Download as pdf or txt
You might also like
- Master Thesis Computer Science TopicsDocument4 pagesMaster Thesis Computer Science Topicsmonicacartergrandrapids100% (2)
- Gis PHD ThesisDocument5 pagesGis PHD ThesisLori Mitchell100% (2)
- Effects of Technology Research PaperDocument8 pagesEffects of Technology Research Paperc9j9xqvy100% (2)
- Research Methodology Question Paper PtuDocument6 pagesResearch Methodology Question Paper Ptujmforlwgf100% (1)
- Thesis System Analysis DesignDocument5 pagesThesis System Analysis DesignOrderPapersOnlineUK100% (2)
- Thesis ImplementationDocument6 pagesThesis Implementationbk1svxmr100% (2)
- Thesis Title Examples For Computer ScienceDocument7 pagesThesis Title Examples For Computer Scienceamymilleranchorage100% (2)
- Thesis On Neural NetworkDocument5 pagesThesis On Neural Networkafknlbbnf100% (2)
- MSC Computer Science Thesis Topics ListDocument8 pagesMSC Computer Science Thesis Topics ListDaniel Wachtel100% (2)
- Thesis Title For Android GamesDocument4 pagesThesis Title For Android Gamespatricialeatherbyelgin100% (2)
- Engineering Thesis Problem StatementDocument4 pagesEngineering Thesis Problem Statementcindyturnertorrance100% (2)
- Bachelor Thesis Drucken LassenDocument5 pagesBachelor Thesis Drucken Lassenmelissakulamanchester100% (2)
- Thesis Paper Format PDFDocument8 pagesThesis Paper Format PDFftinuckef100% (2)
- Sample Thesis Project For Information TechnologyDocument8 pagesSample Thesis Project For Information Technologydwnt5e3k100% (2)
- PHD Thesis Proposal PresentationDocument7 pagesPHD Thesis Proposal Presentationafloaaffbkmmbx100% (1)
- Thesis Powerpoint Presentation GuidelinesDocument8 pagesThesis Powerpoint Presentation Guidelinessarahgordonanchorage100% (1)
- PHD Thesis Social Network AnalysisDocument8 pagesPHD Thesis Social Network Analysisdqaucoikd100% (2)
- Thesis 1 2 3Document5 pagesThesis 1 2 3tpynawfld100% (2)
- Computer Technology Thesis StatementDocument7 pagesComputer Technology Thesis Statementfbyhhh5r100% (2)
- PHD Thesis Research MethodologyDocument7 pagesPHD Thesis Research Methodologyafcnzcrcf100% (2)
- Thesis Topics Electronics Communication EngineeringDocument8 pagesThesis Topics Electronics Communication EngineeringTina Gabel100% (2)
- Thesis Chapter 3 OutlineDocument8 pagesThesis Chapter 3 OutlinePaperWritersAlbuquerque100% (2)
- Difference Between Thesis and Literature ReviewDocument8 pagesDifference Between Thesis and Literature Reviewbkx8wryp100% (2)
- Thesis Face DetectionDocument5 pagesThesis Face DetectionCustomPaperSeattle100% (2)
- Automatic Thesis GeneratorDocument6 pagesAutomatic Thesis Generatorafcnwwgnt100% (2)
- Statistics Coursework OutliersDocument8 pagesStatistics Coursework Outlierskezevifohoh3100% (2)
- Introduction of A Thesis WritingDocument4 pagesIntroduction of A Thesis Writingmichellebojorqueznorwalk100% (2)
- Bscs Thesis TitleDocument4 pagesBscs Thesis Titlemeganjoneshuntsville100% (2)
- Number of Pages Master ThesisDocument5 pagesNumber of Pages Master Thesisjenniferwrightclarksville100% (2)
- Information Technology Thesis Titles ListDocument8 pagesInformation Technology Thesis Titles Listjennymancinibuffalo100% (2)
- Thesis Helper SoftwareDocument7 pagesThesis Helper Softwaregjbyse71100% (2)
- Thesis Structure HelpDocument8 pagesThesis Structure Helpaimeebrowngilbert100% (2)
- Profile Essay Thesis ExamplesDocument7 pagesProfile Essay Thesis Examplesgjdpj4jq100% (2)
- Term Paper PDF SampleDocument8 pagesTerm Paper PDF Sampleea3vk50y100% (1)
- MSC Computer Science Dissertation TopicsDocument8 pagesMSC Computer Science Dissertation TopicsOnlinePaperWritingServicesSingapore100% (1)
- Latest Thesis Topics For Information TechnologyDocument4 pagesLatest Thesis Topics For Information Technologyafcnugzpd100% (2)
- Pgimer ThesisDocument6 pagesPgimer Thesiskatrinabankswashington100% (2)
- System Identification PHD ThesisDocument4 pagesSystem Identification PHD ThesisMary Calkins100% (2)
