Download as pdf or txt
You might also like
- Theory of Machines and Mechanisms 5th Edition Shigley Solution Manual PDFDocument15 pagesTheory of Machines and Mechanisms 5th Edition Shigley Solution Manual PDF김영우[학생](공과대학 산업경영공학과)No ratings yet
- Physics Lab Report Ryvaley, Hanson, JasonDocument3 pagesPhysics Lab Report Ryvaley, Hanson, JasonjethroNo ratings yet
- EN 1991-1-4, NotesDocument9 pagesEN 1991-1-4, Noteslokomoko1No ratings yet
- MECH 3416 Fundamentals ofDocument34 pagesMECH 3416 Fundamentals ofYang Woo SeongNo ratings yet
- Basic AerodynamicsDocument29 pagesBasic AerodynamicsirvinelegoNo ratings yet
- MECH3416 (2022) ppt-C1Document34 pagesMECH3416 (2022) ppt-C1Mandy ShiuNo ratings yet
- Investigation of Aerodynamic Efficiency On Naca 2412 Airfoil IJERTV10IS090243Document4 pagesInvestigation of Aerodynamic Efficiency On Naca 2412 Airfoil IJERTV10IS090243hutkuosliNo ratings yet
- Aer2007 2221ers1 1 7Document10 pagesAer2007 2221ers1 1 7lightyears4991No ratings yet
- Chap1 CTDocument18 pagesChap1 CTghouseNo ratings yet
- Static Aeroelasticity: I H I I BL H L H U LL LL L Ul I I L U I I L 1Document1 pageStatic Aeroelasticity: I H I I BL H L H U LL LL L Ul I I L U I I L 1OSCARDELTANo ratings yet
- Ijett V67i4p216Document3 pagesIjett V67i4p216Sel MaNo ratings yet
- Valuation of Ollapse Echanism of Elecommunication OwerDocument1 pageValuation of Ollapse Echanism of Elecommunication OwerarjuncreqNo ratings yet
- 2014 OctDocument13 pages2014 OctMulisa MukwevhoNo ratings yet
- Jeb21572 Full PDFDocument14 pagesJeb21572 Full PDFDEEPESH KUMARNo ratings yet
- S3 AerodynamicPerformanceDocument16 pagesS3 AerodynamicPerformancesantiago hernandezNo ratings yet
- Estimating RC Model Aerodynamics and PerformanceDocument11 pagesEstimating RC Model Aerodynamics and PerformanceMito MiguelNo ratings yet
- Attempt All Questions. For Full Credit, Write Dimensions in The Answers. - Maintain Academic IntegrityDocument5 pagesAttempt All Questions. For Full Credit, Write Dimensions in The Answers. - Maintain Academic IntegrityFabNo ratings yet
- Development of Vtol Uav With Module For Direction Finding: Kyoung-Moo Min, Foong-Yi Chia & Bong-Hwan KimDocument10 pagesDevelopment of Vtol Uav With Module For Direction Finding: Kyoung-Moo Min, Foong-Yi Chia & Bong-Hwan KimTJPRC PublicationsNo ratings yet
- +++++++ESTIMATING RC MODEL AERODYNAMICS AND PERFORMANCE-RC Airplane DesignDocument13 pages+++++++ESTIMATING RC MODEL AERODYNAMICS AND PERFORMANCE-RC Airplane Designumunera2997No ratings yet
- An-experimental-approach-on-aerodynamic-stability-of-a-cable-stayed-cantilever-bridge_2002_Journal-of-Wind-Engineering-and-Industrial-AerodynamicsDocument13 pagesAn-experimental-approach-on-aerodynamic-stability-of-a-cable-stayed-cantilever-bridge_2002_Journal-of-Wind-Engineering-and-Industrial-AerodynamicsELIOT PEZO ZEGARRANo ratings yet
- Summary NotesDocument21 pagesSummary NotesirvinelegoNo ratings yet
- Narathepp,+255612190825 - 53 Js Crma P 127 135Document9 pagesNarathepp,+255612190825 - 53 Js Crma P 127 135Zaya TunNo ratings yet
- Supercritical Airfoils With FluentDocument10 pagesSupercritical Airfoils With FluentErnesto Padilla MarquezNo ratings yet
- Chapter2-Bearing Capacity of FoundationDocument13 pagesChapter2-Bearing Capacity of FoundationDAWITNo ratings yet
- Bezier CurveDocument12 pagesBezier CurveAnh NgoNo ratings yet
