Download as pdf or txt
You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Tiny Tweaks James WedmoreDocument31 pagesTiny Tweaks James WedmoreErise Global100% (1)
- List of Government WebsitesDocument1 pageList of Government Websitessumit-7No ratings yet
- Tak 2020Document18 pagesTak 2020shahin mirzaeiNo ratings yet
- Machines 10 00559Document16 pagesMachines 10 00559pedroNo ratings yet
- Electromagnetic Design of SynchronousDocument6 pagesElectromagnetic Design of SynchronousedumacerenNo ratings yet
- Flux-Barrier Design and Torque Performance Analysis of Synchronous Reluctance Motor With Low Torque RippleDocument20 pagesFlux-Barrier Design and Torque Performance Analysis of Synchronous Reluctance Motor With Low Torque RippleMt GolesNo ratings yet
- Parametric Analysis of PMSMDocument16 pagesParametric Analysis of PMSMSanjayNo ratings yet
- Synchronous Reluctance Motor: Design, Optimization and ValidationDocument6 pagesSynchronous Reluctance Motor: Design, Optimization and Validationmr. dossNo ratings yet
- Design Optimization of Axial Flux Permanent Magnet Synchronous Machine Using 3d FEMDocument15 pagesDesign Optimization of Axial Flux Permanent Magnet Synchronous Machine Using 3d FEMaugustoNo ratings yet
- Design and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainDocument7 pagesDesign and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainMC ANo ratings yet
- Design and Control of Axial-Flux Brushless DC Wheel Motors For Electric Vehicles-Part I Multiobjective Optimal Design and AnalysisDocument10 pagesDesign and Control of Axial-Flux Brushless DC Wheel Motors For Electric Vehicles-Part I Multiobjective Optimal Design and Analysishooshyar100% (1)
- Consideraciones de Diseño para Un Freno Magnetorreológico AutomotrizDocument14 pagesConsideraciones de Diseño para Un Freno Magnetorreológico AutomotrizYisus ÅkerfeldtNo ratings yet
- A Fast Method For Modelling Skew and Its Effects in Salient-Pole Synchronous GeneratorsDocument10 pagesA Fast Method For Modelling Skew and Its Effects in Salient-Pole Synchronous GeneratorsGuru NathanNo ratings yet
- Design and Analysis of A Rotor For A 22 KW TLA SynRMDocument8 pagesDesign and Analysis of A Rotor For A 22 KW TLA SynRMMaiank Sri SinghNo ratings yet
- 492 FerreiraDocument6 pages492 FerreiraRonald LiemNo ratings yet
- IEEE-TOM - Journal ArticleDocument4 pagesIEEE-TOM - Journal ArticleedumacerenNo ratings yet
- Fast Optimization of The Magnetic Model by Means of Reluctance Network For PMa-SynRMDocument6 pagesFast Optimization of The Magnetic Model by Means of Reluctance Network For PMa-SynRMJoao Pedro QuevedoNo ratings yet
- Factor Analysis of Torque Ripple Reduction in Synchronous Reluctance Motors Derived From Topology OptimizationDocument8 pagesFactor Analysis of Torque Ripple Reduction in Synchronous Reluctance Motors Derived From Topology OptimizationRaphaelNo ratings yet
- Analysis and Design Optimization of An Improved AxDocument9 pagesAnalysis and Design Optimization of An Improved AxSubrat DasNo ratings yet
- 1765 ArticleText 15686 1 10 20210325Document14 pages1765 ArticleText 15686 1 10 20210325direkap280No ratings yet
