Download as pdf or txt
You might also like
- ReligionsDocument4 pagesReligionsPia Flores67% (3)
- A New Bearing Fault Diagnosis Method Based On Modified Convolutional Neural NetworksDocument9 pagesA New Bearing Fault Diagnosis Method Based On Modified Convolutional Neural NetworksRobert MaximilianNo ratings yet
- A Regularized Deep Clustering Method For Fault Trend AnalysisDocument7 pagesA Regularized Deep Clustering Method For Fault Trend AnalysisCarel N'shimbiNo ratings yet
- A Domain Adaptation Model For Early Gear Pitting Fault Diagnosis Based On Deep Transfer Learning NetworkDocument15 pagesA Domain Adaptation Model For Early Gear Pitting Fault Diagnosis Based On Deep Transfer Learning NetworkCarel N'shimbiNo ratings yet
- Presentation Review of ML in Sound Anoomally DetectionDocument15 pagesPresentation Review of ML in Sound Anoomally DetectionAdebisi RichardNo ratings yet
- A Personalized Diagnosis Method To Detect Faults in Gears Using Numerical Simulation and and Extreme LearningDocument13 pagesA Personalized Diagnosis Method To Detect Faults in Gears Using Numerical Simulation and and Extreme LearningTIKA APRILIANo ratings yet
- A Deep Convolutional Neural Network Based Fusion Method of Two-Direction Vibration Signal Data For Health State Identification of PlanetarygearboxesDocument11 pagesA Deep Convolutional Neural Network Based Fusion Method of Two-Direction Vibration Signal Data For Health State Identification of PlanetarygearboxesghghNo ratings yet
- Audio-Based Fault Diagnosis For Belt Conveyor RollersDocument10 pagesAudio-Based Fault Diagnosis For Belt Conveyor RollersJoão SoaresNo ratings yet
- An Adaptive-Network-Based Fuzzy Inference System For Classification of Welding Defects PDFDocument9 pagesAn Adaptive-Network-Based Fuzzy Inference System For Classification of Welding Defects PDFaliNo ratings yet
- A Convolutional Neural Network For Impact Detection and Characterization of Complex Composite StructureDocument25 pagesA Convolutional Neural Network For Impact Detection and Characterization of Complex Composite StructureOtras CosasNo ratings yet
- Gear Pitting Fault Diagnosis Using Disentangled Features From Unsupervised Deep LearningDocument12 pagesGear Pitting Fault Diagnosis Using Disentangled Features From Unsupervised Deep LearningCarel N'shimbiNo ratings yet
- DiagnosticsDocument4 pagesDiagnostics16061977No ratings yet
- Wang 2020Document13 pagesWang 2020Jorge VallejosNo ratings yet
- Applsci 08 01584Document14 pagesApplsci 08 01584Akash SavaliyaNo ratings yet
- 1 s2.0 S2405959521000096 MainDocument8 pages1 s2.0 S2405959521000096 MainRyan CoetzeeNo ratings yet
- Expert Systems With Applications: Oche Alexander Egaji, Gareth Evans, Mark Graham Griffiths, Gregory IslasDocument7 pagesExpert Systems With Applications: Oche Alexander Egaji, Gareth Evans, Mark Graham Griffiths, Gregory Islaspranay sharmaNo ratings yet
- Sensors: A Convolutional Neural Network For Impact Detection and Characterization of Complex Composite StructuresDocument25 pagesSensors: A Convolutional Neural Network For Impact Detection and Characterization of Complex Composite Structuresathar shahzadNo ratings yet
- SurvishnoDocument10 pagesSurvishnoIman MakroufNo ratings yet
- Learning based multi-obstacle avoidance of unmannedDocument13 pagesLearning based multi-obstacle avoidance of unmannedamal.es23No ratings yet