- U1721199 RP3reportDocument24 pagesU1721199 RP3reporttanuj SHARMANo ratings yet
- rr312103 Aerodynamics IIDocument5 pagesrr312103 Aerodynamics IISRINIVASA RAO GANTANo ratings yet
- III YearDocument186 pagesIII YearHarsha Har67% (3)
- Numerical Study On Aerodynamics of Tandem WingDocument8 pagesNumerical Study On Aerodynamics of Tandem WingHari100% (1)
- Elastic Axis NasaDocument18 pagesElastic Axis Nasatalhamap2425No ratings yet
- Ebcs-1 5Document18 pagesEbcs-1 5Samuel Gezahegn0% (1)
- Figure 3. 1: Isometric View of The Designed AircraftDocument35 pagesFigure 3. 1: Isometric View of The Designed AircraftNoel SabuNo ratings yet
- Shaft Design Under Fatigue Loading by UsDocument6 pagesShaft Design Under Fatigue Loading by Uslk700615No ratings yet
- AerospikeDocument21 pagesAerospikeChristan LNo ratings yet
- Ae3691 Flight DynamicsDocument6 pagesAe3691 Flight DynamicsB.ShainazNo ratings yet
- (MECH1907) (2021) (F) Final Kbuox7e 32726Document10 pages(MECH1907) (2021) (F) Final Kbuox7e 32726Wish SetsNo ratings yet
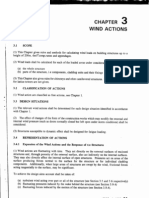
- Chap-3 Structural Design 2012 LoadsDocument74 pagesChap-3 Structural Design 2012 LoadsABAMELANo ratings yet
- 19AEE301 CA3 4 QP 2023Document3 pages19AEE301 CA3 4 QP 2023gnsvaravishwas03No ratings yet
- EN 1991-1-4 Denmark NADocument10 pagesEN 1991-1-4 Denmark NAcpm101No ratings yet
- Spacetechnology, Module - 8, Lecture-1: Reentry DynamicsDocument5 pagesSpacetechnology, Module - 8, Lecture-1: Reentry DynamicsSid Siddapa SidhuNo ratings yet
- MACE60035 Principles of Structural Engineering Design 18-19Document12 pagesMACE60035 Principles of Structural Engineering Design 18-19KrisNo ratings yet
- Aerodynamic Characterisation of Rocket F A5fda0b0Document5 pagesAerodynamic Characterisation of Rocket F A5fda0b0SamiNo ratings yet
- Wing Design Adp 1Document17 pagesWing Design Adp 1ravi kumarNo ratings yet
- 4.. Aircraft InstrumentsDocument7 pages4.. Aircraft InstrumentsJoshua SNo ratings yet
- Design of A Minimum Mass Wing-Box: Professor J. CooperDocument35 pagesDesign of A Minimum Mass Wing-Box: Professor J. CooperGrey Kelly Marquez RondonNo ratings yet
- Nila Bogateanu Stere v4 Iss 1 FullDocument8 pagesNila Bogateanu Stere v4 Iss 1 FullWilly Chayña LeonNo ratings yet
- 1989 The Automatic Analysis of Prestressed Concrete Poles For Street LightingDocument10 pages1989 The Automatic Analysis of Prestressed Concrete Poles For Street LightingChandara KOEMNo ratings yet
- C3 Slope StabilityDocument41 pagesC3 Slope Stability2499361939wNo ratings yet
- AldesME Flash32Document6 pagesAldesME Flash32Arul SankaranNo ratings yet
- Design of A Wing With Bell-Shaped Span-Load Using VLM MethodDocument4 pagesDesign of A Wing With Bell-Shaped Span-Load Using VLM Methodrajesh2709No ratings yet
- Write Up On Wind Actions As Per EN 1991Document17 pagesWrite Up On Wind Actions As Per EN 1991AS V KameshNo ratings yet
- Design & Flight Test Result of A Small Scale Hybrid Vtol UavDocument8 pagesDesign & Flight Test Result of A Small Scale Hybrid Vtol UavTJPRC PublicationsNo ratings yet
- Wing Mass CalculationDocument3 pagesWing Mass Calculationjacob ellyNo ratings yet
- Blade Theory: by Assistant Lecturer Layth Abed HassnaweDocument18 pagesBlade Theory: by Assistant Lecturer Layth Abed HassnaweBilal BouakrifNo ratings yet
