrainz2use95% (20)
- XGB-H Programmable Logic Controller: N N N N N N N N N NDocument5 pagesXGB-H Programmable Logic Controller: N N N N N N N N N NVu MinhNo ratings yet
- PG DGS-1600Gx0 A22-55 MTDDocument17 pagesPG DGS-1600Gx0 A22-55 MTDTưởng VũNo ratings yet
- DN502 - CRC ImplementationDocument7 pagesDN502 - CRC ImplementationVũ Nguyễn VănNo ratings yet
- Table M.2.2: ODD AUTHENTICATE With Extended Data: ETSI TS 102 221 V17.1.0 (2022-02) 188Document2 pagesTable M.2.2: ODD AUTHENTICATE With Extended Data: ETSI TS 102 221 V17.1.0 (2022-02) 188ohsfh oologhNo ratings yet
- Absolute Multiturn Encoder With Solid Shaft: 1 M3 Depth 6 MM 2 M4 Depth 6 MMDocument3 pagesAbsolute Multiturn Encoder With Solid Shaft: 1 M3 Depth 6 MM 2 M4 Depth 6 MMRadu CrisanNo ratings yet
- DS1103 - Adaptive Control Encoders 10052016Document41 pagesDS1103 - Adaptive Control Encoders 10052016hieuhuechchNo ratings yet
- C9 Timers2Document20 pagesC9 Timers2bayav.nimetollaNo ratings yet
- Torquetrak 10K Torque Telemetry SystemDocument44 pagesTorquetrak 10K Torque Telemetry SystemkikepolegatoNo ratings yet
- Basic PLCDocument34 pagesBasic PLCESHA VARSHNEYNo ratings yet
- Maintenance & Adjustment: 1. GeneralDocument18 pagesMaintenance & Adjustment: 1. GeneralLam Nhat QuangNo ratings yet
- Datasheet 404 864Document1 pageDatasheet 404 864Jorge MartinezNo ratings yet
- MW95A Belt Weigher System: Setup SummaryDocument15 pagesMW95A Belt Weigher System: Setup SummaryRamu RamuNo ratings yet
- 0299 251 2 Sys Di en 144Document36 pages0299 251 2 Sys Di en 144api-19483250100% (1)
- Application Examples of Basic Commands: I/O AssignmentDocument10 pagesApplication Examples of Basic Commands: I/O AssignmentDjokataNo ratings yet
- Webinar - Troubleshooting Torsional Vibration Challenges With Rotating Machinery - tcm27-77700Document64 pagesWebinar - Troubleshooting Torsional Vibration Challenges With Rotating Machinery - tcm27-77700Huang XiaodianNo ratings yet
- 05.2007 Parameter ListDocument184 pages05.2007 Parameter ListDeMen NguyenNo ratings yet
- RF01 Programming Guide: 1 Brief DescriptionDocument18 pagesRF01 Programming Guide: 1 Brief DescriptionMUHAMMAD SISWANTORONo ratings yet
- TCH ProbeDocument149 pagesTCH ProbeСлоба ЈовановићNo ratings yet
- Photoelectric Distance SensorDocument6 pagesPhotoelectric Distance SensorRaj Kumar AhmedNo ratings yet
- Case Study - Box-JenkinsDocument10 pagesCase Study - Box-JenkinsVedant MishraNo ratings yet
- Quizapp: 15It324E Mini Project ReportDocument24 pagesQuizapp: 15It324E Mini Project ReportSubroto DasNo ratings yet
- Detecting Unseen Malicious VBA Macros With NLPTechniquesDocument9 pagesDetecting Unseen Malicious VBA Macros With NLPTechniquesPrakash ChandraNo ratings yet
- The Five Pillars of Effective WritingDocument4 pagesThe Five Pillars of Effective WritingPrecy M AgatonNo ratings yet
- Classroom Program 10B 2023 2024Document2 pagesClassroom Program 10B 2023 2024jester18 bordersyoNo ratings yet
- Trends in Food Science & Technology: SciencedirectDocument13 pagesTrends in Food Science & Technology: SciencedirectIlija MileticNo ratings yet
- Thermaltake Chaser A31 CaseDocument9 pagesThermaltake Chaser A31 CaseZameriuNo ratings yet
- DM Assignment 1Document5 pagesDM Assignment 1Mai Anh TrầnNo ratings yet
- Genetic Mutation LAB SHEET REVISEDDocument2 pagesGenetic Mutation LAB SHEET REVISEDyusufoyololaNo ratings yet
- Aide Memoire On UtilitiesDocument11 pagesAide Memoire On UtilitiesFaress RabiNo ratings yet
- Macbeth Lesson PlanDocument2 pagesMacbeth Lesson Planrymahoney10No ratings yet
- Chapter 1: Scientific Understanding of Behavior: Learning ObjectivesDocument13 pagesChapter 1: Scientific Understanding of Behavior: Learning Objectiveshallo BroNo ratings yet
- Pineal Gland A Spiritual Third Eye An OdDocument4 pagesPineal Gland A Spiritual Third Eye An OdAsli Melek DoenerNo ratings yet
- Computed Radiography (CR) : Dosen: Anak Agung Aris Diartama, S.ST, M.TR - IDDocument28 pagesComputed Radiography (CR) : Dosen: Anak Agung Aris Diartama, S.ST, M.TR - IDKevin TagahNo ratings yet
- Hazcom ToolsDocument25 pagesHazcom ToolsAbdul hayeeNo ratings yet
- Pontryagin's Maximum PrincipleDocument21 pagesPontryagin's Maximum PrincipleAhmed TalbiNo ratings yet
- Safety Matrix Master - Rev 1Document5 pagesSafety Matrix Master - Rev 1praagthishNo ratings yet
- Cut Out ValveDocument64 pagesCut Out ValveHoang L A TuanNo ratings yet
- Cooling TowerDocument2 pagesCooling TowerLance Darren GalorportNo ratings yet
- John Deere - Parts Catalog - Frame 5 v-3103Document2 pagesJohn Deere - Parts Catalog - Frame 5 v-3103eliasNo ratings yet
- Contoh Iklan BrosurDocument10 pagesContoh Iklan BrosurMuhamad AkhirohNo ratings yet
- CIO 308 Data Sheet 4921240554 UKDocument10 pagesCIO 308 Data Sheet 4921240554 UKWaseem AhmadNo ratings yet
- Computer Graphics - Chapter 3 (1) - 2Document35 pagesComputer Graphics - Chapter 3 (1) - 2Sương TrầnNo ratings yet
- BS en Iso 18563-2-2017 - (2018-02-08 - 12-55-15 Am)Document18 pagesBS en Iso 18563-2-2017 - (2018-02-08 - 12-55-15 Am)PradeepNo ratings yet
- Retail Assignment RenzJanuaryDocument3 pagesRetail Assignment RenzJanuaryHoneyPotGameing d (HoneyPotGaming)No ratings yet
- Pre - Board - 2 STD XII MathematicsDocument7 pagesPre - Board - 2 STD XII MathematicsPradip MohiteNo ratings yet
- Bandstop Filters and The Bainter Topology: by Bonnie C. BakerDocument5 pagesBandstop Filters and The Bainter Topology: by Bonnie C. Bakerpaoki01No ratings yet
- Internship 2021Document25 pagesInternship 2021PRAGYA CHANSORIYANo ratings yet