- Design of Axial-Flux Motor For Traction ApplicatioDocument13 pagesDesign of Axial-Flux Motor For Traction Applicatioantriksh mahajanNo ratings yet
- Ep - 1 SynopsisDocument15 pagesEp - 1 SynopsisManas GuravNo ratings yet
- FEM Based Design and Performance Analysis of 2-Poles Universal MotorDocument15 pagesFEM Based Design and Performance Analysis of 2-Poles Universal MotorBalaji DDNo ratings yet
- Machines: A Novel Approach To The Design of Axial-Flux Switched-Reluctance MotorsDocument28 pagesMachines: A Novel Approach To The Design of Axial-Flux Switched-Reluctance Motorsrobert_lascuNo ratings yet
- Efficiency Optimization of Slitted-Core Induction Motor: CommunicationsDocument5 pagesEfficiency Optimization of Slitted-Core Induction Motor: CommunicationsEdgar Del Aguila VelaNo ratings yet
- Cogging Torque Minimization of PMBLDCDocument11 pagesCogging Torque Minimization of PMBLDCSanjayNo ratings yet
- Mehmet-Adem JestechDocument14 pagesMehmet-Adem JestechMehmet AKBABANo ratings yet
- 13Electromagnetic Design of a Novel Hybrid FluxDocument5 pages13Electromagnetic Design of a Novel Hybrid FluxRenu SaxenaNo ratings yet
- Nada ShabaanDocument15 pagesNada ShabaanNada ShabanNo ratings yet
- Engineering Science and Technology, An International JournalDocument7 pagesEngineering Science and Technology, An International Journaldiego peinadoNo ratings yet
- Torque Ripple MitigationDocument20 pagesTorque Ripple MitigationSanjayNo ratings yet
- Computation of Additional Losses Due To Rotoreccentricity in Electrical MachinesDocument8 pagesComputation of Additional Losses Due To Rotoreccentricity in Electrical Machinesafru2000No ratings yet
- Permanent Magnet and Wound Salient Pole Synchronous Generator Design ComparisonDocument4 pagesPermanent Magnet and Wound Salient Pole Synchronous Generator Design Comparisonchmvsraju9010No ratings yet
- Energies 12 04615 v2Document19 pagesEnergies 12 04615 v2wgjsesotxjxzosyxjpNo ratings yet
- Ieeecf03282d 4e70 20130916124540 PDFDocument16 pagesIeeecf03282d 4e70 20130916124540 PDFmashinbaz1No ratings yet
- Multibody Dynamics Model of The Cycloidal GearboxDocument9 pagesMultibody Dynamics Model of The Cycloidal GearboxgulipeiloNo ratings yet
- BLDC OptimizationDocument10 pagesBLDC Optimizationa_eftekhariNo ratings yet
- Diagnostyka Modification Krolred2Document9 pagesDiagnostyka Modification Krolred2Everest Engineering Lead R&DNo ratings yet
- Review of Design and Control Optimization of Axial Flux PMSM in Renewable-Energy ApplicationsDocument21 pagesReview of Design and Control Optimization of Axial Flux PMSM in Renewable-Energy Applicationsh.nagarjaNo ratings yet
- IMAC XXII Conf s09p08 Modal Based Predictive Design Analysis Electric MotorsDocument22 pagesIMAC XXII Conf s09p08 Modal Based Predictive Design Analysis Electric MotorsBurak AteşNo ratings yet
- Fatigue Life Prediction For Automobile Coil Spring Using Modal AnalysisDocument6 pagesFatigue Life Prediction For Automobile Coil Spring Using Modal Analysisvivashwanth paiNo ratings yet
- Design of A Three-Phase Multistage Axial Flux Permanent Magnet Generator For Wind Turbine ApplicationsDocument19 pagesDesign of A Three-Phase Multistage Axial Flux Permanent Magnet Generator For Wind Turbine ApplicationskaganNo ratings yet