- Master Thesis Data CollectionDocument4 pagesMaster Thesis Data Collectionelenaelmonte100% (2)
- Georgia Tech PHD ThesisDocument6 pagesGeorgia Tech PHD Thesiskatrinaduartetulsa100% (2)
- Thesis Drucken DarmstadtDocument8 pagesThesis Drucken Darmstadtsharonpricecharleston100% (2)
- Honors Thesis ArizonaDocument5 pagesHonors Thesis Arizonaafkodpexy100% (2)
- Thesis Ideas Mechanical EngineeringDocument5 pagesThesis Ideas Mechanical Engineeringlorribynesbridgeport100% (2)
- Design Thesis Projects PDFDocument4 pagesDesign Thesis Projects PDFsarahuntercleveland100% (2)
- Opposing Viewpoints ThesisDocument4 pagesOpposing Viewpoints Thesispawpawtrannorthlasvegas100% (2)
- Thesis Document AnalysisDocument8 pagesThesis Document Analysisandreaariascoralsprings100% (2)
- Thesis Topics in Software Engineering For M.techDocument4 pagesThesis Topics in Software Engineering For M.techkimberlyharrisbaltimore100% (2)
- Thesis 2557Document4 pagesThesis 2557SomeoneWriteMyPaperCanada100% (2)
- Thesis Defense SlidesDocument6 pagesThesis Defense Slidesafkneafpz100% (2)
- Thesis Technology in ClassroomDocument8 pagesThesis Technology in ClassroomPaperWritersCollegeUK100% (2)
- Thesis SnortDocument4 pagesThesis Snortqrikaiiig100% (2)
- Thesis Method SampleDocument7 pagesThesis Method Samplelucycastilloelpaso100% (2)
- Change of Sign CourseworkDocument8 pagesChange of Sign Courseworkf5dvx95v100% (2)
- Computing Coursework WikiDocument8 pagesComputing Coursework Wikijyw0zafiwim3100% (2)
- Research Paper Topic Computer ScienceDocument7 pagesResearch Paper Topic Computer Sciencefvg6kcwy100% (1)
- Thesis Chapter 2 Review of Related LiteratureDocument6 pagesThesis Chapter 2 Review of Related Literaturejennyalexanderboston100% (2)
- Bachelor Thesis Destination MarketingDocument4 pagesBachelor Thesis Destination MarketingChristine Williams100% (2)
- Thesis Topics On Communication EngineeringDocument8 pagesThesis Topics On Communication Engineeringsew0m0muzyz3100% (2)
- Data Modeling ThesisDocument4 pagesData Modeling Thesismoniquejonesnewhaven100% (2)
- Thesis Object TrackingDocument4 pagesThesis Object Trackingsusanmigliacciostamford100% (2)
- Thesis For 6th GradeDocument8 pagesThesis For 6th Grademelissawilsonmanchester100% (2)
- Thesis Fuel MugDocument7 pagesThesis Fuel Mugmelissawilsonmanchester100% (2)
- Thesis Topics in Big DataDocument7 pagesThesis Topics in Big Datamelissawilsonmanchester100% (2)
- How To Write Thesis Statement in Cause and Effect EssayDocument4 pagesHow To Write Thesis Statement in Cause and Effect Essaymelissawilsonmanchester100% (2)
- Thesis Program EvaluationDocument8 pagesThesis Program Evaluationmelissawilsonmanchester100% (1)
- Urdu Thesis PDFDocument4 pagesUrdu Thesis PDFmelissawilsonmanchester100% (1)
- Thesis For Flowers For AlgernonDocument6 pagesThesis For Flowers For Algernonmelissawilsonmanchester100% (1)
- Thesis Statement With Three Points ExampleDocument8 pagesThesis Statement With Three Points Examplemelissawilsonmanchester100% (2)
- Thesis Ancient GreeceDocument5 pagesThesis Ancient Greecemelissawilsonmanchester100% (2)
- C. Thesis StatementDocument6 pagesC. Thesis Statementmelissawilsonmanchester100% (2)
- Search Thesis and DissertationsDocument6 pagesSearch Thesis and Dissertationsmelissawilsonmanchester100% (2)
- Channel Estimation PHD ThesisDocument7 pagesChannel Estimation PHD Thesismelissawilsonmanchester100% (2)
- Masters Thesis Template For LyxDocument7 pagesMasters Thesis Template For Lyxmelissawilsonmanchester100% (2)
- Three Minute Thesis NewcastleDocument5 pagesThree Minute Thesis Newcastlemelissawilsonmanchester100% (1)
- Thesis Proposal Format SampleDocument7 pagesThesis Proposal Format Samplemelissawilsonmanchester100% (2)
- Thesis On Continuing Academic SuccessDocument8 pagesThesis On Continuing Academic Successmelissawilsonmanchester100% (2)
- How To Write A Good Thesis Statement For A Literature EssayDocument6 pagesHow To Write A Good Thesis Statement For A Literature Essaymelissawilsonmanchester100% (2)