- Journal of King Saud University - Computer and Information SciencesDocument12 pagesJournal of King Saud University - Computer and Information Scienceskavinkumar.technolegalNo ratings yet
- Wang Et Al - 2020 - Multi-Scale Deep Intra-Class Transfer Learning For Bearing Fault DiagnosisDocument15 pagesWang Et Al - 2020 - Multi-Scale Deep Intra-Class Transfer Learning For Bearing Fault Diagnosiswenk.sitterding.opcNo ratings yet
- Leran How Aotomotive Susteme BuildDocument17 pagesLeran How Aotomotive Susteme BuildeeeeeeeNo ratings yet
- BrazilianDocument16 pagesBrazilianNeerajNo ratings yet
- Amozegar 2016Document17 pagesAmozegar 2016Leroy Lionel SonfackNo ratings yet
- Enhancing Distracted Driver Detection With Human Body Activity Recognition Using Deep Learning F. Zandamela, F. Nicolls, D. Kunene & G. StoltzDocument17 pagesEnhancing Distracted Driver Detection With Human Body Activity Recognition Using Deep Learning F. Zandamela, F. Nicolls, D. Kunene & G. Stoltzjhonatan1.rmvNo ratings yet
- Vibration Analysis of Rotary Machines Using Machine Learning TechniquesDocument6 pagesVibration Analysis of Rotary Machines Using Machine Learning TechniquesBruno RibeiroNo ratings yet
- An Evaluation of Engine Faults Diagnostics Using Artificial Neural NetworksDocument8 pagesAn Evaluation of Engine Faults Diagnostics Using Artificial Neural NetworkssenthilNo ratings yet
- 474-Document Upload-2110-1-10-20180910Document8 pages474-Document Upload-2110-1-10-20180910Ashwin RaiNo ratings yet
- Anomaly Detection For Wind Turbines Based On The ReconstructionDocument12 pagesAnomaly Detection For Wind Turbines Based On The Reconstructionaff kimNo ratings yet
- Preprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningDocument13 pagesPreprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningCesar Vargas ArayaNo ratings yet
- A Data-Driven Health Indicator Extraction Method For Aircraft Air Conditioning System Health MonitoringDocument8 pagesA Data-Driven Health Indicator Extraction Method For Aircraft Air Conditioning System Health MonitoringMurat KızılımakNo ratings yet
- Performance Evaluation of An Automatic Inspection System of Weld Defects in Radiographic Images Based On Neuro-Classifiers PDFDocument13 pagesPerformance Evaluation of An Automatic Inspection System of Weld Defects in Radiographic Images Based On Neuro-Classifiers PDFaliNo ratings yet
- 2020 - 4 - Safety Assessment of Highly Automated Driving Systems in Test Tracks A New FrameworkDocument10 pages2020 - 4 - Safety Assessment of Highly Automated Driving Systems in Test Tracks A New FrameworkEga Iqbal RNo ratings yet
- Atamuradov 22003Document11 pagesAtamuradov 22003DreNo ratings yet
- 1 s2.0 S1568494620308450 MainDocument10 pages1 s2.0 S1568494620308450 MainNazrul HaqemNo ratings yet
- Yao Feng 2018 Machine Learning in Automotive IndustryDocument2 pagesYao Feng 2018 Machine Learning in Automotive IndustryLit LeNo ratings yet
- Measurement: Changqing Shen, Dong Wang, Fanrang Kong, Peter W. TseDocument14 pagesMeasurement: Changqing Shen, Dong Wang, Fanrang Kong, Peter W. TsePradeep KunduNo ratings yet
- Moll 2018Document12 pagesMoll 2018Guillermo AzuaraNo ratings yet
- 1 s2.0 S1877050917314266 MainDocument8 pages1 s2.0 S1877050917314266 Mainmegawati vika pNo ratings yet
- Real Time InfringeDocument5 pagesReal Time InfringeThuThao NguyenNo ratings yet