- Electronics 09 01975 v2Document20 pagesElectronics 09 01975 v2Mellina LisboaNo ratings yet
- Wevj 10 00009 v2 PDFDocument16 pagesWevj 10 00009 v2 PDFFethi ben mebarekNo ratings yet
- Practical Induction 01Document5 pagesPractical Induction 01sathishNo ratings yet
- Câmbio CVT Explicação Força Centrífuga Molas ExcelenteDocument23 pagesCâmbio CVT Explicação Força Centrífuga Molas ExcelenteGardenia AndradeNo ratings yet
- Use and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperDocument5 pagesUse and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperRockerss RockerssNo ratings yet
- Prodotti 7 01703710Document9 pagesProdotti 7 01703710Julius RojoNo ratings yet
- Electromagnetic Design and AnalysisDocument18 pagesElectromagnetic Design and AnalysisMd Ibrahim KhalilNo ratings yet
- Yang 2007Document11 pagesYang 2007Mehmet KayhanNo ratings yet
- Aerodynamic Optimization and Open Field Testing of A 1 KW Vertical-Axis Wind TurbineDocument10 pagesAerodynamic Optimization and Open Field Testing of A 1 KW Vertical-Axis Wind Turbinemtl0612No ratings yet
- Simultaneous Estimation of Wheel-Rail Adhesion and Brake Friction BehaviourDocument6 pagesSimultaneous Estimation of Wheel-Rail Adhesion and Brake Friction BehaviourManjunath AithalNo ratings yet
- Rajagopaldes 2003Document4 pagesRajagopaldes 2003g c agnihotriNo ratings yet
- Magnetic BrakeDocument10 pagesMagnetic BrakeIgnacio Rifo NochezNo ratings yet
- Optimal Design and Control of Axial-Flux Brushless DC Wheel Motor For Electrical VehiclesDocument10 pagesOptimal Design and Control of Axial-Flux Brushless DC Wheel Motor For Electrical Vehiclesfre12345No ratings yet
- Permanent Magnet Synchronous Motor ThesisDocument4 pagesPermanent Magnet Synchronous Motor Thesisubkciwwff100% (2)
- 1765 ArticleText 15686 1 10 20210325Document14 pages1765 ArticleText 15686 1 10 20210325Suman SahaNo ratings yet
- 2023 - Journal - DESIGN AND ANALYSIS OF PERMANENT MAGNET DC MACHINES WITH FEM BASED ANSYSMAXWELLDocument6 pages2023 - Journal - DESIGN AND ANALYSIS OF PERMANENT MAGNET DC MACHINES WITH FEM BASED ANSYSMAXWELLAnand SonkuwarNo ratings yet
- 04 Wheel Axial Flux SRM Drive Light Electric VehiclesDocument8 pages04 Wheel Axial Flux SRM Drive Light Electric VehiclesSek PyroNo ratings yet
- Economic Design of Sleeve Rotor InductioDocument10 pagesEconomic Design of Sleeve Rotor InductioIraqi stormNo ratings yet
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Thesis 20220610 Synchronous Reluctance Motor and Drive System Design For Handheld ApplicationsDocument138 pagesThesis 20220610 Synchronous Reluctance Motor and Drive System Design For Handheld ApplicationsVaishnavi BharatiNo ratings yet
- Refer 5Document14 pagesRefer 5Vaishnavi BharatiNo ratings yet
- IJSEA07081011Document6 pagesIJSEA07081011Vaishnavi BharatiNo ratings yet
- Module 1 BJTDocument111 pagesModule 1 BJTVaishnavi BharatiNo ratings yet
- Module 2 FET TransistorDocument50 pagesModule 2 FET TransistorVaishnavi BharatiNo ratings yet
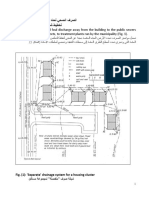
- Drainage Below GroundDocument5 pagesDrainage Below GroundmisharyNo ratings yet
- EN Subiecte Locala 19-20 GIMNAZIU 5-8 A-BDocument16 pagesEN Subiecte Locala 19-20 GIMNAZIU 5-8 A-BSpiridon AndreeaNo ratings yet