- Julia Robinson PHD ThesisDocument8 pagesJulia Robinson PHD Thesismelissawilsonmanchester100% (2)
- Thesis Statement For Essay On AbortionDocument4 pagesThesis Statement For Essay On Abortionmelissawilsonmanchester100% (1)
- Persuasive Thesis Statement For RecyclingDocument7 pagesPersuasive Thesis Statement For Recyclingmelissawilsonmanchester100% (2)
- EE6701-High Voltage EngineeringDocument16 pagesEE6701-High Voltage EngineeringKumar RajNo ratings yet
- My Lesson Plan in Computer HardwareDocument6 pagesMy Lesson Plan in Computer HardwareSeiji Posa100% (1)
- Focus On Medical Power Supplies: Custom Power Solutions System Integration CapabilitiesDocument3 pagesFocus On Medical Power Supplies: Custom Power Solutions System Integration CapabilitiesABD ENOUR BOUALOULNo ratings yet
- Catalog NDC1 SeriesDocument6 pagesCatalog NDC1 Seriesroly denis huaman cusiNo ratings yet
- FE-5050/FE-4050: Instruction ManualDocument75 pagesFE-5050/FE-4050: Instruction Manual-Aidh LeonNo ratings yet
- ICT TG Grade-9 Final J.B. Dixit 12-08-2011 (For Printing)Document72 pagesICT TG Grade-9 Final J.B. Dixit 12-08-2011 (For Printing)ABC NEWS75% (4)
- TATA Update 02Document2 pagesTATA Update 02KizaHimmlerNo ratings yet
- NST ApplicationDocument3 pagesNST ApplicationWildor Cordova SanchezNo ratings yet
- UAV Outback Challenge RulesDocument19 pagesUAV Outback Challenge RulesUAVs AustraliaNo ratings yet
- G-Ultra Wiring Diagrams 23072018 - APDocument7 pagesG-Ultra Wiring Diagrams 23072018 - APRyanNo ratings yet
- Instructions SC AC19 2aDocument5 pagesInstructions SC AC19 2ayu7zengNo ratings yet
- GDSC Info SessionDocument64 pagesGDSC Info SessionGoogle Developer Students Club Student ChapterNo ratings yet
- BCS 011 June 2016 PDFDocument3 pagesBCS 011 June 2016 PDFMaheshNo ratings yet
- Pengembangan Sistem Informasi Perpustakaan Berbasis Web Di SDN Kosambi Menggunakan Metode Waterfall - Kel-4 PDFDocument11 pagesPengembangan Sistem Informasi Perpustakaan Berbasis Web Di SDN Kosambi Menggunakan Metode Waterfall - Kel-4 PDFCalvin 76No ratings yet
- Oms-Mr 30 40.7 4Document5 pagesOms-Mr 30 40.7 4Farshad AbediNo ratings yet
- Basic Overview of Various Aspect of IT ProjectDocument62 pagesBasic Overview of Various Aspect of IT ProjectPranal PatankarNo ratings yet
- Instrumentation Chapter 11Document29 pagesInstrumentation Chapter 11Regine OmboyNo ratings yet
- IC M34 ManualDocument36 pagesIC M34 ManualFlorante Badinas BañariaNo ratings yet
- LLM Use CasesDocument8 pagesLLM Use CasesShakti ShoaibNo ratings yet
- Structural Integrity Silo Design Evaluation Reducing Risks of Failure at Our Coal BuDocument3 pagesStructural Integrity Silo Design Evaluation Reducing Risks of Failure at Our Coal BuRonivonOliveiraNo ratings yet
- Catalogo 5 KW 915 MHZDocument2 pagesCatalogo 5 KW 915 MHZMarcelo Neves GarofaloNo ratings yet
- Dell - EMC - Networking - 6.7.1.6 - ReleaseNotes (N1100, N1500, N2000, N2128PX, N3000E, N3132PX Series Switches)Document102 pagesDell - EMC - Networking - 6.7.1.6 - ReleaseNotes (N1100, N1500, N2000, N2128PX, N3000E, N3132PX Series Switches)zasta1No ratings yet
- Helix Native Pilot's Guide - English (Rev D) PDFDocument47 pagesHelix Native Pilot's Guide - English (Rev D) PDFMauro TonelliNo ratings yet
- 2016-05 Brent Cross Cricklewood - OBJ-51 - M Axon PoEDocument31 pages2016-05 Brent Cross Cricklewood - OBJ-51 - M Axon PoEscribdstorageNo ratings yet
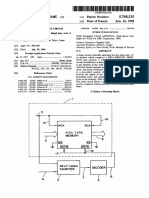
- Time-Adjustable Delay Circuit PDFDocument8 pagesTime-Adjustable Delay Circuit PDFmmorsy1981No ratings yet
- 140DDI84100Document4 pages140DDI84100GioquququqNo ratings yet
- Module-5 - Prototyping and VisualizationDocument16 pagesModule-5 - Prototyping and VisualizationParinay SethNo ratings yet
- Tas 194 Meridian 7200Document14 pagesTas 194 Meridian 7200nikospapaioannouNo ratings yet
- Alc 830Document4 pagesAlc 830parth sapariaNo ratings yet
- Electronic Engine Control4Document1 pageElectronic Engine Control4Jim LiebNo ratings yet