Download as pdf or txt
You might also like
- ARB Retail: Price ListDocument609 pagesARB Retail: Price ListDalvionNo ratings yet
- Toyota EcuDocument13 pagesToyota EcuNeskhy Montoya100% (4)
- Denied Vanity License Plate Requests From Texas DMVDocument31 pagesDenied Vanity License Plate Requests From Texas DMVMary Claire PattonNo ratings yet
- Basics Mud Logging SensorsDocument24 pagesBasics Mud Logging Sensorsmohamed abd elsabour100% (4)
- Turbovisory InstrumentsDocument21 pagesTurbovisory InstrumentsSupratim Pal100% (6)
- Exposure Timer and SwitchesDocument43 pagesExposure Timer and Switchesmamikos86% (28)
- AEB Emulatori-Ing 200310Document80 pagesAEB Emulatori-Ing 200310pitchu1230% (1)
- Kaylasaki: Motorcycle Service ManualDocument353 pagesKaylasaki: Motorcycle Service Manual瑞生No ratings yet
- Automotive Sensors/Actuators: Sensor - Input Actuator - OutputDocument23 pagesAutomotive Sensors/Actuators: Sensor - Input Actuator - Outputcbatawala100% (2)
- Mod 5 Engine TestingDocument73 pagesMod 5 Engine TestingRushikesh PatilNo ratings yet
- Mod 5 Engine TestingDocument73 pagesMod 5 Engine TestingaeroromeosNo ratings yet
- Mud Logging SensorsDocument24 pagesMud Logging Sensorsxiaohafu2000No ratings yet
- Automotive Sensors and Actuators PDFDocument61 pagesAutomotive Sensors and Actuators PDFDeepak NaikNo ratings yet
- Automotive ElectronicsDocument71 pagesAutomotive ElectronicsSamarth Khanna100% (1)
- MechatronicsDocument46 pagesMechatronicsKIran MohanNo ratings yet
- UNIT-6: Emission Control Sensors: Knock Sensor Lambda SensorDocument42 pagesUNIT-6: Emission Control Sensors: Knock Sensor Lambda SensorAnkur SachdevaNo ratings yet
- TransformersDocument76 pagesTransformersPRAVEEN KUMAR SINGH100% (3)
- Sensors and ActuatorsDocument10 pagesSensors and ActuatorsJuma claudeNo ratings yet
- Control & Measuring InstrumentsDocument50 pagesControl & Measuring InstrumentscmcNo ratings yet
- Reshma K V: AnemometerDocument139 pagesReshma K V: Anemometerresham k vNo ratings yet
- EMIDocument25 pagesEMIBala SubramanyamNo ratings yet
- Manufacturing of Turbo GeneratorDocument27 pagesManufacturing of Turbo GeneratorNava Deep100% (2)
- Turbovisory InstrumentsDocument60 pagesTurbovisory InstrumentsSamNo ratings yet
- Sensors and ActuatorsDocument39 pagesSensors and ActuatorsAdiniru AishwaryaNo ratings yet
- Gate Triggering CircuitDocument82 pagesGate Triggering Circuitvraj loginpurposeNo ratings yet
- Topic 5 Miscellaneous Marine Electrical EquipmentDocument159 pagesTopic 5 Miscellaneous Marine Electrical EquipmentkartikNo ratings yet
- UNIT 2 Complete NotesDocument165 pagesUNIT 2 Complete Notesvbarath58No ratings yet
- MI Unit 2Document35 pagesMI Unit 2vbarath58No ratings yet
- Sensors in EngineDocument40 pagesSensors in EngineTanzim Rafat AyonNo ratings yet
- Sensors - AtuatorsDocument76 pagesSensors - AtuatorsVishal MelasarjiNo ratings yet
- Temperature Sensors and Photo SensorsDocument17 pagesTemperature Sensors and Photo SensorsAditya GuptaNo ratings yet
- Automatic Industrial Gas Leakage Monitoring and Power FailureDocument24 pagesAutomatic Industrial Gas Leakage Monitoring and Power FailureBeracah GomesNo ratings yet