- Moxa PT g7728 Series Manual v1.4Document128 pagesMoxa PT g7728 Series Manual v1.4Walter Oluoch OtienoNo ratings yet
- Mic 2 Mkii Installation Instructions and Reference Handbook 4189320057 UkDocument70 pagesMic 2 Mkii Installation Instructions and Reference Handbook 4189320057 Ukkamel kamelNo ratings yet
- Chapter 6Document18 pagesChapter 6Lydelle Mae CabaltejaNo ratings yet
- Bcsbi Pictorial BookDocument24 pagesBcsbi Pictorial BookMALAYADRI DUARINo ratings yet
- Organic Halides Introduction Class-1 NotesDocument15 pagesOrganic Halides Introduction Class-1 Notessiddhartha singhNo ratings yet
- g8 With Answer SheetDocument4 pagesg8 With Answer SheetMICHAEL REYESNo ratings yet
- Suntrust VeronaDocument12 pagesSuntrust Veronalyanca majanNo ratings yet
- In Search of Colonial El Ni No Events and A Brief History of Meteorology in EcuadorDocument7 pagesIn Search of Colonial El Ni No Events and A Brief History of Meteorology in EcuadorDanielNo ratings yet
- Overview: Module 4: Main Aim Subsidiary Aims Personal AimsDocument28 pagesOverview: Module 4: Main Aim Subsidiary Aims Personal AimsIslam TahaNo ratings yet
- Gen Studs and Engg AptiDocument1 pageGen Studs and Engg AptiasishNo ratings yet
- UNHCR Hygiene Promotion GuidelinesDocument112 pagesUNHCR Hygiene Promotion GuidelinesBrandie ShackelfordNo ratings yet
- GraphsDocument18 pagesGraphssaloniNo ratings yet
- ANSWERS - PhyLabS6 EX02 Water TowerDocument8 pagesANSWERS - PhyLabS6 EX02 Water TowerGuacNo ratings yet
- Oliveira Et Al 2010Document8 pagesOliveira Et Al 2010Rômulo AlvesNo ratings yet
- Ozone Therapy Is Safest Known TherapyDocument35 pagesOzone Therapy Is Safest Known Therapyherdin2008100% (1)
- The First Vertebrates, Jawless Fishes, The Agnathans: 2.1 OstracodermsDocument22 pagesThe First Vertebrates, Jawless Fishes, The Agnathans: 2.1 OstracodermsAlejandro Tepoz TelloNo ratings yet
- List of TradeMark Forms & Therein PDFDocument17 pagesList of TradeMark Forms & Therein PDFShreeneetRathiNo ratings yet
- 9de13c0f0c009828f703d0103efa820b.xlsDocument70 pages9de13c0f0c009828f703d0103efa820b.xlsPreeti JaiswalNo ratings yet
- Georgina Smith - Resume 1Document3 pagesGeorgina Smith - Resume 1api-559062488No ratings yet
- Z19 Tnoo 000517 PDFDocument1 pageZ19 Tnoo 000517 PDFGuna RajNo ratings yet
- 'Beware of Being Burgoyned.': Marching Toward Monmouth, Delaware River To Freehold, 18 To 27 June 1778Document35 pages'Beware of Being Burgoyned.': Marching Toward Monmouth, Delaware River To Freehold, 18 To 27 June 1778John U. Rees100% (1)
- B94-6 R1995 E1984Document21 pagesB94-6 R1995 E1984zojoNo ratings yet
- Deodorization - W. de Greyt and M. KellensDocument43 pagesDeodorization - W. de Greyt and M. KellensGabriel VoglarNo ratings yet
- The Body Productive Rethinking Capitalism Work and The Body Steffan Blayney Full ChapterDocument67 pagesThe Body Productive Rethinking Capitalism Work and The Body Steffan Blayney Full Chaptersharon.tuttle380100% (6)
- Web Lab PDFDocument6 pagesWeb Lab PDFDevesh PandeyNo ratings yet
- Arthur Wolk v. Olson, 10-3352, Opposition To Motion To CertifyDocument56 pagesArthur Wolk v. Olson, 10-3352, Opposition To Motion To CertifyTed FrankNo ratings yet