- Design of A Multi-Model Observer-Based Estimator For Fault Detection and Isolation (Fdi) Strategy: Application To A Chemical ReactorDocument12 pagesDesign of A Multi-Model Observer-Based Estimator For Fault Detection and Isolation (Fdi) Strategy: Application To A Chemical ReactorAfshaNo ratings yet
- AE MattDocument18 pagesAE MattKaterina MurinsNo ratings yet
- A Data-Based Technique For Monitoring of Wound Rotor Induction Machines - A Simulation StudyDocument12 pagesA Data-Based Technique For Monitoring of Wound Rotor Induction Machines - A Simulation Studysamatar AbdiNo ratings yet
- Rear-End Collision Avoidance-Based On Multi-Channel DetectionDocument11 pagesRear-End Collision Avoidance-Based On Multi-Channel Detection吴文豪No ratings yet
- Energies: A Novel Deep Feature Learning Method Based On The Fused-Stacked Aes For Planetary Gear Fault DiagnosisDocument18 pagesEnergies: A Novel Deep Feature Learning Method Based On The Fused-Stacked Aes For Planetary Gear Fault DiagnosisPhamThi ThietNo ratings yet
- Comparison of Random Forest, Artificial Neural Networks and Support Vector Machine For Intelligent Diagnosis of Rotating Machinery PDFDocument13 pagesComparison of Random Forest, Artificial Neural Networks and Support Vector Machine For Intelligent Diagnosis of Rotating Machinery PDFPradeep KunduNo ratings yet
- A New Snapshot Ensemble Convolutional Neural Network For Fault DiagnosisDocument11 pagesA New Snapshot Ensemble Convolutional Neural Network For Fault Diagnosisavk256No ratings yet
- Machine-Learning Approaches and Their Challenges.: ArticleDocument11 pagesMachine-Learning Approaches and Their Challenges.: Articlebaskrish19778308No ratings yet
- Ocean Engineering: Yanghui Tan, Jundong Zhang, Hui Tian, Dingyu Jiang, Lei Guo, Gaoming Wang, Yejin LinDocument11 pagesOcean Engineering: Yanghui Tan, Jundong Zhang, Hui Tian, Dingyu Jiang, Lei Guo, Gaoming Wang, Yejin Linyanbiao liNo ratings yet
- Research On Driver Fatigue State Detection Method Based On Deep LearningDocument9 pagesResearch On Driver Fatigue State Detection Method Based On Deep Learningotik brebesNo ratings yet
- Model Assisted Development of A LaminogrDocument10 pagesModel Assisted Development of A LaminogryeesuenNo ratings yet
- Completion of Collision Avoidance Control Algorithm For Multicopters Based On Geometrical ConstraintsDocument17 pagesCompletion of Collision Avoidance Control Algorithm For Multicopters Based On Geometrical ConstraintsAtiso OtisaNo ratings yet
- Paper FD With RL 2Document30 pagesPaper FD With RL 2Majd SaiedNo ratings yet
- Rotating Machinery Diagnostics Using Deep Learning On Orbit Plot ImagesDocument12 pagesRotating Machinery Diagnostics Using Deep Learning On Orbit Plot ImagesMuhammad Junaid DarNo ratings yet
- Li Et Al. - 2020 - Bearing Fault Feature Selection Method Based On WeDocument18 pagesLi Et Al. - 2020 - Bearing Fault Feature Selection Method Based On Weseyfu mogesNo ratings yet
- Self Driving Simulator PaperDocument7 pagesSelf Driving Simulator PaperAmirNo ratings yet
- (2019-TII) A Novel UKF-RBF Method Based On Adaptive Noise Factor For Fault Diagnosis in Pumping UnitDocument10 pages(2019-TII) A Novel UKF-RBF Method Based On Adaptive Noise Factor For Fault Diagnosis in Pumping UnitallenwuwangNo ratings yet
- 1 s2.0 S0888327023008075 MainDocument24 pages1 s2.0 S0888327023008075 Mainaref akelNo ratings yet
- Rail Enrico ZioDocument12 pagesRail Enrico ZioMahdi MahnazNo ratings yet