- Transducers Updated Part 2Document90 pagesTransducers Updated Part 2BuffboyNo ratings yet
- Sensors and Transducers (Part 2 of 2)Document63 pagesSensors and Transducers (Part 2 of 2)Rivisara VithanageNo ratings yet
- Lecture 9Document22 pagesLecture 9havishalhumNo ratings yet
- Turbine Speed MeasurementDocument26 pagesTurbine Speed MeasurementAyyar Kandasamy100% (4)
- Marine Electrical TechnologyDocument48 pagesMarine Electrical TechnologySaurabh Kumar ThakurNo ratings yet
- Basic of Instrumentation EyassDocument34 pagesBasic of Instrumentation EyassLu'ay ElyaeNo ratings yet
- Chapter 4-ppt - PDF/ InstrumentationDocument46 pagesChapter 4-ppt - PDF/ Instrumentationregassa rajiNo ratings yet
- Chapter 12Document23 pagesChapter 12nabilmalobaNo ratings yet
- Instrumentation in Oil-RefineryDocument39 pagesInstrumentation in Oil-RefineryBNo ratings yet
- Chapter Two: Sensors and ApplicationsDocument58 pagesChapter Two: Sensors and ApplicationsDebebe YirgaNo ratings yet
- Emi 13 TransducerDocument44 pagesEmi 13 TransducerhasibNo ratings yet
- Lecture 6 N 7 30-11-20 - B.Sc. (Agricultural Engineering - Morning - ADocument20 pagesLecture 6 N 7 30-11-20 - B.Sc. (Agricultural Engineering - Morning - AMoiz Khan YousufzaiNo ratings yet
- Thyristor: Silicon Controlled Rectifier (SCR)Document9 pagesThyristor: Silicon Controlled Rectifier (SCR)Vlad V WalachiaNo ratings yet
- Induction MotorDocument27 pagesInduction MotorNandhini SaranathanNo ratings yet
- Hall EffectDocument31 pagesHall EffectPraneshNo ratings yet
- WINSEM2021-22 BECE101L TH VL2021220505673 Reference Material I 04-06-2022 Module 7.2 23Document17 pagesWINSEM2021-22 BECE101L TH VL2021220505673 Reference Material I 04-06-2022 Module 7.2 23gfdffggsNo ratings yet
- Unit - Iii Wind Tunnel Measurements: TransformerDocument2 pagesUnit - Iii Wind Tunnel Measurements: TransformerEmmanuelJeevanandhanNo ratings yet
- Presn. On Gen. SWRDDocument60 pagesPresn. On Gen. SWRDbijoy100% (1)
- Classic Control_1Document63 pagesClassic Control_1Ahmed ElkhateebNo ratings yet
- Mechanical Eng. Dept.: Sensors & Signal ConditioningDocument11 pagesMechanical Eng. Dept.: Sensors & Signal Conditioninghaker linkisNo ratings yet
- Mechanical Eng. Dept.: Sensors & Signal ConditioningDocument11 pagesMechanical Eng. Dept.: Sensors & Signal Conditioningعلي الساعديNo ratings yet
- 2.sensors & ActuatorsDocument30 pages2.sensors & Actuatorszakariyae el mourabit100% (1)
- Igncoilanalyzer: Ignition Coil Analyzer Application Users Manual © 2006 Bowling & GrippoDocument22 pagesIgncoilanalyzer: Ignition Coil Analyzer Application Users Manual © 2006 Bowling & GrippoCipriano M RogerioNo ratings yet
- Trans & OLTC 1104newDocument53 pagesTrans & OLTC 1104newalxbsl96No ratings yet
- Complete Overview of A SubstationDocument152 pagesComplete Overview of A SubstationAnish JunejaNo ratings yet
- Shunt Reactor ConstructionDocument9 pagesShunt Reactor ConstructionIrfan AhmedNo ratings yet
- GAS CHROMATOGRAPHY - Mass SpectrosDocument29 pagesGAS CHROMATOGRAPHY - Mass SpectroslintasamimNo ratings yet