- Conventional Aircraft Wing Preliminary DDocument6 pagesConventional Aircraft Wing Preliminary Dalexpnitb2000No ratings yet
- AerooDocument35 pagesAerooVinu GNo ratings yet
- Aer2007 2211ers1 1 18Document9 pagesAer2007 2211ers1 1 18lightyears4991No ratings yet
- Ijresm V2 I3 223 PDFDocument4 pagesIjresm V2 I3 223 PDFMirkoD.InterbartoloNo ratings yet
- Yang 2012 CPLDocument4 pagesYang 2012 CPLFacell ELTNo ratings yet
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Ball MillDocument4 pagesBall MillGM MalikNo ratings yet
- Lecture 15-18 Ch09 Complex NumbersDocument46 pagesLecture 15-18 Ch09 Complex Numbersameershamieh100% (1)
- The Traditional Igorot BagDocument8 pagesThe Traditional Igorot BagayaMhaeNo ratings yet
- Unit 6-Fluid MechanicsDocument25 pagesUnit 6-Fluid MechanicsApechRanger100% (4)
- Reynolds ExperimentDocument4 pagesReynolds ExperimentShubhangi Bansude100% (1)
- Dynamics SolutionsDocument62 pagesDynamics Solutionsanthony100% (1)
- Newtons Law of Universal GravitationDocument9 pagesNewtons Law of Universal GravitationAngelo SaysonNo ratings yet
- Lesson Plan: Lesson: Projectiles Without Air ResistanceDocument4 pagesLesson Plan: Lesson: Projectiles Without Air ResistanceeltytanNo ratings yet
- Galileo and NewtonDocument25 pagesGalileo and NewtonMarvin Darius LagascaNo ratings yet
- SeverDocument22 pagesSeverspiritos123456789No ratings yet
- O Levels Physics BookDocument13 pagesO Levels Physics BookTalha Ahsan100% (1)
- EC6801 Unit 1 MCQDocument17 pagesEC6801 Unit 1 MCQVanitha R100% (1)
- External FlowDocument49 pagesExternal FlowTusanita MapuolaNo ratings yet
- Wph1 June 2022 QP Unit 1 Edexcel Ial PhysicsDocument14 pagesWph1 June 2022 QP Unit 1 Edexcel Ial PhysicsTom ChanNo ratings yet
- 11 Physics Test Paper Ch3 1Document4 pages11 Physics Test Paper Ch3 1Devendar SharmaNo ratings yet
- Assignment 1Document5 pagesAssignment 1Ruvenderan SuburamaniamNo ratings yet
- Experiment No. 9 Hydraulic Jump I. Objectives: To Observe The Hydraulic Jump in Open Channel Flow by The Use of Control Gates and WeirsDocument5 pagesExperiment No. 9 Hydraulic Jump I. Objectives: To Observe The Hydraulic Jump in Open Channel Flow by The Use of Control Gates and WeirsJohn Emerald GoloNo ratings yet
- Boundary Layer and Flow Past Through Submerged Body Numericals - KN DulalDocument12 pagesBoundary Layer and Flow Past Through Submerged Body Numericals - KN Dulalआदित्य राज अधिकारीNo ratings yet
- Takeoff ResumenDocument10 pagesTakeoff ResumenoibNo ratings yet
- Freq Wavelength Practice (With Answers)Document2 pagesFreq Wavelength Practice (With Answers)Kenneth FriasNo ratings yet
- 3 Kater S PendulumDocument11 pages3 Kater S Pendulumjocas100% (1)
- Flow Through Pipes: Fluid MechanicsDocument20 pagesFlow Through Pipes: Fluid MechanicsSantosh TrimbakeNo ratings yet
- Phy Motion and Time Wind, Storm and Cyclones Heat Electricity Light 7th WA SplitDocument36 pagesPhy Motion and Time Wind, Storm and Cyclones Heat Electricity Light 7th WA Splitnihal.sushma10No ratings yet
- Laws of Motion (Irodov)Document70 pagesLaws of Motion (Irodov)akhileshvv123No ratings yet
- Diffraction-Circular Aperture+telescopeDocument6 pagesDiffraction-Circular Aperture+telescopeVishal GaurNo ratings yet
- Chapter 12Document24 pagesChapter 12Krause SpencerNo ratings yet
- 9I Forces & Motion Year 9 NotesDocument100 pages9I Forces & Motion Year 9 Notesebrahimb5253No ratings yet