- Data Science and Interdisciplinary Research: Recent Trends and ApplicationsFrom EverandData Science and Interdisciplinary Research: Recent Trends and ApplicationsNo ratings yet
- What Every Musician Needs To Know About The Body: The Practical Application of Body Mapping To Making Music Bridget JankowskiDocument70 pagesWhat Every Musician Needs To Know About The Body: The Practical Application of Body Mapping To Making Music Bridget Jankowskicmotatmusic100% (6)
- A30 CismDocument14 pagesA30 CismRohan SharmaNo ratings yet
- Nursing HomeDocument90 pagesNursing HomeParvinder Singh RockyNo ratings yet
- CascadeTEK Vacuum Oven ManualDocument49 pagesCascadeTEK Vacuum Oven ManualCascade TEKNo ratings yet
- Hx-Chart Humid Air: Humidity Ratio, G/KG (Dry Air)Document1 pageHx-Chart Humid Air: Humidity Ratio, G/KG (Dry Air)KundzoNo ratings yet
- Andon PDFDocument24 pagesAndon PDFFrilya Andarni Saragih SumbayakNo ratings yet
- GA Standard PPT (Cooling N Staging) .PGIDocument23 pagesGA Standard PPT (Cooling N Staging) .PGIBasit AbdulNo ratings yet
- 2016 CV - Curriculum Vitae Duy Anh 1Document11 pages2016 CV - Curriculum Vitae Duy Anh 1Cao Quang HưngNo ratings yet
- Japan TechnologyDocument4 pagesJapan TechnologyMa Leonora SorianoNo ratings yet
- Computer Graphics PDFDocument2 pagesComputer Graphics PDFAakash KhannaNo ratings yet
- 25 Secrets of Mona Lisa RevealedDocument12 pages25 Secrets of Mona Lisa Revealeddeebee80No ratings yet
- Software Requirement Engineering - CS708 Power Point Slides Lecture-09Document25 pagesSoftware Requirement Engineering - CS708 Power Point Slides Lecture-09ALTAIRI SALEHNo ratings yet
- Vigil Incidents HistoryDocument42 pagesVigil Incidents HistoryJohn Petrovich WayneNo ratings yet
- FAKRO Technical Specification DRF DU6 PDFDocument2 pagesFAKRO Technical Specification DRF DU6 PDFthomasNo ratings yet
- Tugas 2 Bahasa Dan Terminologi Hukum 14Document2 pagesTugas 2 Bahasa Dan Terminologi Hukum 14Bayu Indra PamungkasNo ratings yet
- SUVAT LoopDocument1 pageSUVAT LoopAhmed ZakiNo ratings yet
- 420 Economic Survey Chapter 11 Thalinomics IndiashastraDocument1 page420 Economic Survey Chapter 11 Thalinomics IndiashastraKarambir Singh DhayalNo ratings yet
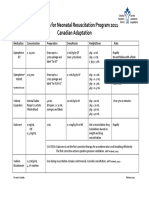
- Medications For Neonatal Resuscitation Program 2011 Canadian AdaptationDocument1 pageMedications For Neonatal Resuscitation Program 2011 Canadian AdaptationrubymayNo ratings yet
- Feasibility Study Project Proposal RequirementsDocument2 pagesFeasibility Study Project Proposal RequirementsErick NgosiaNo ratings yet
- Immuno DiffusionDocument3 pagesImmuno DiffusionSai SridharNo ratings yet
- Multiple MyelomaDocument8 pagesMultiple MyelomaFelipeNo ratings yet
- Broadcast Equipment Radio EditedDocument35 pagesBroadcast Equipment Radio EditedMBURU MARTIN KARIUKINo ratings yet
- DLL WK 10 LC 171819Document14 pagesDLL WK 10 LC 171819Regiel Guiang ArnibalNo ratings yet
- Data Warehouse Slide3Document43 pagesData Warehouse Slide3Kai EnezhuNo ratings yet
- Carroll Solo Bed - Technical ManualDocument42 pagesCarroll Solo Bed - Technical Manualtaioba2010No ratings yet
- Jeab 1 PsDocument20 pagesJeab 1 PsDharmveer KumarNo ratings yet
- 7 - Simulations and PFDsDocument23 pages7 - Simulations and PFDsIslam SolimanNo ratings yet
- 04 Control of Reactive PowerDocument30 pages04 Control of Reactive PowersulemankhalidNo ratings yet