- Basic of Electrical12 EnggDocument52 pagesBasic of Electrical12 EnggSourabh KhandelwalNo ratings yet
- Variable Reluctance TachogeneratorsDocument7 pagesVariable Reluctance TachogeneratorsvarunshastryNo ratings yet
- Summer Training Presentation: Electricity Distribution System AT 220 KV Sub-Station, SahibabadDocument23 pagesSummer Training Presentation: Electricity Distribution System AT 220 KV Sub-Station, SahibabadMarut Awasthi100% (1)
- Boat Maintenance Companions: Electrics & Diesel Companions at SeaFrom EverandBoat Maintenance Companions: Electrics & Diesel Companions at SeaNo ratings yet
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Crf250la (2019)Document168 pagesCrf250la (2019)Adam FadlurahmanNo ratings yet
- 2016 SunnySedan Owner ManualDocument386 pages2016 SunnySedan Owner ManualA QanasNo ratings yet
- RhinoDocument16 pagesRhinoRicardo VladimirNo ratings yet
- 565 MBe 14.100Document5 pages565 MBe 14.100Lee JihoonNo ratings yet
- Anti-Skid Braking System (Abs) : Click On The Applicable Bookmark To Selected The Required Model YearDocument37 pagesAnti-Skid Braking System (Abs) : Click On The Applicable Bookmark To Selected The Required Model YearangeloNo ratings yet
- B4m-Wolverine Rmax2 PDFDocument570 pagesB4m-Wolverine Rmax2 PDFjuan100% (1)
- Form Print RC PDFDocument1 pageForm Print RC PDFR KNo ratings yet
- Bentley Calgary - SalesDocument15 pagesBentley Calgary - SalesTributo500No ratings yet
- Assembly and Parts Drawing: KM186FADocument2 pagesAssembly and Parts Drawing: KM186FAKevin Madera EscalanteNo ratings yet
- Technical Manual: For City Buses, Intercity Buses, and CoachesDocument198 pagesTechnical Manual: For City Buses, Intercity Buses, and CoachesMuhammet KınalıNo ratings yet
- E-Flyer Prebook Cloud EVDocument8 pagesE-Flyer Prebook Cloud EVFariz CircleXVIPNo ratings yet
- Hydraulic Recovery Winch: ModelDocument2 pagesHydraulic Recovery Winch: ModelNoman MubarakNo ratings yet
- Idle Speed ControlDocument4 pagesIdle Speed ControlRichard Dela PeñaNo ratings yet
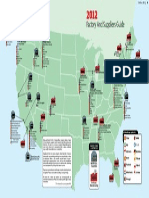
- 2012 Factory and Suppliers GuideDocument1 page2012 Factory and Suppliers GuideMatthew HinesNo ratings yet
- A40 Through A46DLDocument13 pagesA40 Through A46DLAlex Maceira Graterol100% (2)
- Yamaha Nmax 155 - Smart Key Battery LifeDocument1 pageYamaha Nmax 155 - Smart Key Battery Lifemotley crewzNo ratings yet
- Jf016e-Jf017e VTGDocument4 pagesJf016e-Jf017e VTGGabriel ferramentasNo ratings yet
- Honda 160 SeriesDocument18 pagesHonda 160 SeriesRuslanNo ratings yet
- HFKC-3 Rulebook (125 CC) PDFDocument23 pagesHFKC-3 Rulebook (125 CC) PDFSampath KandregulaNo ratings yet
- 1264 DiagramDocument4 pages1264 Diagrampavli999No ratings yet
- Brake System: SectionDocument128 pagesBrake System: SectionFerri JiNo ratings yet
- VersionsDocument7 pagesVersionsLucas Con LNo ratings yet
- Quiz 2 Math5Document3 pagesQuiz 2 Math5ELIZABETH ZULUETANo ratings yet
- E - Engine Weight Table 183.75 FInal 4 14Document8 pagesE - Engine Weight Table 183.75 FInal 4 14JoeNo ratings yet
- Xtrail IPDMxtraDocument29 pagesXtrail IPDMxtraLUIS ALEJANDRONo ratings yet